PROTOTIPO PARA DEMOSTRACIÓN DE LA PRIMERA Y SEGUNDA LEYES DE NEWTON
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación
23
Revista Internacional de la Educación en Ingeniería, Vol. 6, No. 1, 2013, 23-34
ISSN 1940-1116
AcademiaJournals.com
PROTOTIPO PARA DEMOSTRACIÓN DE LA
PRIMERA Y SEGUNDA LEYES DE NEWTON
Jesús Medina Cervantes1, Rubén Villafuerte Díaz2, Edgar Mejía Sánchez3
Resumen—La mecánica clásica se sustenta en las tres leyes de Newton. Dichas leyes son conceptos fundamentales
que describen las causas y efectos del movimiento de los cuerpos. En este artículo se presenta un prototipo que tiene como
finalidad la demostración experimental de la primera y segunda leyes de Newton, con la premisa de apoyar
sustancialmente al aprendizaje de las mismas. El prototipo es un riel de aire, el cual está diseñado para que la realización
de los experimentos sea sencilla y se puedan visualizar los resultados de manera inmediata. El riel de aire cuenta con un
sistema de adquisición de datos que se encarga de recibir la información enviada por sensores ópticos, convertirla en datos
de tiempo y enviarlos mediante el protocolo RS-232 a una interfaz de usuario instalada en una PC. La interfaz de usuario
fue desarrollada en Matlab. Los resultados de los experimentos demuestran el buen funcionamiento y precisión alcanzada
por el dispositivo.
Palabras clave—Leyes de Newton, riel de aire, adquisición de datos, regresión por mínimos cuadrados, Matlab.
Nomenclatura
Coeficientes de regresión
Aceleración constante
Aceleración de la gravedad
Ángulo de contacto entre hilo y polea
Coeficiente de fricción cinética
Coeficiente de fricción entre hilo y polea
Componentes de fuerza sobre los ejes del plano inclinado
Datos experimentales
Ejes de coordenadas
Ejes de coordenadas del plano inclinado
Fuerza de fricción cinética
Fuerza de la pesa
Fuerza externa neta
Fuerza normal
Masa de la pesa
Masa del cuerpo de prueba
Número de datos para la regresión
Peso del cuerpo de prueba
Posición final
Posición inicial
Tensión del hilo
Tiempo
Velocidad constante
Velocidad final
Velocidad inicial
1
El M.C. Jesús Medina Cervantes es profesor de la Facultad de Ingeniería de la Universidad Veracruzana, Ciudad Mendoza,
Veracruz, México. jemedina@uv.mx (autor corresponsal)
2
El Dr. Rubén Villafuerte Díaz es profesor de la Facultad de Ingeniería de la Universidad Veracruzana, Ciudad Mendoza,
Veracruz, México. rvillafuerte@uv.mx
3
El Dr. Edgar Mejía Sánchez es profesor de la Facultad de Ingeniería de la Universidad Veracruzana, Ciudad Mendoza, Veracruz,
México. edmejia@uv.mx
24
Introducción
En 1687, Isaac Newton presentó sus tres leyes del movimiento en su obra titulada Philosophiae Naturalis
Principia Mathematica. Esta teoría sentó las bases de lo que hoy se conoce como Mecánica clásica. Teorías más
recientes como la Relatividad especial y la Mecánica cuántica han demostrado que las leyes de Newton tienen
limitaciones al describir el movimiento de objetos que se mueven con gran rapidez o el movimiento de partículas
microscópicas como los electrones. Sin embargo, fuera de esos campos de estudio, la mecánica clásica explica con
gran precisión los fenómenos de movimiento y sus causas (Resnick, R. et. al., 2002).
Por lo anterior, entender las causas y efectos del movimiento resulta muy importante para cualquier estudiante o
profesional de ingeniería. Sin embargo, comprender leyes tan fundamentales como las que propuso Isaac Newton
puede resultar una tarea nada sencilla de realizar, sobretodo cuando estas se describen de manera abstracta. La
posibilidad de observar los fenómenos físicos que respaldan las teorías planteadas, sin duda, permiten una mejor y
más rápida comprensión de los mismos. En este artículo se presenta el diseño e implementación de un prototipo de
bajo costo que permite la demostración experimental de la primera y segunda leyes de Newton, denominado riel de
aire. El prototipo es de fácil construcción, por lo que puede ser replicado para su uso en escuelas de nivel
Secundaria, Enseñanza media o Profesional.
Leyes de Newton
La primera ley de Newton expresa que si no actúa una fuerza externa neta sobre un cuerpo, este permanece en
reposo si estaba quieto o se mueve con velocidad constante si estaba en movimiento (Serway, R., 1999). Esta ley
postula entonces que un cuerpo no puede cambiar por sí solo su estado inicial, a menos que una fuerza neta actúe
sobre él. El movimiento de un cuerpo que se mueve con velocidad constante recibe el nombre de movimiento
rectilíneo uniforme (MRU). Para que este tipo de movimiento ocurra sobre un cuerpo en ausencia de una fuerza
externa aplicada, no debe existir fricción en las superficies de contacto entre el suelo y el cuerpo en movimiento. En
la figura 1 se presenta el diagrama de cuerpo libre de la masa móvil de prueba para el MRU.
Figura 1. Diagrama de cuerpo libre para una masa en movimiento rectilíneo uniforme.
Las ecuaciones que describen el MRU son las siguientes:
ec. 1
ec. 2
ec. 3
La representación gráfica del MRU se presenta en la figura 2. En ella se puede apreciar que el desplazamiento es
lineal; la inclinación de la recta indica la rapidez del cambio de posición del cuerpo con respecto del tiempo. Por otro
lado, la velocidad al ser constante es representada por una línea recta horizontal, en tanto que la aceleración es cero a
lo largo del tiempo.
Figura 2. Gráficas del movimiento rectilíneo uniforme.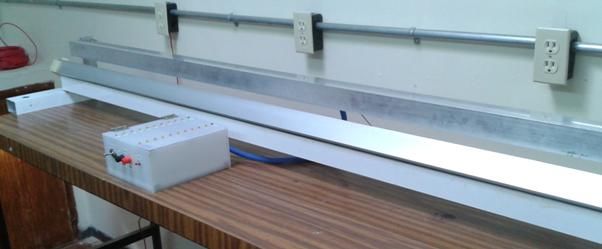
25
La segunda ley de Newton expone que la aceleración de un cuerpo es directamente proporcional a la fuerza
externa neta que actúa sobre él (Serway, R., 1999). La expresión matemática que describe esta ley es:
ec. 4
Si se presenta el caso particular en el que la fuerza permanece constante, se produce en el cuerpo un movimiento
rectilíneo uniformemente acelerado (MRUA). En el riel de aire se producirá y analizará este tipo de movimiento
mediante dos arreglos diferentes, el primero es mediante un plano inclinado y el segundo es mediante la aplicación
de una fuerza constante. Para el primer caso, la fuerza constante proporcionada por la componente de la fuerza de
gravedad en la dirección del plano inclinado será la que producirá la aceleración constante del cuerpo de prueba;
mientras que en el segundo caso será el peso de otra masa conectada mediante un hilo al cuerpo de prueba la que
produzca la fuerza constante. Los diagramas de cuerpo libre para ambos arreglos se presentan en la figura 3.
Figura 3. Diagramas de cuerpo libre para una masa móvil en movimiento rectilíneo uniformemente acelerado.
Para el cuerpo sobre el plano inclinado, la aceleración se determina de la siguiente manera:
ec. 5
Para el arreglo de hilo y polea, la aceleración del cuerpo de masa arrastrado por la fuerza debida a la pesa de
masa es:
ec. 6
Para ambos casos, las ecuaciones que describen el MRUA son las siguientes:
ec. 7
ec. 8
ec. 9
Las gráficas del MRUA se muestran en la figura 4. En las gráficas se observa claramente el comportamiento
parabólico del desplazamiento; ahora la velocidad varía de forma lineal y la pendiente de la recta indica la rapidez de
cambio de la velocidad con respecto al tiempo. La aceleración es representada por una línea recta horizontal a lo
largo del tiempo, pues se mantiene constante.
Figura 4. Gráficas del movimiento rectilíneo uniformemente acelerado.
Diseño del riel de Aire
Para diseñar el prototipo riel de aire se establecieron como condiciones que fuera de bajo costo, liviano, duradero,
estético y sencillo de operar para los usuarios. Con esto en mente, se eligió al aluminio como material para la
estructura completa del riel de aire, ya que es un material liviano, agradable a la vista, no se oxida y su acabado liso
sirve para los propósitos del prototipo.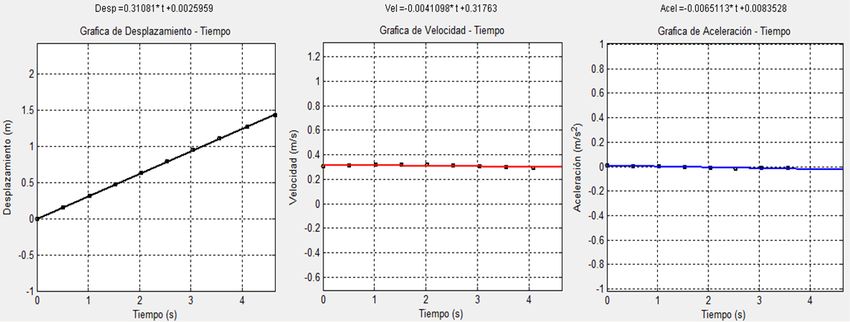
26
El riel debe contar con una entrada que se acople mediante una manguera a la descarga de un compresor, por la
cual debe circular el aire para que llene completamente al riel. De esta manera, el aire escapará a través de las
pequeñas perforaciones con las que contará el riel en dos de sus caras, consiguiendo así que este aire produzca que la
masa móvil de prueba flote sobre el riel y como consecuencia disminuya sustancialmente la fricción entre las caras
de contacto del riel y la masa móvil de prueba.
El diseño del prototipo se realizó empleando la versión de estudiante del software de diseño paramétrico
Autodesk Inventor. El riel de aire está conformado por una estructura compuesta en su mayoría de perfiles cuadrados
y ángulos de 2 pulg de ancho. El riel principal es un perfil cuadrado con longitud de 2 metros y será colocado de
manera que parezca un rombo; así en cada una de sus dos caras superiores contará con 91 perforaciones de 1/32 pulg
de diámetro, separadas por una distancia de 20mm a lo largo de todo el riel. En la figura 5 se muestra el detalle de la
disposición de las perforaciones sobre el riel.
Figura 5. Perforaciones de 1/32” en las caras superiores del riel.
Durante la realización de los experimentos sobre el riel de aire, será necesario obtener información del
movimiento de la masa móvil de prueba. Para ello, los autores decidieron diseñar e implementar un sistema de
adquisición de datos de bajo costo, con el cual un microcontrolador se encargará de recibir y gestionar las señales
digitales de 10 sensores ópticos CNY70. Dichos sensores se colocarán de manera distribuida, separados por una
distancia de 16cm, para detectar el paso de la masa móvil de prueba a lo largo de la trayectoria del riel.
La estructura del riel contará entonces con un soporte para los sensores, el cual estará compuesto por dos ángulos
unidos mediante dos bisagras. Este soporte se ubicará por encima del riel y albergará los circuitos electrónicos
necesarios para amplificar y digitalizar las señales de los sensores CNY70. Puesto que el soporte constará de dos
partes, el ángulo superior podrá levantarse para que los usuarios tengan fácil acceso a los circuitos de los sensores y
estos puedan ser calibrados, en caso de ser necesario.
Por otro lado, el riel de aire también contará con una polea colocada sobre uno de sus extremos. Esta polea
permitirá realizar experimentos relacionados con la segunda ley de Newton. Una vez diseñados todos los
componentes, estos fueron ensamblados para obtener el diseño completo del riel de aire. En la figura 6 se muestra
una imagen renderizada del prototipo completo.
Figura 6. Diseño del riel de aire con Autodesk Inventor.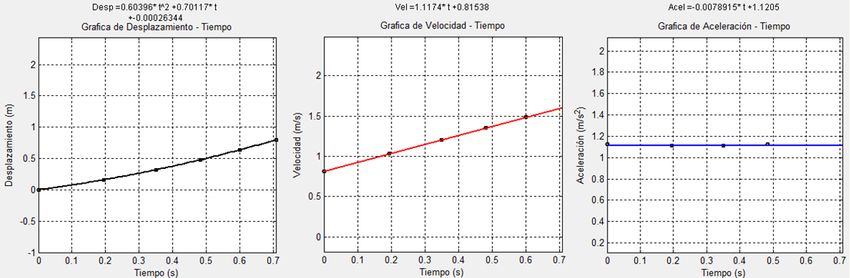
27
Tarjeta de Adquisición de Datos
La tarjeta de adquisición de datos es controlada mediante el microcontrolador PIC18F4550. Como ya se
mencionó, la función principal de la tarjeta de adquisición de datos es la de recibir información de los sensores
ópticos CNY70, el microcontrolador se encarga entonces de procesar dicha información y calcula los tiempos de
activación de cada uno de los sensores. Puesto que se requiere una buena precisión en el cálculo de los tiempos, el
microcontrolador fue configurado para trabajar a 48MHz, la cual es su frecuencia máxima de operación. Por último,
el microcontrolador envía los tiempos calculados hacia una PC mediante el protocolo de comunicación RS-232. El
proceso de operación de la tarjeta de adquisición de datos se resume en el diagrama de flujo mostrado en la figura 7.
Figura 7. Diagrama de flujo de la operación de la tarjeta de adquisición de datos.
La información presentada en este artículo corresponde a la utilización de 10 sensores ópticos CNY70, separados
de manera uniforme y precisa en el soporte de sensores. Sin embargo, la tarjeta de adquisición de datos realizada
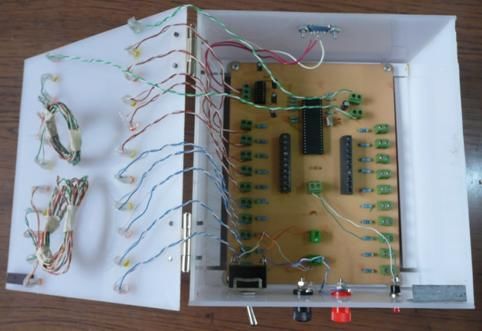
puede operar hasta con 20 sensores. En la figura 8 se presenta el montaje de la tarjeta diseñada en este proyecto.
Figura 8. Tarjeta de adquisición de datos.
Las filas superior e inferior de clemas de color verde están destinadas para conectarles LEDs que se iluminarán
durante el desarrollo del experimento, indicando que se ha detectado el paso de la masa móvil por cada uno de los
sensores. La otra función que tienen, es la de servir como indicadores de buen funcionamiento durante el proceso de
calibración de los sensores CNY70. También, en la figura 4 se pueden observar dos tiras de clemas de color negro; a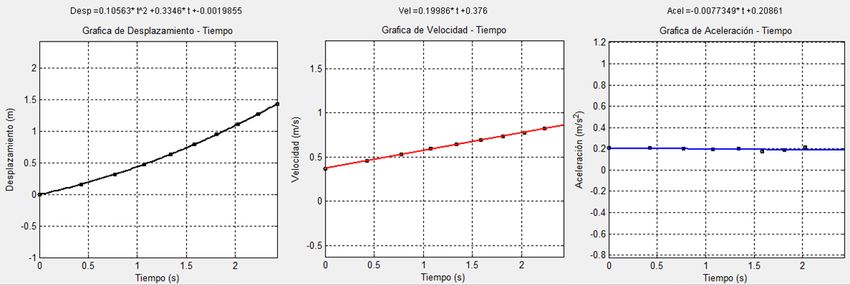
28
través de ellas se recibirán las señales de los sensores CNY70. En la parte inferior izquierda se ve el montaje del
integrado MAX232 y en la parte central izquierda se encuentra el PIC18F4550. En la figura 9 se muestran las
conexiones internas del sistema de adquisición de datos.
Figura 9. Conexiones internas del sistema de adquisición de datos.
Para los propósitos de este proyecto, los sensores CNY70 sirven como detectores de presencia y envían señales
digitales al microcontrolador. Debido a que los sensores CNY70 entregan una señal analógica, es necesario
acondicionar dicha señal. Para ello se utiliza el amplificador operacional LM358, el cual trabaja como comparador
de tensión. Mediante un potenciómetro se ajusta la tensión de corte, entregando la señal digital deseada. En este
proyecto se diseñó un circuito acondicionador de señal en el cual se pueden montar hasta 4 sensores CNY70, por lo
que en total fueron construidos 3 montajes acondicionadores de señal. El circuito básico para este tipo de
acondicionamiento de señal se presenta en (Palacios, E. et. al., 2004). Mediante este circuito se configuraron los
sensores CNY70 para enviar una señal digital ante la presencia de material de color blanco. En la figura 10 se
presenta el montaje de uno de los 3 acondicionadores de señal construidos.
Figura 10. Tarjeta para acondicionamiento de señal de sensores CNY70.
En la parte inferior de la figura 10 se observan 4 tiras de pines, en las cuales se conectan los cables de los
sensores CNY70. En la parte superior se encuentra una tira de pines, por la cual salen las señales digitales de los
sensores. A los costados de los amplificadores LM358 se pueden observar los presets montados para calibrar cada
uno de los sensores.
Interfaz de Usuario
La interfaz tiene la tarea de calcular los resultados de los experimentos e inmediatamente presentarlos de forma
gráfica a los usuarios para que estos los interpreten con facilidad. Básicamente, la interfaz se encarga de recibir, por
puerto serial, diez valores de tiempo provenientes de la tarjeta de adquisición de datos. Enseguida, con estos valores
y las distancias de separación entre cada uno de los sensores como datos constantes, la interfaz realiza el cálculo
tanto de velocidades como aceleraciones medias, las cuales pueden ser consideradas como velocidades y
aceleraciones instantáneas debido a que los intervalos de tiempo son muy pequeños. Debido a la naturaleza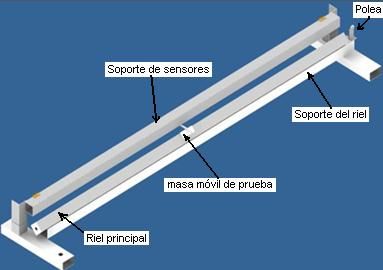
29
experimental de los datos, la interfaz de usuario se encarga de realizar una regresión por mínimos cuadrados para
obtener las funciones de desplazamiento, velocidad y aceleración que mejor describen el movimiento realizado por la
masa móvil de prueba.
Mediante la regresión lineal por mínimos cuadrados se determinan los coeficientes de la ecuación de la recta que
mejor se ajustan al conjunto de datos introducido. Dichos coeficientes se determinan mediante las siguientes
ecuaciones simultáneas (Chapra, S. y Canale, R., 2004):
ec. 10
Los coeficientes de la regresión polinomial de segundo grado se determinan mediante el siguiente sistema de
ecuaciones (Chapra, S. y Canale, R., 2004):
ec. 11
Para el caso del movimiento tipo MRU la interfaz realiza regresiones lineales para obtener las funciones de
desplazamiento, velocidad y aceleración; en tanto que para el caso de movimiento tipo MRUA la interfaz realiza una
regresión polinomial de segundo grado para obtener la función de desplazamiento y realiza regresiones lineales para
obtener las funciones de velocidad y aceleración. Enseguida, la interfaz presenta las gráficas de desplazamiento-
tiempo, velocidad-tiempo y aceleración-tiempo; así como las correspondientes funciones obtenidas. Por último, los
usuarios pueden guardar las imágenes de las gráficas obtenidas en formato “.bmp” y guardar los datos en un archivo
de Excel, si así lo desean. En la figura 11 se presenta el diagrama de flujo que resume la operación de la interfaz de
usuario.
Figura 11. Diagrama de flujo del funcionamiento de la interfaz de usuario.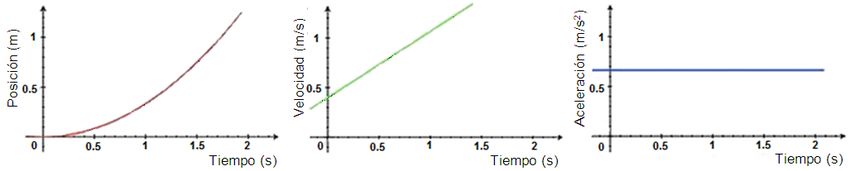
30
La interfaz fue programada empleando el lenguaje de programación de Matlab, ya que este cuenta con librerías
para graficar muy útiles y de fácil implementación. En la figura 12 se presenta la ventana principal de la interfaz de
usuario.
Figura 12. Interfaz de usuario programada en Matlab.
Resultados y discusión
Para la realización de los experimentos, las superficies de contacto entre el riel y la masa móvil de prueba fueron
pulidas para ayudar a disminuir la fricción entre estas. Enseguida se presentan ejemplos de los resultados obtenidos
para los tres casos analizados en el prototipo riel de aire.
Prueba de velocidad constante
En la figura 13 se muestran las gráficas obtenidas por la interfaz de usuario para una prueba de velocidad
constante. En ellas se pueden apreciar también las funciones obtenidas por las regresiones lineales por mínimos
cuadrados realizadas sobre cada uno de los conjuntos de datos. Además, es clara la gran semejanza con las gráficas
presentadas en la figura 2 para el MRU, tal como se esperaba.
Figura 13. Ejemplo de prueba de velocidad constante.
La pendiente de la recta en la gráfica de desplazamiento-tiempo indica el valor de la velocidad instantánea, la
cual es . En la gráfica de velocidad-tiempo la recta obtenida es la función
. Se observa entonces que la velocidad instantánea de la primera gráfica difiere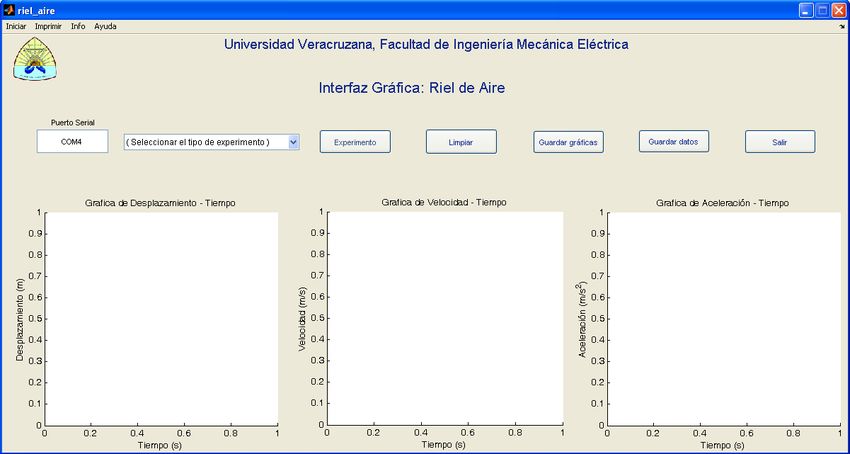
31
únicamente en un 2.1% con respecto del valor de velocidad inicial en la segunda gráfica. Además, el valor de la
aceleración obtenida es muy cercana a cero ( ), la cual concuerda con la recta mostrada en la gráfica de
aceleración-tiempo. Es claro que la fricción entre las superficies del riel de aire y la masa de prueba no se puede
eliminar por completo, sin embargo, sí se consiguió una gran reducción de la misma; lo cual se comprueba al
calcular el coeficiente de fricción entre las superficies de contacto. En la figura 14 se muestra el diagrama de cuerpo
libre de la masa móvil, considerando fricción entre las superficies de contacto, el cual se convierte en un movimiento
tipo MRUA.
Figura 14. Diagrama de cuerpo libre para una masa en movimiento rectilíneo uniforme.
La ecuación para calcular el coeficiente de fricción entre las superficies de contacto es (Serway, R., 1999):
ec. 12
Considerando el valor de la aceleración de la gravedad como , para Ciudad Mendoza, Ver., según
(MetAs, 2011), se tiene:
, el cual es un valor muy pequeño comparado con el coeficiente de fricción
cinético para superficies aluminio-aluminio que es 0.12 (Coca, P., 2004). Se logró reducir el coeficiente de fricción
hasta un 99.6%.
Prueba de aceleración constante por plano inclinado
En la figura 15 se presentan las gráficas obtenidas en una prueba de aceleración constante de la masa móvil de
prueba debido a un plano inclinado a 1.29º con respecto de la horizontal. Es posible apreciar las funciones obtenidas
por la interfaz de usuario. Nuevamente se nota la gran semejanza con las gráficas presentadas para el MRUA en la
figura 4.
Figura 15. Ejemplo de prueba de aceleración constante debido a un plano inclinado a 1.29º.
En la gráfica de desplazamiento-tiempo, la función de desplazamiento encontrada por la interfaz de usuario es
como se describió en la ecuación 9:
. Por lo tanto, la aceleración es
.
En la gráfica de velocidad-tiempo, la función es:
. La aceleración obtenida es .32
En la gráfica de aceleración-tiempo, la pendiente de se aproxima bastante a cero, mientras que el valor
de la aceleración inicial es .
Es notable la manera en que los tres valores de aceleración obtenidos por las funciones son muy cercanos, con la
diferencia máxima de un 5%. De estos tres valores de aceleración, el que se considera más acertado es el obtenido en
la función de desplazamiento ( ), pues la gráfica de desplazamiento-tiempo es la que se obtiene
directamente con los datos de tiempo recibidos. Los datos de velocidad y aceleración no son medidos directamente,
por ello presentan una mayor incertidumbre al derivarse de los datos de desplazamiento y tiempo.
Ahora, es importante conocer como el valor de aceleración experimental difiere del valor teórico, donde la
fricción es nula. Utilizando la ecuación 5, se obtiene el valor de aceleración teórico para un plano inclinado a 1.29º:
Nuevamente, es claro que la fricción entre las superficies de contacto produce una menor aceleración con
respecto del valor teórico, donde no existe la fricción. En la figura 16 se muestra el diagrama de cuerpo libre de la
masa móvil sobre un plano inclinado, considerando fricción entre las superficies de contacto.
Figura 16. Diagrama de cuerpo libre para una masa móvil sobre un plano inclinado con fricción.
La ecuación para calcular el coeficiente de fricción entre las superficies de contacto es (Serway, R., 1999):
ec. 13
El coeficiente de fricción obtenido es mayor que para el caso de la prueba con velocidad constante. Esto es así
porque con aceleración constante, la masa de prueba va adquiriendo mayor velocidad. En este caso, el coeficiente de
fricción se redujo hasta un 98.2%.
Prueba de aceleración constante por aplicación de fuerza externa
En la figura 17 se presentan las gráficas de una prueba de aceleración constante de una masa móvil mediante la
aplicación de una fuerza externa, a través de una pesa conectada mediante un arreglo de hilo y polea.
Figura 17. Ejemplo de prueba de aceleración constante debido a una fuerza externa.33
Las condiciones en las que se obtuvieron estas gráficas son las siguientes: la masa del móvil de prueba es
y la masa de la pesa es , las cuales fueron medidas en una balanza analítica.
La función de desplazamiento encontrada es:
. Por lo tanto, la aceleración es
.
En la gráfica de velocidad-tiempo, la función es:
. La aceleración obtenida es .
En la gráfica de aceleración-tiempo, la pendiente de se aproxima bastante a cero, mientras que el valor
de la aceleración inicial es . De la misma forma que en caso anterior, el valor de aceleración a utilizar
es .
El valor teórico de la aceleración, en superficies sin fricción, para este caso se calcula mediante la ecuación 6:
Nuevamente, la aceleración experimental es menor al valor teórico. En la figura 18 se presenta el diagrama de
cuerpo libre de la masa móvil sujeta a una fuerza constante, considerando fricción entre las superficies de contacto.
Figura 18. Diagrama de cuerpo libre para una masa móvil sometida a la acción de una fuerza constante.
La ecuación para calcular el coeficiente de fricción para este arreglo es (Serway, R., 1999):
ec. 14
Tanto la polea como el hilo empleados en el experimento son de Nylon, por ello el coeficiente de fricción
cinético en la polea es (Groover, M., 1997) y el ángulo de contacto entre hilo y polea es .
Este coeficiente de fricción es el mayor de los tres casos presentados debido a que existen 2 fuentes de fricción en
el arreglo experimental. Sin embargo, este valor todavía es muy pequeño ya que la fricción se redujo hasta un 93.3%.
Más resultados de los experimentos realizados en el riel de aire se encuentran en (Sánchez, C. y Schivre, A.,
2011). Por último, en la figura 19 se presenta una fotografía del riel de aire desarrollado en este proyecto.
Figura 19. Riel de aire y sistema de adquisición de datos.34
Conclusiones
Se presentó un dispositivo para la demostración de la primera y segunda leyes de Newton, se analizaron los
resultados de tres experimentos y en cada uno de ellos se demostró el buen desempeño del sistema. El riel de aire
cumple con el objetivo de reducir en grandes proporciones la fricción entre las superficies de contacto aluminio-
aluminio, la cual estuvo por encima del 90% en todos los casos. Cualitativamente, también se observó que todas las
gráficas obtenidas son similares a sus contrapartes teóricas.
El dispositivo riel de aire permite a los estudiantes visualizar de manera experimental la primera y segunda leyes
de Newton, obteniendo de manera inmediata las gráficas y funciones de desplazamiento, velocidad y aceleración,
mismas que les permitirán analizar y asimilar más rápidamente los conceptos descritos por estas importantes leyes de
la mecánica clásica.
Referencias
Chapra, S. y Canale, R., Métodos numéricos para ingenieros con programas de aplicación, Cuarta edición, Mc Graw
Hill, 2004, 969pp.
Coca, P., Manual del Aluminio, Volumen 1, Segunda edición, Reverté, 2004, 555pp.
Groover, M., Fundamentos de manufactura moderna: Materiales, procesos y sistemas, Pearson Educación, 1997,
1062pp.
MetAs (2006). Utilerías de metrología – cálculo de la aceleración de la gravedad local. Obtenido el 16 de Marzo de
2011 desde http://www.metas.com.mx/utilerias/calculoacelgravedad.php
Resnick, R., et. al., Física, Vol. 1, Cuarta edición, CECSA, 2002, 566pp.
Sánchez, C. y Schivre, A., Diseño y construcción de un riel de aire para la demostración de las leyes de Newton,
trabajo práctico educativo de licenciatura, Facultad de ingeniería mecánica eléctrica, Universidad Veracruzana,
Ciudad Mendoza, Veracruz, México, 226pp, 2011.
Serway, R., Física, Tomo 1, Cuarta edición, Mc Graw Hill, 1999, 645pp.
Notas biográficas
El M.C. Jesús Medina Cervantes es profesor de tiempo completo adscrito a la Facultad de Ingeniería, Campus
Ciudad Mendoza, Universidad Veracruzana. Es ingeniero mecánico egresado del Instituto Tecnológico de Orizaba
en 1998 y en 2002 obtuvo el grado de Maestría en Ingeniería Mecánica en el Centro Nacional de Investigación y
Desarrollo Tecnológico (CENIDET). Actualmente es coordinador de Vinculación, coordinador del Programa de
tutorías y miembro activo del Cuerpo Académico “Investigación en Ingeniería Aplicada” UV CA – 318.
El Dr. Rubén Villafuerte Díaz es profesor de tiempo completo adscrito a la Facultad de Ingeniería, Campus
Ciudad Mendoza, Universidad Veracruzana. Es ingeniero industrial electricista, egresado del Instituto Tecnológico
de Morelia en 1979. Realizó estudios de maestría y doctorado en el área de Ingeniería Eléctrica en el Instituto
Politécnico Nacional, recibiendo los grados correspondientes en 1988 y 1993, respectivamente. Actualmente es
miembro activo del Cuerpo Académico “Investigación en Ingeniería Aplicada” UV CA – 318.
El Dr. Edgar Mejía Sánchez es profesor de tiempo completo adscrito a la Facultad de Ingeniería, Campus
Ciudad Mendoza, Universidad Veracruzana. Es ingeniero electromecánico, egresado del Instituto Tecnológico de
Apizaco en 1996 y en 2004 obtuvo el grado de Maestría en Diseño Mecánico en el Centro Nacional de Investigación
y Desarrollo Tecnológico (CENIDET). En 2009 obtuvo el grado de doctor en Ingeniería y Ciencias Aplicadas de la
Universidad Autónoma del Estado de Morelos. Actualmente es miembro activo del Cuerpo Académico
“Investigación en Ingeniería Aplicada” UV CA – 318.También puede leer