TRABAJO COOPERATIVO EN ROBOTS - SEMINARIO "Diseño y construcción de microrrobots"
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación
SEMINARIO “Diseño y construcción de
microrrobots”
TRABAJO
COOPERATIVO EN
ROBOTS
Autor: Luis De Santiago Rodrigo
3º Ingeniería de Telecomunicación
1.-ÍNDICE E INTRODUCCIÓN
Éste trabajo pretende ser una pequeña introducción al mundo de la robótica
cooperativa. La robótica es un parte de la robótica encargada del análisis, estudio y
ejecución de tareas por medios de varios robots que trabajan de forma coordinada. Los
puntos a tratar en éste trabajo son los siguientes:
2.-Robots y trabajo cooperativo
3.-Tipos de control en robots cooperativos.
4.-Tipos de sistemas.
5.-Otras ventajas de robots cooperativos.
6.-Inconvenientes robots cooperativos.
7.-Robots cooperativos y comportamiento animal.
8.-Robótica celular
9.-Enlaces Web de interés.
2.-ROBOTS Y TRABAJO COOPERATIVO.
Actualmente, en el campo de la robótica, se está produciendo un gran desarrollo
en el campo de los robots cooperativos. Algunos problemas son demasiado difíciles de
resolver para un único robot: (empujar una caja, explorar un campo…).
La robótica colectiva busca diseñar sistemas compuestos de varios robots capaces de
resolver problemas conjuntamente. Los robots que forman parte de un sistema multi-
robot son simples en términos de diseño y control, y menos costosos que los sistemas de
un sólo robot especializado. Los sistemas multi-robot están orientados a resolver
problemas en los cuales la participación de un solo robot no es suficiente o resulta ser
muy costosa, en términos de diseño y tiempo, como por ejemplo el transporte de objetos
voluminosos, el manejo de material peligroso, la exploración y cobertura de terreno…
Robots cooperativos fabricados a partir de piezas de LEGO
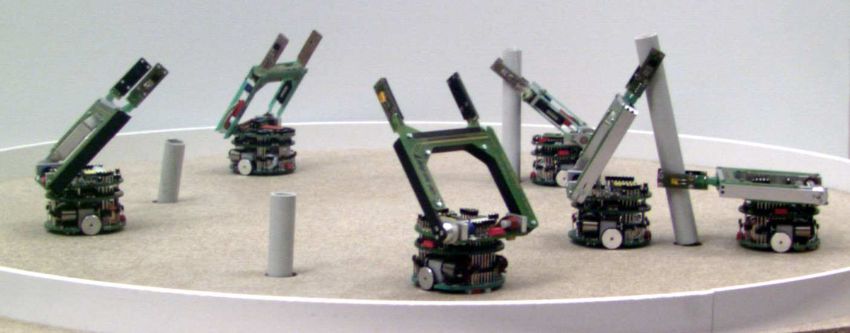
3.-TIPOS DE CONTROL EN ROBOTS COOPERATIVOS Se puede hacer una clasificación preliminar de los sistemas multi-robot en función del tipo de control (toma de decisiones). Control Centralizado: En este tipo de control, tenemos varios robots que dependen de una unidad central. Los robots adquieren datos a través de sus sensores (por ejemplo reconocen un terreno, persiguen una pelota), y toda la información se la envían a la unidad central, que es la encargada de tomar las decisiones. La principal ventaja de éste sistema, es que como la unidad central almacena mucha información, es más eficiente a la hora de obtener soluciones. Cómo desventajas, es que la unidad central estará recibiendo continuamente datos de los otros robots, pudiéndose provocar una congestión al recibir gran cantidad de datos, y ralentizarse la toma de decisiones. Además, si la unidad central falla, o deja de funcionar, deja de funcionar todo el sistema, pues los demás robots pierden la capacidad de decidir. Control Distribuido En éste caso, cada robot decide que hacer por su cuenta, sin recibir órdenes de ninguna otra entidad. Con éste tipo de control el sistema es mucho más dinámico y rápido, pues no es necesario ni el envío ni el almacenamiento de información. Además, si deja de funcionar un robot, todos los demás pueden seguir funcionando independientemente. Es difícil diseñar los algoritmos de programación, porque aunque son muy simples, deben de funcionar correctamente, es decir, es difícil encontrar un algoritmo sencillo que funcione, pero una vez encontrado, es muy fácil de aplicar e implementar. 4.-TIPOS DE SISTEMAS Se puede hacer otra clasificación en función del nivel de comunicación e interacción entre los distintos robots que forman el sistema. Muy acoplados(o colectivos) Todos los individuos tienen su propia inteligencia pero además tienen capacidad de comunicación, y por lo tanto, de cooperación y coordinación. De esta manera se tiene que la inteligencia colectiva es la suma de la inteligencia de cada individuo. Cada robot
debe tener la capacidad de transferir información a otro compañero y tener la suficiente inteligencia para pedir ayuda y coordinar los movimientos con los demás individuos. Por ejemplo, cuando dos robots intentan mover una caja empujándola de uno de sus lados y que se mantenga recta. Los dos robots deben de sincronizar sus velocidades para evitar que la caja se ladee hacia un lado u otro. Son sistemas poco robustos, pues si falla un robot, falla todo el sistema. Poco acoplados (o manadas) Son sistemas en los que los robots funcionan independientemente del resto, sin tener en cuenta los movimientos o decisiones de los demás. No hay una inteligencia central sino que todo el control es distribuido, cada elemento simplemente sigue unas reglas. Este tipo de comportamiento trata de imitar sistemas biológicos como el de los insectos sociales. Por ejemplo, queremos tener un grupo de robots, que recojan las pelotas de un campo de tenis una vez acabados los entrenamientos, y las lleven a una esquina del campo. Cada robot buscará una pelota, la detectará, recogerá, y trasladará al lugar adecuado. Para éste trabajo no es necesario que los robots se comuniquen entre ellos. Grupo de robots encargados de levantar columnas. http://birg.epfl.ch/page28710.html 5.-OTRAS VENTAJAS DEL USO DE ROBOTS COOPERATIVOS. Acciones mucho más rápidas: Si tuviésemos un solo robot, se tendría que encargar de realizar todas las tareas, reconocer el medio, enviar la información, tomar decisiones, controlar su movimiento. Al dividir las tareas entre varios equipos, el trabajo se realiza de una manera más rápida y eficiente. Tolerancia a fallos (redundancia). Un fallo en el funcionamiento de un robot, puede ser subsanado por el resto del equipo. Por ejemplo, un sistema en el que varios robots buscan una pelota en un recinto. Un robot puede pasar al lado de la pelota y no detectarla, pero un compañero suyo si la detecta y resuelve el error.
6.-INCONVENIENTES DEL USO DE ROBOTS COOPERATIVOS
Interferencias entre robots:
Según el tipo de programación y de control de los distintos robots que forman el
sistema, la interferencia entre ellos puede llegar a ser un problema, golpes, choques,
distracciones…Por ejemplo, tenemos un equipo de robot que queremos que sigan una
pelota, unos robots estorbarán el movimiento de los otros robots, o si los sensores no
son muy certeros, pueden confundir otro robot con la pelota.
Coste de la comunicación:
Los robots deben mantener una comunicación fluida ya sea entre ellos, o con una
unidad central, lo que complica su diseño, aumenta el peso y el consumo, y provoca
interferencia con otros sistemas de comunicación o con los sensores.
Incertidumbre respecto a los otros robots.
El sistema pierde eficacia cuando un robot realiza un trabajo que ya ha sido realizado
por un compañero suyo, o al contrario, dejar de realizar una tarea pensando que ya ha
sido realizada. Por ejemplo, un grupo de robots explorando un terreno, pueden pasar
varias veces por un mismo sitio, o dejar alguna zona sin explorar.
7.-COMPORTAMIENTO ANIMAL
En los últimos años, han surgido nuevas tecnologías, muchas de ellas tratando de imitar
comportamientos que ya han sido desarrollados con gran efectividad por la naturaleza.
El estudio de los insectos sociales, ejemplos naturales de sistemas de control
descentralizado, es un punto de partida importante para entender como controlar
sistemas complejos. Los insectos sociales son capaces de realizar tareas globales
basándose en reglas simples de interacción y percepción local.
Ejemplo práctico de robots cooperativos
En el siguiente link se explica el funcionamiento de
un sistema de robots cooperativo basado en el estudio
animal.
www.ifi.unizh.ch/groups/ailab/projects/flocking
Se intenta imitar el comportamiento de una bandada
de pájaros. (Cada “pájaro” es un robot como el de la
izquierda) En éste caso cada robot está programada
para que sigla cuatro reglas muy sencillas:
1. Evitar la colisión con los otros robots.
2. Correspondencia de velocidad: Cada robot
intentará mantener la misma velocidad que sus
compañeros más cercanos.
3. Agrupamiento: Cada robot intentará
acercarse a sus compañeros sin llegar a colisionar.
4. Velocidad de viaje: la “bandada” de robots,
deberá seguir un rumbo y una velocidad constante.8.-ROBÓTICA CELULAR Dentro de la robótica cooperativa, en los últimos años, esta surgiendo una nueva tecnología a partir de la robótica colectiva llamada robótica celular, esta consiste en un conjunto de múltiples robots que interactúan entre si como un todo formando un solo robot, capaz de cambiar de forma y de auto reconfigurarse, para lograr diferentes propósitos y formas. Cada robot tiene el nombre de célula, y cada una de estas células cuenta con una capacidad mínima de control y tiene la posibilidad de comunicarse con las células vecinas, logrando una inteligencia colectiva. Esta tecnología aun esta en proceso de desarrollo y solo se han construido prototipos experimentales, pero los grandes avances en materia de distribución de energía, protocolos de comunicación, mecanismos, micromáquinas y nanomáquinas están haciendo que esta tecnología tome cada día mas fuerza. 9.-ENLACES WEB DE INTERÉS http://www.ai.mit.edu/projects/ants/ Página del MIT (E.E.U.U.) en la que desarrollan un proyecto de robots cooperativos basándose en el comportamiento de las hormigas. Muy interesante! www.fira.net Página de la federación internacional de robot de fútbol. Organizan competiciones de fútbol de equipos de robot. www.webdearde.com Página de la asociación robótica de España. Actualmente en construcción, pero con documentación muy interesante, foros, imágenes… www-robotics.usc.edu Laboratorio de diseño y fabricación de robots. http://www.ece.ualberta.ca/~verret/msc_research.htm Explicación de varios proyectos de robots cooperativos.
También puede leer

















































