Modelado dinámico de robots paralelos considerando sensórica redundante
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación
Modelado dinámico de robots paralelos considerando sensórica
redundante
Asier Zubizarreta, Itziar Cabanes, Eva Portillo, Darío Orive, Marga Marcos
Depto. Ingeniería de Sistemas y Automática Universidad del País Vasco EHU/UPV
asier_zubizarreta@ehu.es
Resumen control basadas en modelo, ha sido objeto de estu-
dio de pocos autores, debido, principalmente, a la
El modelado dinámico de robots paralelos es una complejidad de la formulación. En este artículo,
tarea compleja debido a los múltiples lazos cin- se aborda la problemática relacionada con la ob-
emáticos de estas estructuras. Las estrategias tención del modelo dinámico de estos robots.
propuestas por diversos autores no obtienen, en
En robótica serie, la formulación Lagrangiana y la
general, el modelo de forma estructurada y com-
de Newton-Euler (N-E) [2] han sido extensamente
pacta y en ningún caso consideran la posibili-
utilizadas para calcular el modelo dinámico, cuya
dad de introducir datos de sensores redundantes
forma se presenta en la ecuación (1).
explícitamente en el modelo. En este artículo,
basándose en trabajos anteriores que hacen uso
de la formulación Lagrangiana, la formulación τ = D (q) · q̈ + C (q, q̇) · q̇ + G (q) (1)
de Newton-Euler y el Principio de los Trabajos
Virtuales, se desarrolla una metodología capaz de
Donde τ representa el vector de las fuerzas/pares
obtener el modelo dinámico de robots paralelos de
de los actuadores, q presenta el vector de las n
forma compacta y estructurada, pudiendo consid-
coordenadas articulares actuadas, D es la matriz
erar datos de sensores redundantes explícitamente
simétrica, definida positiva de inercia , C es la
en el modelo.
matriz de coriolis, donde (Ḋ−2C) es antisimétrica
Palabras clave: Modelo Dinámico, Robótica y G es el vector de gravedad.
Paralela, Formulación Lagrangiana
Sin embargo, la obtención de un modelo con carac-
terísticas similares en robótica paralela no es una
tarea fácil, debido a las articulaciones pasivas o
1 Introducción no actuadas. La aparición de éstas en la estruc-
tura incrementa la complejidad de los problemas
En la actualidad, los robots paralelos se han con- cinemático y dinámico. Para evitar estos inconve-
vertido en una alternativa interesante a los tradi- nientes, algunos autores [17], [16] han propuesto
cionales robots serie. Éste tipo de mecanismos la utilización de sensores en algunas articulaciones
está generalmente compuesto por dos o más cade- pasivas para simplificar el problema cinemático e
nas cinemáticas que unen una plataforma móvil incrementar el rendimiento del control.
donde se coloca el elemento terminal a la base Realizando un análisis de los antecedentes bibli-
fija. Esta disposición mecánica permite una mayor ográficos, los autores han propuesto tres métodos
rigidez estructural, además de la posibilidad de principales para la obtención del modelo dinámico:
operar a muy altas velocidades con alta precisión. la formulación Lagrangiana, el uso de la leyes de
Como contrapartida, la complejidad estructural N-E, y el Principio de los Trabajos Virtuales.
de los mecanismos deriva en una cinemática y
dinámica altamente no lineal y acoplada, un es-
pacio de trabajo reducido, singularidades internas 1.1 Formulación de Newton-Euler
y la aparición de articulaciones no actuadas, entre
La formulación de N-E requiere la definición de las
otros problemas [18].
ecuaciones de N-E para cada cuerpo que compone
Con el objetivo de compensar estas desventajas, el mecanismo. De este modo, todas las fuerzas in-
en las últimos 2 décadas se ha realizado un gran ternas y externas actuando sobre el mecanismo
esfuerzo investigador. La mayor parte de los tra- son calculadas, generando un sistema de ecua-
bajos en este campo se centran en la resolución ciones de gran dimensión. La mayoría de los au-
de la cinemática de estos mecanismos, su análisis tores han aplicado directamente este método a
de singularidades y su síntesis. Sin embargo, el plataformas paralelas específicas, especialmente el
modelado dinámico, necesario para estrategias de Hexápodo o la plataforma Gough [6, 7, 21].Dado que la mayoría de los mecanismos parale- Nakamura&Godoussi τ = W T · τred
los está compuesto por una plataforma móvil y Murray&Lovell τ = GT τred
un grupo de cadenas serie uniendo ésta a la base, Ghorbel, et al τ = ρ(q)T · τred
una estrategia adoptada por numerosos autores ha
sido la de dividir el mecanismo en estos dos subsis- Tabla 1: Matrices de transformación para Modelos
temas. De este modo, la mayoría de los métodos Reducidos
calculan el modelo dinámico de cada uno de los
subsistemas, considerando las fuerzas de reacción
entre ambos, y en un paso posterior, unen ambos tre el modelo dinámico del sistema libre o reducido
utilizando diversas técnicas [5, 12, 13, 14]. Una y el sistema sometido a restricciones (el robot par-
contribución destacada es [1], donde Angeles pro- alelo). Los métodos propuestos por Nakamura
pone el uso del Complemento Ortonormal Natural y Godoussi [20], Murray y Lovell [19] y Ghorbel
(NOC) para proyectar el torsor cinemático del sis- [9],et al. reducen esta relación a una matriz, tal
tema en el espacio articular actuado. como se puede observar en la tabla 1.
Es posible demostrar que las tres matrices de la
1.2 Formulación de Lagrange tabla 1 son equivalentes y que pueden ser definidas
como una única matriz de transformación T cuya
La formulación Lagrangiana es una aproximación traspuesta relaciona el modelo reducido τred y el
energética que permite, con una correcta elección real τ , tal y como se puede ver en (2).
de las coordenadas generalizadas del sistema, evi-
tar el cálculo de las fuerzas de reacción internas
del mecanismo. En robótica paralela, debido a " #
I I
que la relación entre las diversas coordenadas no T = ∂qr
= ∂qp = ∈ Rna +np ×na
se puede resolver, en general, de forma analítica,
∂qa
∂qa
−Jq−1
p
· Jqa
se utiliza la formulación de Lagrange con multi-
plicadores de Lagrange [15]. Los multiplicadores τ = T T · τred
de Lagrange permiten definir la dinámica del sis- q̇red = T · q̇a
tema utilizando un conjunto de coordenadas gen- (2)
eralizadas redundantes e incluir implícitamente las
donde q = qa es el conjunto de articulaciones acti-
relaciones entre estas coordenadas. Al igual que
vas del mecanismo, de dimensión na , qp es el con-
en el caso de la aproximación de N-E, algunos au-
junto de np parámetros pasivos del mecanismo ,
tores han considerado la separación del mecanismo T
en dos subsistemas para simplificar el cálculo del qred = qa qp define el conjunto de coorde-
modelo. Éste es el caso de Bhattacharya, et al. nadas asociadas al modelo reducido, σ(qred ) = 0
[3, 4], que calculan dos sistemas de ecuaciones de representan las ecuaciones de cierre que relacionan
Lagrange, uno para cada subsistema, y los com- las coordenadas articulares activas y los parámet-
∂σ ∂σ
binan utilizando la matriz Jacobiana del robot, ros pasivos y Jqa = ∂q a
y Jqp = ∂q p
definen las
obteniendo así el modelo completo del robot. matrices Jacobiana que incluyen implícitamente
las restricciones del sistema.
1.3 Principio de los Trabajos Virtuales En general, estas aproximaciones descomponen el
robot paralelo en un conjunto de robots series,
Actualmente, una de las aproximaciones más pop- y utilizan la matriz de transformación T para
ulares para obtener el modelo dinámico de los obtener el modelo del robot paralelo a partir de
robots paralelos es el uso del Principio de los Tra- su modelo reducido (modelo del conjunto de cade-
bajos Virtuales, que, de forma similar a la for- nas serie).
mulación Lagrangiana, es una aproximación en-
ergética. Al igual que en los métodos anteriores, El uso de modelos reducidos proporciona un
la mayoría de los autores ha aplicado de forma di- método sencillo para el cálculo del modelo
recta el principio para obtener el modelo de robots dinámico de robots paralelos cuando no existe
específicos [23, 24, 25, 26]. plataforma móvil. Sin embargo, en el caso general,
la plataforma móvil tiene que ser unida a una de
Otra corriente no menos importante es aquella que las cadenas serie, incrementando la complejidad
propone la combinación de la utilización de los del problema.
modelos reducidos y el Principio de los Trabajos
Virtuales [11, 10, 8, 9, 20, 19]. Este enfoque con-
sidera a los robots paralelos como un conjunto de Las tres estrategias analizadas proporcionan una
elementos libres, denominado sistema libre y un variedad de métodos para abordar el modelado
conjunto de restricciones. Los trabajos en este dinámico de robots paralelos. Sin embargo,
campo se centran en la obtención de la relación en- ninguna considera la posibilidad de incluir explíci-Sea qa el conjunto de articulaciones activas del
mecanismo, de dimensión na = n, qp el conjunto
de np articulaciones pasivas no sensorizadas y qs
el conjunto de ns articulaciones pasivas sensoriza-
dos. El conjunto de coordenadas de control se
T
definirá tal que q = qa qs y el conjunto
de nr = na + np + ns coordenadas generalizadas
T
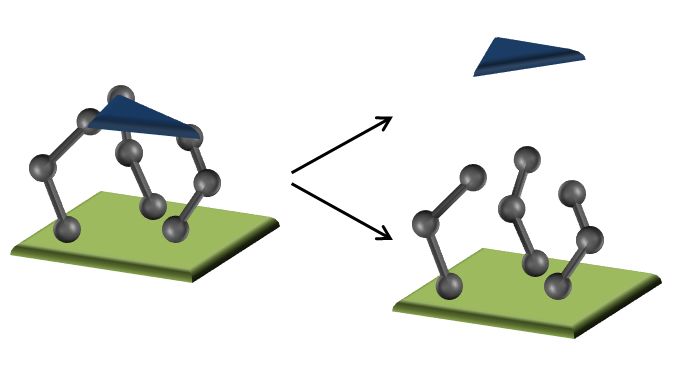
Figura 1: Subsistemas serie y plataforma móvil como qr = q qp . Sea x el vector de co-
ordenadas cartesianas del elemento terminal, de
dimensión 6, y xI el conjunto de n coordenadas
tamente datos de sensores colocados en articula-
independientes de x.
ciones pasivas con el objetivo de mejorar los es-
quemas de control basados en modelo. A continuación, se describen brevemente los pasos
a seguir para la obtención del modelo dinámico:
La metodología propuesta en este trabajo se basa
en tres contribuciones de otros autores:
2.1 Ecuaciones de cierre del mecanismo
• La utilización de la matriz de transforma- Inicialmente hay que definir las ecuaciones de
ción definida en (2) que relaciona el mod- cierre que relacionan las diferentes coordenadas
elo dinámico del robot y su modelo reducido entre si. Estas ecuaciones caracterizan las re-
[11, 10, 8, 9, 20, 19]. stricciones del mecanismo y permiten resolver el
• Separación del mecanismo en dos subsis- problema de posición. Existen tres relaciones a
temas: plataforma móvil y subsistema serie obtener:
[13, 14, 1] (Fig. 1).
• La relación entre las coordenadas cartesianas
• Aplicación de la formulación Lagrangiana con x y las coordenadas articulares activas inde-
multiplicadores de Lagrange a cada subsis- pendientes qa :
tema de forma independiente [3, 4]. Esta for-
mulación permite al diseñador el elegir las co- φi (x, qa ) = 0, i = 1, . . . n (3)
ordenadas que definirán el modelo dinámico,
lo que la hace idónea para la inclusión de • La relación entre x y qr :
datos redundantes.
Γi (x, qr ) = 0 → x = fi (qr ), i = 1, . . . n (4)
Basándose en estas tres ideas, se propone
una metodología para la obtención del modelo • La relación entre las coordenadas articulares
dinámico de robots paralelos, donde es posible in- activas qa y las coordenadas articulares pa-
cluir información de sensórica redundante. El ob- sivas no sensorizadas qp y sensorizadas qs :
jetivo de este modelo redundante es el de ser im- En general, es más fácil obtener estas ecua-
plementado en esquemas avanzados de control que ciones de cierre en términos de las coorde-
permitan mejorar la precisión y el rendimiento del nadas cartesianas y las articulares activas:
robot.
fs (qa , x, qs ) = 0
(5)
A continuación se exponen los pasos a seguir para fp (qa , x, qs ) = 0
obtener el modelo dinámico de un robot paralelo
genérico. Inicialmente, se considerarán ciertos 2.2 Problema de posición
parámetros pasivos sensorizados explícitamente en
el modelo, mientras que en un segundo caso, se Utilizando las ecuaciones de cierre definidas en (3)
particulariza para el caso del modelo sólo en fun- y (4) se puede definir el problema de posición di-
ción de las coordenadas articulares actuadas. recto e inverso. Utilizando (5), las posiciones de
los parámetros pasivos pueden ser calculadas.
2 Metodología para la obtención
2.3 Problema de velocidad
del modelo dinámico
considerando sensórica El cálculo del problema de velocidad y las Jaco-
redundante bianas que lo caracterizan es un paso muy impor-
tante para el cálculo del modelo dinámico. Las
Supóngase un mecanismo no redundante con n = ecuaciones de velocidad pueden ser directamente
na grados de libertad, cuya plataforma móvil está derivadas de las ecuaciones de cierre planteadas en
unida a la base por n cadenas serie. la sección 2.1, lo que es cómodo en robots simplesy planares. Otra alternativa es la de definir di- • Matriz de transformación Tq
rectamente las ecuaciones vectoriales de velocidad Esta matriz de transformación relaciona las
del mecanismo, que es más adecuado en robots velocidades de las coordenadas de control q̇ y
complejos. las velocidades de las coordenadas articulares
De las ecuaciones de velocidad del mecanismo se generalizadas del subsistema serie q̇r . Esta
obtienen las matrices Jacobianas, que incluyen expresión se utilizará para proyectar el mod-
implícitamente las restricciones del mecanismo y elo dinámico en el espacio de coordenadas de
serán utilizadas en el modelo dinámico de éste. control asociado a q̇.
Por lo tanto, el objetivo de este paso es la obten-
ción de las siguientes matrices :
q̇r = I(na +ns )×(na +ns ) Jqp /q q̇ = Tq · q̇
• Matriz Jacobiana del robot JR : (9)
∂q
Queda definida como, Donde Jqp /q = ∂qp es la matriz Jacobiana
que relaciona las velocidades de las coorde-
nadas de control q̇ y las velocidades de las
v = JR (x, qa ) · q̇a (6)
|{z} articulaciones pasivas no sensorizadas q̇p .
6×n
Donde v = [ ṗTc ω T ]T es la velocidad 2.4 Problema de aceleración
cartesiana del elemento terminal, que consta
Las ecuaciones de aceleración se obtienen diferen-
de una velocidad de traslación lineal ṗc y una
ciando las ecuaciones de velocidad (6), (8) y (9),
velocidad angular ω. Nótese que v 6= ẋ en el
obteniendo:
caso general, tal como se detalla en [2].
Esta expresión se puede obtener operando las
ecuaciones de velocidad o diferenciando (3) y a = JR · q̈a + J˙R · q̇a (10)
operando la expresión.
• Matriz Jacobiana de Restricción JC : d
q̈r = (T · q̇a ) = T q̈a + Ṫ q̇a (11)
dt
Relaciona la velocidad de las coordenadas
cartesianas de la plataforma móvil v y las ve-
locidades de las coordenadas articulares gen- d
q̈r = (Tq · q̇) = Tq q̈ + Ṫq q̇ (12)
eralizadas de los subsistemas serie q̇r : dt
donde, a = v̇ es la aceleración cartesiana
del ele-
mento terminal, Ṫ = 0n×n J˙s J˙p y
v= JC (x, qr )q̇r (7)
|{z}
6×(na +ns +np )
Ṫq = 0(na +ns )×(na +ns ) J˙qp /q .
Esta expresión se puede obtener diferen-
ciando (4) de forma similar al proceso de ob- 2.5 Ecuación Lagrangiana
tención de JR o operando las ecuaciones vec-
Una vez que se han obtenido todas las rela-
toriales de velocidad.
ciones cinemáticas (secciones 2.1 a 2.4) el mod-
• Matriz de transformación T : elo dinámico del robot puede ser calculado uti-
lizando la formulación Lagrangiana con multipli-
Esta matriz relaciona las articulaciones acti- cadores. Para ello, el primer paso es considerar
vas q̇a y las coordenadas articulares general- el mecanismo como la suma de los dos subsis-
izadas del subsistema serie q̇r : temas: plataforma móvil y subsistemas serie. De
este modo, se calculará la ecuación Lagrangiana
de cada subsistema en función de las coordenadas
In×n Js Jp
q̇r = |{z} |{z} q̇a = T q̇a (8) naturales de cada uno. La función Lagrangiana de
ns ×na np ×na
la plataforma móvil Lp estará definida en función
de las coordenadas cartesianas x, mientras que la
donde Js and Jp son las matrices jacobianas función Lagrangiana asociada al subsistema serie
que relacionan las coordenadas articulares pa- Ls estará definido en función de las coordenadas
sivas no sensorizadas qp y sensorizadas qs articulares generalizadas qr .
y las activas qa . Estas matrices se pueden
obtener diferenciando (5) o a partir de las
ecuaciones de velocidad vectorial. L = Ls (qr , q̇r ) + Lp (x, ẋ) (13)2.6 Ecuaciones diferenciales de los
subsistemas τr = D0 (x, qr )q̈r + C 0 (x, qr , ẋ, q̇r )q̇r + G0 (x, qr ) + Fext
Una vez definida la ecuación Lagrangiana, se pro- 0
D (x, qr ) = Dr −JCT Dx Ax
cede a derivar las ecuaciones diferenciales aso-
0
C (x, qr , ẋ, q̇r ) = Cr − JCT (Dx Bx + Cx JC )
ciadas a cada subsistema. Dado que los dos G0 (x, qr ) = Gr − JCT Gx
subsistemas están definidos en diferentes coorde-
T
Fext = JPr · Qx
nadas se pueden diferenciar dos conjuntos de ecua- (17)
ciones diferenciales, uno por cada sistema. Adi-
0 0 nr ×nr 0 nr
cionalmente, para modelar las restricciones que donde D , C ∈ R y τr , G , Fext ∈ R
unen ambos subsistemas, se introducen n multi- Para proyectar los pares τr de dimensión nr asoci-
plicadores de Lagrange: ados a qr en el espacio actuado qa de dimensión n
se requiere el uso de la matriz de transformación
• Ecuaciones diferenciales asociada con el sub- T (8). Adicionalmente, utilizando las relaciones
sistema serie j = 1, . . . nr cinemáticas (9) y (12) se puede definir el modelo
en función de las coordenadas de control q:
n τ = D(x, qr )q̈ + C(x, qr , ẋ, q̇r )q̇ + G(x, qr ) + Fe
d ∂Ls ∂Ls X ∂Γi (x, qr )
− = λi · + τr j
dt ∂ q̇rj ∂qrj i=1
∂qrj
D(x, qr ) = T T · D0 · Tq
(14) C(x, qr ) = T · C · Tq + D0 · Ṫq
0
T
donde τrj representa la fuerza/par virtual G(x, qr ) = T T · G0
Fe = T T · Fext
asociado a qr .
(18)
• Ecuaciones diferenciales asociadas a la
plataforma móvil k = 1, . . . n La ecuación (18) define el modelo dinámico del
robot considerando tanto articulaciones activas
n
como articulaciones pasivas sensorizadas. Es por
d ∂Lp ∂Lp X ∂Γi (x, qr ) lo tanto un modelo redundante y las matrices no
− = λi · + Qxk
dt ∂ ẋk ∂xk i=1
∂xk son cuadradas, de forma que se requieren realizar
(15) operaciones adicionales si se desa obtener el prob-
lema dinámico directo. Sin embargo, la obten-
donde Qxk son las fuerzas/pares externos
ción del modelo dinámico inverso es suficiente para
aplicados en el elemento terminal.
aplicar estrategias de control basadas en modelo.
Agrupando los términos de las ecuaciones diferen-
ciales en matrices y considerando que los multi- 3 Consideraciones Adicionales
plicadores de Lagrange, en este caso, están rela-
cionados con las fuerzas internas que unen am- El obtener el modelo dinámico en términos de úni-
bos subsistemas, es posible obtener un sistema de camente las coordenadas articulares activas es un
ecuaciones tal que [3]:
caso particular de la metodología propuesta en la
Dr (qr )q̈r + Cr (qr , q̇r )q̇ + Gr (qr ) = JCT · fc + τr sección 2. En este caso, qs es un vector vacío y
resulta que q = qa , por lo que T = Tq .
Dx (x)a + C(x, ẋ)v + G(x) = fc + Qx
(16) El modelo tiene la misma forma que el definido en
(18), pero debido a que las coordenadas de con-
donde Dr , Dx representan las matrices de inercia, trol no son redundantes, la matriz de inercia es
Cr los términos de coriolis, Gr , Gx los vectores de cuadrada e invertible.
gravedad de cada subsistema. τr es el vector de
las fuerzas/pares virtuales τrj asociados a qr . Qx Adicionalmente, el método propuesto en las sec-
es el vector de fuerzas/pares externos aplicados en ción 2 es válido para el caso general de robot
la plataforma móvil asociados a Qxk . fc modela paralelo donde existe plataforma móvil como ele-
las fuerzas internas de reacción entre la plataforma mento terminal. En ciertos casos, esta plataforma
y las cadenas serie definidas en el sistema de refer- no existe. En este caso, la metodología es válida
encia cartesiano. La matriz JC proyecta este valor y se considera la plataforma móvil como un punto
en el espacio asociado a qr . sin masa ni inercia.
Por otro lado, el método pretende ser genérico y
2.7 Obtención del Modelo dinámico no optimiza el coste computacional, pudiendo re-
querir un gran número de cálculos matriciales.
El modelo dinámico puede ser obtenido en térmi-
nos de qr utilizando las relaciones (7) y (10) y Por último, en el caso de manipuladores simples,
eliminando las fuerzas internas de la ecuación: como el caso de robots planares, no es necesarioutilizar las 6 coordenadas de x y se pueden elim- 4.1 Modelado dinámico redundante del
inar los términos nulos. Adicionalmente, en el robot 3RRR
caso planar y en robots de movimiento SCARA
se cumple que ẋ = v, lo que simplifica bastante el Se consideraran las articulaciones pasivas qpi , aso-
problema dinámico. ciadas a los puntos Bi del robot, sensorizadas, tal
T
que qs = qp1 qp2 qp3 y qr = q.
A continuación, se siguen las pautas propuestas en
4 Aplicación al robot planar 3RRR la sección 2 para la obtención del modelo dinámico
del robot 3RRR:
El 3RRR es un robot planar de 3 gdl compuesto 4.1.1 Ecuaciones de cierre
por una plataforma móvil y tres cadenas serie de
dos grados de libertad que la unen a la base (Fig. Basándose en la Fig. 2, se obtienen dos conjuntos
2). de ecuaciones vectoriales de cierre :
~ = OA
OP ~ i + Ai~Bi + B~i Ci + C~i P (19)
0 ~ i + Ai~Bi + B~i Ci + Ci C
= OA ~ i+1
(20)
−Bi+1~Ci+1 − Ai+1~Bi+1 − OA~i+1
donde, i = 1, 2, 3 y la condición de contorno i =
3 → i + 1 = 1.
Operando estas ecuaciones de cierre se puede
obtener la ecuación que relaciona qa y x:
φi (x, qa ) = 0 = −li2 + (x − OAxi − Li cos(qai )−
2
−di cos(θz + φi )) + (y − OAyi −
2
−Li sin qai − di sin(θz + φi ))
(21)
Donde i = 1, 2, 3 y φi es un valor constante que
Figura 2: Robot Paralelo 3RRR
depende de la geometría de la plataforma.
La relación entre qr = q y x:
Sea P (x, y) la posición del elemento terminal en el
plano y θz su orientación. Sea O el origen del sis-
tema de referencia fijo y Ai , Bi , Ci , con i = 1, 2, 3, Γi (x, q) = 0 = −(OA2xi + OA2yi ) + (x − Li cos(qai )−
las articulaciones de rotación de cada cadena se- 2
− li cos(qai + qpi ) − di cos(θz + φi )) +
rie que une la plataforma móvil a la base. Los + (y − Li sin qai − li sin(qai + qpi )−
parámetros del mecanismo se definen en la tabla 2
−di sin(θz + φi )) , i = 1, 2, 3
2. (22)
T
Sean qa = qa1 qa2 qa3 el vector Para obtener la relación entre qs = qp y qa se
de coordenadas articulares activas, qp = utiliza la ecuación vectorial (20):
T
qp1 qp2 qp3 el vector de coordenadas ar-
T
ticulares pasivas y x = x y θz el vector
de coordenadas cartesianas. Nótese que en este fi (qa , qs ) = 0 = −h2i(i+1) + [li cos(qai + qpi )+
caso, el robot es planar y no es necesario definir +Li cos qai + OAxi − OAx(i+1) −
un vector de 6 dimensiones. Adicionalmente se 2
−Li+1 cos qai+1 − li cos(qai+1 + qpi+1 ) +
cumple ẋ = v. + [li sin(qai + qpi ) + Li sin qai +
Para el modelado, se considerarán masas pun- +OAyi − OAy(i+1) − Li+1 sin qai+1
2
tuales concentradas en el centro de masas y la −li sin(qai+1 + qpi+1 ) , i = 1, 2, 3
fricción será despreciada. (23)Elemento Longitud Masa Inercia Centro
de Masas
Ai Bi Li mLi [Izz ]Li lcLi
Ci Ci+1 n li mli [Izz ]li lcli
hi(i+1) = Ci Ci+1
C1 C2 C3 mp [Izz ]p P (x, y)
di = Ci P
Carga - mc [Izz ]c P (x, y)
Sensor - ms [Izz ]s Bi (x, y)
Tabla 2: Parametros del robot paralelo 3RRR
4.1.2 Problema de Posición
Jxa ẍ + Jqa q̈a + J˙qa q̇a + J˙xa ẋ = 0 (28)
El problema de posición directo puede ser calcu-
lado analíticamente utilizando (19). El problema
de posición inverso se calcula a partir de (21). Jx ẍ + Jq q̈ + J˙q q̇ + J˙x ẋ = 0 (29)
Los detalles en la resolución de este problema se
pueden encontrar en [22].
Jqas q̈a + Jqs q̈s + J˙qas q̇a + J˙qs q̇s = 0 (30)
4.1.3 Problema de Velocidad
Para determinar la ecuación de velocidad y las ma-
trices Jacobianas, se derivarán las ecuaciones de q̈ = T q̈a + Ṫ q̇a (31)
cierre (21),(22) y (23).
4.1.5 Ecuación Lagrangiana
De este modo, la matriz Jacobiana del robot que
relaciona ẋ y q̇a : Se considera la separación del robot en dos sub-
sistemas: plataforma móvil y subsistema serie.
La ecuación Lagrangiana de la plataforma Lp se
∂φ(x,qa ) ∂φ(x,qa )
∂x ẋ + ∂qa q̇a = Jxa ẋ + Jqa q̇a define en función de la energía cinética de la
(24) plataforma móvil Kp y su energía potencial Up :
−1
JR = −Jxa Jqa
Kp = 21 ẋT Dx ẋ
La matriz Jacobiana de restricción se calcula
derivando (22):
mp + mc 0 0
Dx = 0 mp + mc 0
∂φ(x,q) ∂φ(x,q)
∂x ẋ + ∂q q̇ = Jx ẋ + Jq q̇ 0 0 c c
[Izz ]p + [Izz ]c
(25)
JC = −Jx−1 · Jq
0
U = mp · g · y = G x · y
p
Para obtener la matriz de transformación T se
0
deriva inicialmente (23):
∂f (qa , qs ) ∂f (qa , qs ) Lp = Kp − Up
q̇a + q̇s = Jqas q̇a + Jqs q̇s
∂qa ∂qs (32)
(26)
Para el subsistema serie, el modelo dinámico de
Utilizando (26) T queda definida como: cada brazo se corresponde a un robot serie de 2
gdl, cuya ecuación Lagrangiana es:
qa
∂
qs P3 h
1
q̇ = ∂q Ls = mLi lc2L + mli L2i + lc2l + 2Li lcli cos qpi
∂qa q̇a = ∂qa q̇a = (27) 2 i=1 i i
c c c
+ L2i + m 2
c Li+ [Izz ]Li + [Izz ]li + [Izz ]si ·iq̇a2i
I3×3 − Jq−1
h
= Jqas q̇a = T · q̇a +
P3 2 c
s
i=1 mli lcli + Li lcli cos qpi + [Izz ]li q̇ai q̇pi
P3 h i
1 2 c 2
4.1.4 Problema de Aceleración + 2 i=1 mli lcli + [Izz ]li q̇pi
P3
− i=1 mLi lcLi + msiiLi + mli Li g sin qai +
Para obtener las ecuaciones de aceleración, se
derivan las ecuaciones de velocidad (25), (24) y − mli lcli g sin (qai + qpi )
(26): (33)Combinando (32) y (33) se obtiene la ecuación coordenadas de control utilizando las expresiones
Lagrangiana de todo el sistema. (25) y (29):
L = Lp + Ls (34)
Dq̈ + C q̇ + G − Fext = τqa
4.1.6 Sistemas de ecuaciones diferenciales
D = T T (Dq + JCT Dx JC )
(39)
C = T T (Cq + JCT Dx J˙C )
Utilizando (34), se aplica la formulación de La-
with
grange con Multiplicadores, siguiendo el proced-
G = T T (Gq + JCT Gx )
imiento descrito en 2.6: Fext = T T JCT Qx
• Ecuaciones diferenciales asociadas a la Donde τqa define los pares o fuerzas a aplicar en
plataforma móvil k = 1, ...3 las articulaciones.
Con esta metodología se obtiene un modelo
d
∂Lp
∂Lp
3
X ∂Γi (x, q) dinámico redundante, que depende de tanto las ar-
− = λi · + Qxk ticulaciones activas como de aquellas pasivas sen-
dt ∂ ẋk ∂xk ∂xk
i=1 sorizadas. Por lo tanto, cuando se emplea dicho
(35) modelo inverso en estrategias de control basado en
Donde [Qxk ] = Qx son las fuerzas/pares ex- modelo, la información redundante se traduce en
ternos aplicados en la plataforma. una mayor precisión y un cntrol más robusto ante
Tras calcular las derivadas parciales de (35) variaciones en los parámetros.
e identificando las matrices de inercia Dx y
gravedad Gx 1 , se obtiene una expresión: 4.2 Modelado dinámico considerando
articulaciones activas
Dx ẍ + Gx − Qx = JxT λ (36)
El proceso de cálculo del modelo considerando
• Ecuaciones diferenciales asociadas al subsis- únicamente articulaciones activas es similar al
tema serie j = 1, . . . 6 planteado en 4.1. Tras resolver el problema cin-
emático completo y definir las ecuaciones La-
grangianas y sus derivadas, se obtienen el sistema
3 de ecuaciones formado por (36) y (38). La elimi-
d ∂Ls ∂Ls X ∂Γi (x, q)
− = λi · + τr j nación de los multiplicadores de Lagrange de dicho
dt ∂ q̇rj ∂qrj i=1
∂qrj sistema se realiza introduciendo la Jacobiana de
(37) restricción JC , para después proyectar el modelo
De forma similar, tras derivar la ecuación La- en el espacio articular actuado premultiplicando
grangiana y agrupar términos, se obtiene: éste por T T (27). Posteriormente, se utilizan las
expresiones cinemáticas (24), (28),(27) y (31) para
definir el modelo en función de las coordenadas ar-
Dq q̈ + Cq q̇ + Gq = τr + JqT λ (38)
ticulares actuadas:
Con lo que queda definido el sistema de ecua-
ciones diferenciales (36),(38) que modela el com-
Dq̈a + C q̇a + G − Fext = τqa
portamiento del sistema.
D = T T (Dq T + JCT Dx JR )
4.1.7 Obtención del Modelo dinámico
˙ ) + J T Dx J˙R )
C = T T (Cq T + Dq (T
with C
T T
Tal y como se ha descrito en la sección 2, para
G = T (Gq + JC Gx )
Fext = T T JCT Qx
obtener el modelo dinámico en términos
T de las co-
ordenadas de control q = qa qs , se han de (40)
aplicar una serie de transformaciones a las ecua-
ciones (36) y (38). Primero, utilizando la matriz
5 Conclusiones
de restricción del robot (25) se eliminan los multi-
plicadores de Lagrange. Posteriormente, el mod-
En este trabajo se ha presentado una metodología
elo es proyectado en el espacio articular actuado
para el cálculo del modelo dinámico de robots par-
utilizando la matriz de transformación T (27) y,
alelos. El método, basado en la formulación de
por último, el modelo se define en función de las
Lagrange, combina las ideas de trabajo previos
1
La matriz de coriolis es nula en el caso planar para crear un método genérico, capaz de definirun modelo en términos de únicamente las artic- of the 34th IEEE Conference on Decision and
ulaciones activas o en términos de las articula- Control, pages 549–542, 1995.
ciones activas y pasivas. La consideración de sen-
sores extra explícitamente en el modelo puede ser [9] F. Ghorbel, O. Chételat, R. Gunawardana,
utilizada en técnicas de control basada en mod- and R. Longchamp. Modeling and set point
elo para obtener un mejor rendimiento de control, control of closed-chain mechanisms: Theory
una mayor robustez ante imprecisiones del mod- and experiment. IEEE Transactions on Con-
elo y una mejora del error de posicionamiento y trol System Technology, 8(5):801–815, 2000.
seguimiento de trayectoria. El método propuesto
[10] F. Ghorbel, O. Chételat, and R. Longchamp.
es sistemático, basado en matrices, que puede ser
A reduced model for constrained rigid bodies
fácilmente aplicado. El método se ilustra con
with application to parallel robots. Proceed-
la obtención del modelo dinámico para el robot
ings ot he IFAC Symposium on Robot Con-
3RRR.
trol, pages 57–62, 1994.
Agradecimientos
[11] R. Gunawardana and F. Ghorbel. Pd con-
Este trabajo ha sido financiado por el Depar- trol of closed-chain mechanical systems: An
tamento de Educación, Universidades e Investi- experimental study. Proceedings of the 5th
gación del Gobierno Vasco (Beca BF106.2R129) IFAC Symposium on Robot Control (SY-
y el Ministerio de Educación y Ciencia, bajo el ROCO’97), pages 79–84, 1997.
proyecto DPI 2006-04003.
[12] H.B. Guo and H.R. Li. Dynamic analysis and
Referencias simulation of a six degree of freedom stewart
platform manipulator. Proceedings of IMechE
[1] J. Angeles. Fundamentals of Robotic Mechan- Part C: J. Mechanical Engineering Science,
ical Systems: Theory, Methods, and Algo- 220:61–72, 2006.
rithms. Springer, 2007.
[13] W. Khalil and S. Guegan. Inverse and direct
[2] A. Barrientos, L.F. Peñín, C. Balaguer, and dynamic modeling of gough-stewart robots.
R. Aracil. Fundamentos de Robótica (2a Edi- IEEE Transactions on Robotics, 20(4):754–
cion). McGraw Hill, 2007. 762, 2004.
[3] S. Bhattacharya, H. Hatwal, and A. Ghosh. [14] W. Khalil and O. Ibrahim. General solution
An on-line parameter estimation scheme for for the dynamic modeling of parallel robots.
generalized stewart platform type parallel Journal of Intelligent Robot Systems, pages
manipulators. Mechanism and Machine The- 19–37, 2007.
ory, 32(1):79–89, 1997.
[15] K.-M. Lee and D. K. Shah. Dynamic analysis
[4] S. Bhattacharya, N. Nenchev, and of a three-degree-of-freedom in-parallel actu-
M. Uchiyama. A recursive formula for ated manipulator. IEEE Journal of Robotics
the inverse ot the inertia matrix of a parallel and Automation, 4(40):361–367, 1988.
manipulator. Mechanism and Machine
Theory, 33(7):957–964, 1998. [16] F. Marquet, O. Company, S. Krut, and
F. Pierrot. Enhancing parallel robots accu-
[5] B. Dasgupta and P. Choudhurry. general
racy with redundant sensors. Proceedings of
strategy based on the newton-euler approach
the 2002 IEEE International Conference on
for the dynamic formulation of parallel ma-
Robotics and Automation, pages 4114–4119,
nipulators. Mechanism and Machine Theory,
2002.
34:801–824, 1999.
[6] B. Dasgupta and T.S. Mruthyunjaya. A [17] J. P. Merlet. Still a long way to go on the
newton-euler formulation for the inverse dy- road for parallel mechanisms. Proceedings of
namics of the stewart platform. Mechanism the ASME 2002 DETC Conference., 2002.
and Machine Theory, 33(8):1135–1152, 1998.
[18] J. P. Merlet. Parallel Robots (Second Edi-
[7] W. Q. D. Do and D. C. H. Yang. Inverse dy- tion). Kluwer, 2006.
namic analysis and simulation of a platform
type of robot. Journal of Robotic Systems, [19] J Murray and G. Lovell. Dynamic model-
5(3):209–227, 1988. ing of closed-chain robotic manipulators and
implications for trajectory control. IEEE
[8] F. Ghorbel. Modeling and pd control of Transactions on Robotics and Automation,
closed-chain mechanical systems. Proceedings 5(4):522–528, 1989.[20] Y. Nakamura and M. Godoussi. Dynamics
computation of closed-link robot mechanisms
with nonredundant and redundant actuators.
IEEE Transactions on Robotics and Automa-
tion, 5(3):294–302, 1989.
[21] S. Riebe and H. Ulbrich. Modelling and on-
line computation of the dynamics of a par-
allel kinematic with six degrees-of-freedom.
Archive of Applied Mechanics, 72:813–829,
2003.
[22] Lung-Wen Tsai. Robot Analysis. Wiley-
Interscience, 1999.
[23] Lung-Wen Tsai. Solving the inverse dynamics
of a stewart-gough manipulator by the prin-
ciple of virtual work. ASME Journal of Me-
chanical Design, 122:3–9, 2000.
[24] J. Wang and C. Gosselin. A new approach
for the dynamic analysis of parallel manipula-
tor. Multibody System Dynamics, 2:317–334,
1998.
[25] Y. Zhiyong, W. Jiang, and M. Jiangping.
Motor-mechanism dynamic model based neu-
ral network optimized ctc control of a high
speed parallel manipulator. Mechatron-
ics, doi:10.1016/j.mechatronics.2007.04.009,
2007.
[26] Z. Zhu, J. Li, Z. Gan, and W. Zhang. Kine-
matic and dynamic modelling for real-time
control of tau parallel robot. Mechanism and
Machine Theory, 40:1051–1067, 2005.También puede leer