Hacia los sistemas robóticos autónomos y conectados - Robotics and Mechatronics Lab
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

Hacia los sistemas robóticos autónomos y conectados Alfonso J. García Cerezo J. Jesús Fernández Lozano Robotics and Mechatronics Lab Departamento de Ingeniería de Sistemas y Automática Universidad de Málaga ajgarcia@uma.es jesus.fernandez@uma.es @jesusfl

Contenido
• Antecedentes del grupo.
• Capacidades actuales del grupo.
• Trabajos en desarrollo.
2
Aplicaciones a intervenciones en
emergencia
https://www.uma.es/robotics-and-mechatronics/info/107721/FIRST-ROB/
3
Algunos antecedentes
AURIGA-α AURIGA-II
AURORA
ALACRANE
QUADRIGA
RAMBLER
https://www.uma.es/robotics-and-mechatronics/info/78403/archivo-de-documentos-rym/
4
Capacidades del grupo
En relación con la aplicabilidad a la Fuerza 2035:
• Conducción autónoma de vehículos.
• Automatización de convoyes logísticos.
• Sensores remotos sobre plataformas autónomas.
• Transporte de última milla.
• Exoesqueletos.
• Sistemas que aumenten la conciencia situacional.
5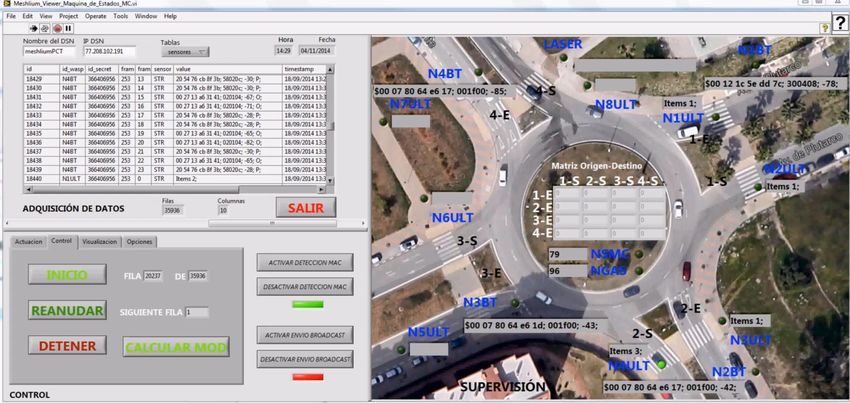
Capacidades del grupo
En relación con la aplicabilidad a la Fuerza 2035:
• Conducción autónoma de vehículos.
• Automatización de convoyes logísticos.
• Sensores remotos sobre plataformas autónomas.
• Transporte de última milla.
• Exoesqueletos.
• Sistemas que aumenten la conciencia situacional.
6
RAMBLER: Vehículo robótico todoterreno
❑ Direccionamiento skid steer con suspensión activa.
❑ Localización y Mapas 3D
❑ Modelado 3D de entornos no estructurados
❑ Navegación en terreno natural
Quadriga Alacrane
www.uma.es/robotics-and-mechatronics
RAMBLER: Vehículo robótico todoterreno
8
http://www2.isa.uma.es/C10/RAMBLER%20Towards%20Long-Range%20Exp/default.aspx
RAMBLER: Vehículo robótico todoterreno
9
https://www.uma.es/robotics-and-mechatronics/info/107721/FIRST-ROB/
Integración e interacción
10
https://www.uma.es/robotics-and-mechatronics/info/107721/FIRST-ROB/Interfaces Persona-Máquina
11
https://www.uma.es/robotics-and-mechatronics/info/107721/FIRST-ROB/Percepción
Los Multi-Beam Lidars (MBL) proporcionan información “3D”
rápidamente, pero la resolución vertical y el FOV están limitados.
Photo: 1 scan [Plaza et al., 2017, Sensors]
VLP-16 lidar by Velodyne 12
https://www.uma.es/robotics-and-mechatronicsPercepción
Un grado de libertad adicional mejora la resolución el FOV vertical.
Nuestro grupo cuenta con varios desarrollos en este campo, desde el
procesamiento a la construcción de sensors 3D a partir de sensores 2D.
8 scans / 45º tilt 420 scans / 45º tilt [Plaza et al., 2017, Sensors]
13
https://www.uma.es/robotics-and-mechatronicsCapacidades del grupo
En relación con la aplicabilidad a la Fuerza 2035:
• Conducción autónoma de vehículos.
• Automatización de convoyes logísticos.
• Sensores remotos sobre plataformas autónomas.
• Transporte de última milla.
• Exoesqueletos.
• Sistemas que aumenten la conciencia situacional.
14RAMBLER: convoyes https://www.uma.es/robotics-and-mechatronics 15
Capacidades del grupo
En relación con la aplicabilidad a la Fuerza 2035:
• Conducción autónoma de vehículos.
Trabajos en desarrollo
• Automatización de convoyes logísticos.
• Sensores remotos sobre plataformas autónomas.
• Transporte de última milla.
• Exoesqueletos.
• Sistemas que aumenten la conciencia situacional.
16Trabajos en desarrollo: 2019-2021
• Planificación inteligente de caminos:
• Planificación basada en aprendizaje.
• Formaciones no lineales, dispersión y reagrupamiento.
• Navegación con denegación de GNSS.
• Operación resiliente de sistemas robóticos:
• Tolerancia a fallos en sistemas robóticos.
• Resiliencia de equipos multirrobot (centro de control, elementos imprevistos).
• Robotización de plataformas convencionales (control y sensorización):
• Nissan Leaf (vehículo eléctrico de carretera).
• ARGO XTI (8x8 anfibio en servicio en las FAS).
17Capacidades del grupo
En relación con la aplicabilidad a la Fuerza 2035:
• Conducción autónoma de vehículos.
• Automatización de convoyes logísticos.
• Sensores remotos sobre plataformas autónomas.
• Transporte de última milla.
• Exoesqueletos.
• Sistemas que aumenten la conciencia situacional.
18Urban Information System
4
Obtención de información relevante
para la gestión del tráfico mediante
redes de sensores inalámbricos:
• Número de vehículos. 3
1
• Repartos
• Matriz origen-destino.
• Parámetros ambientales
2
Proyecto GI3000/IDIZ de la Agencia de Obra Pública, Consejería de
Obras Públicas y Vivienda, de la Junta de Andalucía con la
cofinanciación de fondos FEDER.
https://www.uma.es/robotics-and-mechatronics 19Urban Information System
Interfaz en tiempo real con datos de nodos inalámbricos
Proyecto GI3000/IDIZ de la Agencia de Obra Pública, Consejería de Obras Públicas y
Vivienda, de la Junta de Andalucía con la cofinanciación de fondos FEDER.
https://www.uma.es/robotics-and-mechatronics 20Urban Information System: una WSN estática
2D Laser Node
Laptop
Presence Detection Node
Receiver Node
Gas Node
Environmental Node
External Database
Transmitter Nodes
21Nodos móviles
Gas Node
Environmental Node Receiver Node External Database
Transmitter Nodes
• Subconjunto de nodos sensores disponibles.
• Nodo coordinador.
• Puede actuar como una subred, pero la red estática la ve como un
nodo sensor.
22Nodos móviles
Nodos disponibles:
• UIS Bluetooth node
• UIS Ultrasound node.
• UIS Laser node.
• UIS Environmental Pollution node
(polvo, intensidad luminosa y ruido).
• UIS Gas node
(O2, O3, CO2, CO, NH3, VOC, humedad, presión
atmosférica y temperatura).
23WSN híbrida con nodo móvil
Transmitter
Node
Environmental Node
Transmitter Gas Node
Node Receiver
Node
Receiver Node
Agent #1
Transmitter
Node
Mobile Node
Agent #n
Control
Centre
External Database
24Integración de un vehículo eléctrico como
nodo móvil
Configuración de un vehículo eléctrico
como nodo móvil de la red inalámbrica
para obtener datos ambientales en un
área de dimensión urbana.
Socarrás Bertiz, C.A.; Fernández Lozano, J.J.; Gomez-
Ruiz, J.A.; García-Cerezo, A. Integration of a Mobile
Node into a Hybrid Wireless Sensor Network for Urban
Environments. Sensors 2019, 19, 215.
25WSN híbrida con nodo móvil: aplicaciones de rescate
Transmitter
Node
Transmitter
Nodes
Transmitter
Node Receiver
Node
Mobile
Agent #1 Sink
Transmitter
Node
Agent #n
Control
Centre
External Database 26WSN híbrida con nodo móvil: aplicaciones de rescate
Rescue
dog
External Database
Transmitter
Node
Mobile Sink
Receiver
Node
Control
Transmitter
Centre Node
27Integración de perros de rescate con WSN: maniobras Fernández-Lozano, J.J., Mandow, A., Martín-Guzmán, M., Martín-Ávila, J., Serón, J. Martínez, J.L., Gomez-Ruiz, J.A., Socarras-Bertiz, C., Miranda-Páez, J., García-Cerezo, A. Integration of a Canine Agent in a Wireless Sensor Network for Information Gathering in Search and Rescue Missions (2018) IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain. 28
Capacidades del grupo
En relación con la aplicabilidad a la Fuerza 2035:
• Conducción autónoma de vehículos.
• Automatización de convoyes logísticos.
• Sensores remotos sobre plataformas autónomas. Trabajos en desarrollo
• Transporte de última milla.
• Exoesqueletos.
• Sistemas que aumenten la conciencia situacional.
29Trabajos en desarrollo 2019-2020
• Implantación basada en LoRa
• Evaluación en entorno urbano
• Evaluación en aplicaciones para emergencias
• Implantación basada en 5G
• Colaboración con operadora internacional.
• Alcance aún reservado.
30Zona de rescate a partir de datos de UAV https://www.uma.es/robotics-and-mechatronics 31
www.uma.es/robotics-and-mechatronics Alfonso J. García Cerezo - ajgarcia@uma.es https://www.uma.es/robotics-and-mechatronics J. Jesús Fernández Lozano - jesus.fernandez@uma.es Robotics and Mechatronics Lab Departamento de Ingeniería de Sistemas y Automática Universidad de Málaga 32
También puede leer