TRABAJO DE FIN DE GRADO - UPCommons
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

TRABAJO DE FIN DE GRADO TÍTULO DEL TFG: Estudio de un dron propulsado por pila de combustible de hidrógeno para transportar órganos de trasplante a largas distancias TITULACIÓN: Grado en Ingeniería de Aeronavegación AUTOR: Adrià Simó Melgar DIRECTOR: Xavier Salueña Berna FECHA: 8 de julio de 2021
AGRADECIMIENTOS En primer lugar, quería agradecer a mi tutor, Xavier Salueña Berna, por confiar en mí y brindarme la oportunidad de abordar este proyecto, inicialmente planteado como un Trabajo de Fin de Máster. Agradezco su predisposición desde el primer momento y la flexibilidad con la que me permitió desarrollar el proyecto enfocado a mi visión personal. Ha sido un placer, espero pronto coincidir en el transcurso del máster que pretendo cursar en mi próximo año académico. Quería darle las gracias de todo corazón a mis padres, Ricard y Àngels, por apoyarme siempre en los momentos más difíciles de la carrera y confiar en mí desde que la empecé. También por haber financiado mis estudios y velar por mi bienestar y mi futuro. Finalmente quería agradecer a Paula Beneyto, mi pareja, por ayudarme en la revisión del proyecto y por ser mi apoyo incondicional.
Título: Estudio de un dron propulsado por pila de combustible de hidrógeno para transportar órganos de trasplante a largas distancias Autor: Adrià Simó Melgar Director: Xavier Salueña Berna Fecha: 8 de julio de 2021 Resumen Este informe presenta el estudio y desarrollo de una aeronave no tripulada (dron) que tiene la finalidad de transportar órganos de trasplante a largas distancias. La aeronave es propulsada con una pila de combustible de hidrógeno como alternativa sostenible a las baterías de litio convencionales usadas en la mayoría de drones. La mayor virtud del uso de pilas en drones es sin duda la gran autonomía que ofrecen. El estudio empieza con un análisis de las distintas clases de drones existentes y con un razonamiento detallado del porqué de la configuración elegida, que consiste en un multirrotor octocóptero con motores coaxiales. En este proceso también se ha realizado un estudio de mercado y estado del arte. A continuación, se ha llevado a cabo una selección de los componentes, poniendo especial énfasis en todo el sistema de propulsión del dron; esto es, la pila de combustible de hidrógeno, los motores, las hélices y los controladores de velocidad. En cuanto a la metodología seguida para determinar el peso del vehículo, esta ha sido adaptada al proyecto partiendo de un estudio de la carga de pago y del estudio de mercado mencionado. Por carga de pago nos referimos al órgano en sí y a un contenedor isotérmico diseñado para depositar órganos de trasplante. En lo que respecta al diseño, se han resumido los conceptos fundamentales considerados, como es la investigación de los materiales o la decisión de las dimensiones fijadas. Asimismo, se ha realizado un planteamiento de lo que podría ser una estación de repostaje del hidrógeno que necesita la pila para funcionar, con un mecanismo que permitiría el anclaje al dron sin requerir de acción humana. Para ello, también se ha diseñado un regulador de hidrógeno adaptado a la estación de repostaje, de modo que el dron pueda realizar todo el proceso del repostaje del hidrógeno de forma automatizada.

Title: Study of a hydrogen fuel cell-powered drone to carry transplant organs over long distances Author: Adrià Simó Melgar Director: Xavier Salueña Berna Date: July 8th 2021 Overview This report presents the study and development of an Unmanned Aerial Vehicle (UAV) that aims to transport organs for transplantation over long distances. The aircraft is powered by a hydrogen fuel cell as a sustainable alternative to the conventional lithium batteries used in most drones. The greatest virtue of the use of fuel cells in drones is undoubtedly the good autonomy they offer thanks to a high specific energy (Wh / kg). The study begins with the analysis of the different classes of existing drones and a detailed reasoning about the configuration chosen, which consists of a coaxial octocopter. Within this process, a market and state-of-the-art study have been carried out as well. A selection of the components has also been made, with special emphasis on the entire propulsion system of the drone; that is, the hydrogen fuel cell, the motors, the propellers and the speed controllers or ESC. With regard to the methodology followed to determine the weight of the vehicle, it has been adapted to the project based on a study of the payload and the aforementioned market study. What we mean by payload is the organ itself and an isothermal container specially designed for transplant organs. Regarding the design, the fundamental concepts considered have been summarized, such as the investigation of the materials or the decision of the dimensions taken. Likewise, an initial design of what could be a hydrogen refuelling station has also been made, consisting of a mechanism that would allow anchoring to the drone without requiring human action. In order to perform this, a hydrogen regulator has also been designed and adapted to the station, so that the drone can carry out the entire hydrogen refuelling process in an automated way.
ÍNDICE INTRODUCCIÓN ............................................................................................... 1 CAPÍTULO 1. MARCO TEÓRICO ..................................................................... 3 1.1 Drones ................................................................................................................................ 3 1.1.1 Definición de dron y aplicaciones ........................................................................... 3 1.1.2 Clasificación según la estructura ............................................................................ 4 1.2 Pilas de combustible ......................................................................................................... 7 1.2.1 Definición de pila de combustible ........................................................................... 7 1.2.2 Comparativa entre sistemas de propulsión .......................................................... 10 1.2.3 Sistema de propulsión híbrido .............................................................................. 11 CAPÍTULO 2. ESTADO DEL ARTE ................................................................ 12 2.1 Proyectos similares ......................................................................................................... 12 2.1.1 DS30 - Doosan Mobility Innovation ...................................................................... 12 2.1.2 Proyecto de la Universidad de Maryland .............................................................. 13 2.1.3 Wingcopter............................................................................................................ 13 2.1.4 Zipline ................................................................................................................... 14 2.1.5 BSHARK Narwhal 2 .............................................................................................. 14 2.1.6 Hycopter ............................................................................................................... 15 2.2 Pilas de hidrógeno en el mercado ................................................................................. 15 2.3 Depósito para almacenar el hidrógeno ......................................................................... 16 2.4 Tecnología en los motores ............................................................................................. 17 CAPÍTULO 3. ELECCIÓN DEL TIPO DE DRON Y SELECCIÓN DE LOS COMPONENTES ............................................................................................. 18 3.1 Configuración del dron ................................................................................................... 18 3.1.1 Elección del tipo de dron ...................................................................................... 19 3.1.2 Ánalisis de multirrotores para el transporte de órganos ....................................... 20 3.2 Componentes del dron ................................................................................................... 28 3.2.1 Metodología seguida ............................................................................................ 29 3.2.2 Componentes ....................................................................................................... 32 3.2.3 Decisión final ........................................................................................................ 34 3.3 Peso total .......................................................................................................................... 36 3.4 Autonomía ........................................................................................................................ 37 3.5 Esbozo de componentes ................................................................................................ 38 CAPÍTULO 4. DISEÑO DEL DRON Y ANÁLISIS ESTRUCTURAL ................ 39 4.1 Materiales ......................................................................................................................... 39 4.1.1 Compuesto de fibra de carbono y resina epoxi .................................................... 40

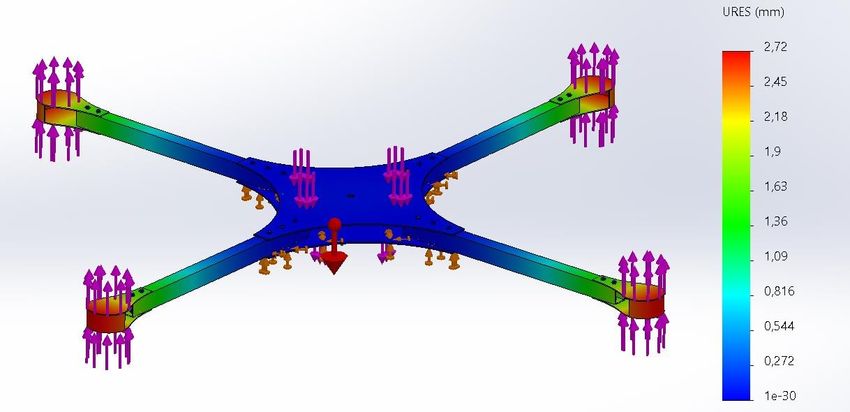
4.2 Diseño del regulador de hidrógeno ............................................................................... 42 4.2.1 Conector de entrada del regulador ....................................................................... 42 4.2.2 Conector de salida del regulador.......................................................................... 42 4.3 Diseño en SolidWorks ..................................................................................................... 43 4.4 Simulación ........................................................................................................................ 48 CAPÍTULO 5. SOLUCIÓN PARA EL REPOSTAJE DEL HIDRÓGENO ......... 53 5.1.1 Base de la estación .............................................................................................. 53 5.1.2 Surtidor de hidrógeno ........................................................................................... 53 CAPÍTULO 6. PRESUPUESTO Y VIABILIDAD LEGISLATIVA...................... 56 6.1 Coste del material ............................................................................................................ 56 6.2 Coste humano .................................................................................................................. 57 6.3 Normativa y regulación ................................................................................................... 57 CONCLUSIONES ............................................................................................ 58 BIBLIOGRAFÍA ............................................................................................... 60 ANEXO ............................................................................................................ 64
ÍNDICE DE FIGURAS Fig. 1.1 Dron con cámara térmica [3]. ................................................................ 4 Fig. 1.2 Dron de ala fija [4]. ................................................................................ 5 Fig. 1.3 Helicóptero Prodrone PDH-03 [5]. ........................................................ 5 Fig. 1.4 Dron autogiro [6]. .................................................................................. 6 Fig. 1.5 Cuadricóptero DJI Mavic 2 [7]. .............................................................. 6 Fig. 1.6 Dron híbrido VTOL de ala fija [8]. .......................................................... 7 Fig. 1.7 Tipos de pilas y características principales [9]. ..................................... 8 Fig. 1.8 Representación gráfica de una celda de una pila PEM [10]. ................. 9 Fig. 1.9 Comparativa entre pilas de combustible y otros métodos de propulsión [11]. .................................................................................................................. 11 Fig. 2.1 Doosan DS30 con suministros médicos [13]. ...................................... 13 Fig. 2.2 Dron de la Universidad de Maryland [15]. ........................................... 13 Fig. 2.3 Dron híbrido Wingcopter [16]. ............................................................. 14 Fig. 2.4 Dron Zipline dejando caer suministros médicos [17]. .......................... 14 Fig. 2.5 BSHARK Narwhal 2 [18]. .................................................................... 15 Fig. 2.6 Hexacóptero Hycopter [19]. ................................................................ 15 Fig. 3.1 Trasplantes realizados en todo el mundo durante el 2019 [21]. .......... 23 Fig. 3.2 Contenedor isotérmico reutilizable Diagnosach [22]. .......................... 23 Fig. 3.3 Regresión lineal para estimar el peso del dron (Fuente: Elaboración propia con MATLAB) ........................................................................................ 25 Fig. 3.4 Configuraciones de un octocóptero..................................................... 25 Fig. 3.5 Octocóptero en configuración coaxial (izquierda) y planar (derecha) (Fuente: Elaboración propia). ........................................................................... 26 Fig. 3.6 Regresión lineal para estimar la distancia diagonal entre ejes a partir de la MTOM (Fuente: Elaboración propia con MATLAB) ...................................... 27 Fig. 3.7 Diagrama de bloques de la metodología seguida (Fuente: Elaboración propia). ............................................................................................................. 30 Fig. 3.8 Características T-Motor U10II 100 KV [29] ......................................... 31 Fig. 3.9 Tanque de hidrógeno CTS de 9L [31]. ................................................ 33 Fig. 3.10 Motor U8II KV100 [33]....................................................................... 35 Fig. 3.11 Controlador de velocidad ALPHA 60A HV [34]. ................................ 36 Fig. 3.12 Pila de hidrógeno Intelligent Energy 2,4 kW [35]. ............................. 36 Fig. 3.13 Diagrama de los componentes del dron (Fuente: Elaboración propia). ......................................................................................................................... 38 Fig. 4.1 Representación de un material compuesto [39]. ................................. 40
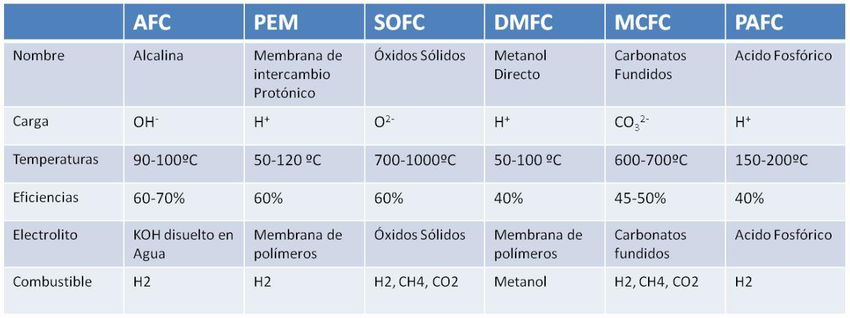
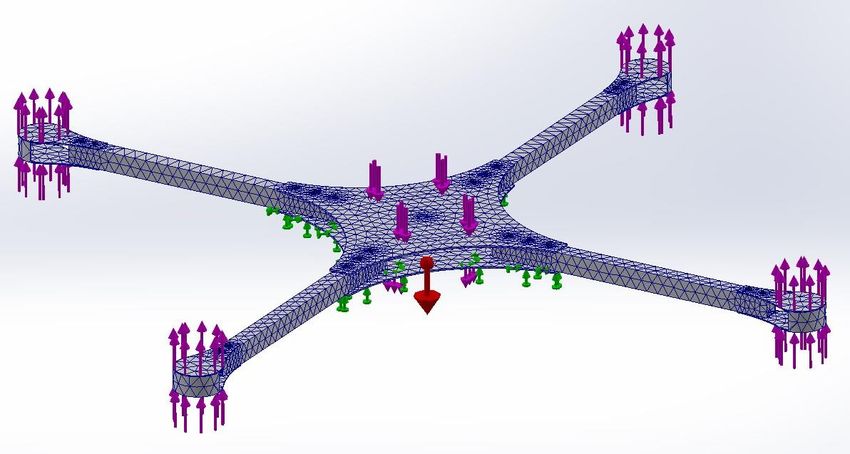
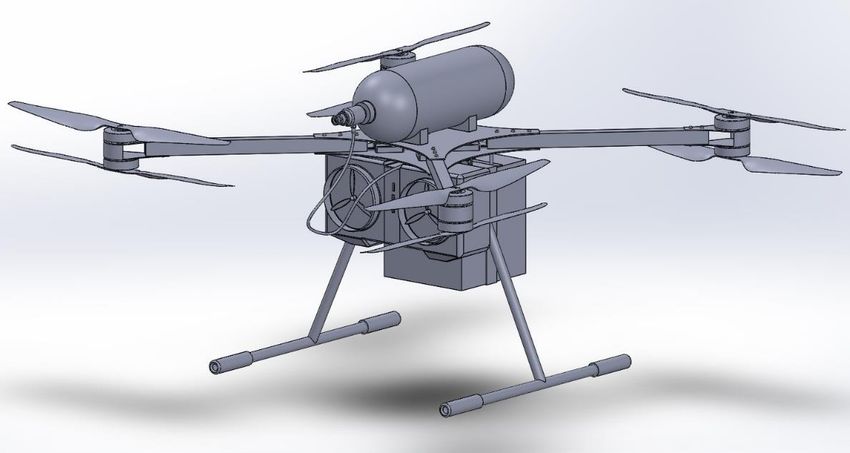
Fig. 4.2 Principales tejidos de fibra de carbono. De izquierda a derecha: unidireccional, tafetán, sarga y raso. ................................................................ 40 Fig. 4.3 Propiedades compuesto SolidWorks. ................................................. 41 Fig. 4.4 Regulador de hidrógeno realizado con SolidWorks® (Fuente: Elaboración propia). ......................................................................................... 43 Fig. 4.5 Croquis del depósito de hidrógeno con el regulador (unidades en mm). (Fuente: Elaboración propia). ........................................................................... 44 Fig. 4.6 Croquis del dron (unidades en mm) (Fuente: Elaboración propia). ..... 45 Fig. 4.7 Vista isométrica del dron (Fuente: Elaboración propia)....................... 46 Fig. 4.8 Vista frontal del dron (Fuente: Elaboración propia). ............................ 46 Fig. 4.9 Vista lateral del dron (Fuente: Elaboración propia). ............................ 47 Fig. 4.10 Vista superior del dron (Fuente: Elaboración propia). ....................... 47 Fig. 4.11 Centro de masas del dron (Fuente: Elaboración propia)................... 48 Fig. 4.12 Tornillos, arandelas y tuercas para sujetar los brazos (Fuente: Elaboración propia) .......................................................................................... 49 Fig. 4.13 Estructura simulada con las fuerzas y el mallado definidos (Fuente: Elaboración propia). ......................................................................................... 50 Fig. 4.14 Tensión de von Mises (unidades en / 2) (Fuente: Elaboración propia). ............................................................................................................. 51 Fig. 4.15 Desplazamiento (unidades en mm) (Fuente: Elaboración propia). ... 51 Fig. 4.16 Tensión de von Mises con los brazos fijados (Fuente: Elaboración propia). ............................................................................................................. 52 Fig. 5.1 Base de la estación de repostaje (Fuente: Elaboración propia). ......... 53 Fig. 5.2 Barra que empuja el dron (Fuente: Elaboración propia). .................... 54 Fig. 5.3 Dron en la estación de repostaje (Fuente: Elaboración propia). ......... 55 Fig. 9.1 Diagrama de Gantt (Fuente: Elaboración propia) ............................... 64 Fig. 9.2 Especificaciones T-MOTOR U8II KV100 [33]. .................................... 66 Fig. 9.3 Empuje, eficiencia y potencia en función de RPM [33]. ...................... 66 Fig. 9.4 Dimensiones del receptáculo H35 [41]................................................ 67 Fig. 9.5 Medidas del conector de salida del regulador [43]. ............................. 68

ÍNDICE DE TABLAS Tabla 2.1 Pilas de hidrógeno del mercado (Fuente: Elaboración propia). ....... 16 Tabla 2.2 Tanques de hidrógeno tipo IV para UAVs disponibles en el mercado (Fuente: Elaboración propia) ............................................................................ 17 Tabla 3.1 Evaluación de aspectos positivos y negativos de cada tipo de dron (Fuente: Elaboración propia) ............................................................................ 18 Tabla 3.2 Características de los principales órganos trasplantables (Fuente: Elaboración propia). ......................................................................................... 22 Tabla 3.3 Estimación del peso de la carga transportada (Fuente: Elaboración propia) .............................................................................................................. 24 Tabla 3.4 Motores posibles para una MTOM de 24,9 kg (Fuente: Elaboración propia). ............................................................................................................. 32 Tabla 3.5 Peso estimado (Fuente: Elaboración propia). .................................. 34 Tabla 3.6 Especificaciones del motor elegido (Fuente: Elaboración propia). ... 35 Tabla 3.7 Peso de los componentes (Fuente: Elaboración propia).................. 36 Tabla 4.1 Materiales más empleados en drones [38]. ..................................... 39 Tabla 4.2 Propiedades isotrópicas del material (Fuente: Elaboración propia). 49 Tabla 6.1 Coste del material del UAV (Fuente: Elaboración propia) ................ 56 Tabla 6.2 Coste de elaboración del proyecto (Fuente: elaboración propia). .... 57 Tabla 9.1 Especificaciones de drones del mercado ......................................... 65
LISTA DE ACRÓNIMOS • UNOS: United Network of Organ Sharing • UAV: Unmanned Aerial Vehicle (vehículo aéreo no tripulado) • RPAS: Remotely Piloted Aircraft System (dron pilotado de forma remota) • VTOL: Vertical Take-Off and Landing (despegue y aterrizaje vertical) • PEMFC: Proton-Exchange Membrane Fuel Cell (pila de combustible de membrana protónica) • − : Electrón • + : Protón o catión de hidrógeno • H2 : Molécula de hidrógeno • 2: Molécula de oxígeno • FCPM: Fuel Cell Power Module (módulo de la pila de combustible) • COPV: Composite Overwrapped Pressure Vessels • EMI: Electromagnetic Intereference (interferencia electromagnética) • ESC: Electronic Speed Controller (controlador electrónico de velocidad) • CW: Clockwise (en el sentido de las agujas del reloj) • CCW: Counterclockwise (en el sentido contrario a las agujas del reloj) • KV: Constante de velocidad en los motores sin escobillas • OMS: Organización Mundial de la Salud • MTOM: Maximum Take-Off Mass (masa máxima al despegue) • PDB: Power Distribution Board (placa de distribución de potencia) • CFRP: Carbon Fiber Reinforced Polymer • : Distancia axial (entre hélices en un sistema coaxial) • : Diámetro de la hélice • dcoaxial : Diámetro de la hélice en un sistema coaxial • dplanar : Diámetro de la hélice en un sistema planar • : Distancia diagonal entre ejes • Emot @100% : Empuje del motor al 100% del acelerador • Emot @40−50%: Empuje del motor al 40-50% del acelerador. Estimado como el empuje para un vuelo estacionario
• rCM : Centro de masas • rcil : Centroide del cilindro de hidrógeno • rreg : Centroide del regulador de presión • mcil : Masa del cilindro de hidrógeno • mreg : Masa del regulador de presión • BVLOS: Beyond Visual Line of Sight (se usa para describir que el dron se encuentra fuera del alcance visual)
Introducción 1 INTRODUCCIÓN España ha sido considerado el país con mayor tasa de donación de órganos de todo el mundo durante 28 años consecutivos. Las donaciones se realizan siempre de forma altruista y todo el proceso es cubierto por el Sistema Nacional de Salud. En 2019, España aportó el 20% de donaciones de la UE y el 6% a nivel mundial, a pesar de que representa aproximadamente el 9,1% de la población europea y el 0,6% de la mundial [1]. En cuanto a trasplantación de órganos, se alcanzó una tasa de 117,4 trasplantes por millón de población, sólo superada por Estados Unidos. Sin embargo, España lidera el ranking de trasplantes por parte de donantes fallecidos en el mundo. El tiempo es un factor crucial en lo que respecta a la preservación de órganos trasplantables. En la gran mayoría de los casos, cuando se lleva a cabo la extracción del órgano, el donante se encuentra en un punto geográfico muy distinto al del receptor, por lo que es muy importante seleccionar meticulosamente el medio de transporte adecuado, ya sea terrestre (ambulancias, coches de alquiler o trenes) o aéreo (helicópteros, aviones privados o comerciales). De acuerdo con la United Network for Organ Sharing (UNOS), que administra el sistema de trasplante de órganos en Estados Unidos, en 2018 aproximadamente el 1,5% de los envíos de órganos de donantes fallecidos no llegaron al destino previsto, y casi el 4% de los envíos de órganos tuvieron un retraso imprevisto de dos o más horas [2]. Así pues, debido a que los órganos tienen un tiempo de preservación muy limitado, es de suma importancia el hecho de que lleguen en el menor tiempo y mejor estado posibles. La solución que se presenta en este documento para agilizar este proceso y que los pacientes puedan recibir el órgano al tiempo previsto consiste en el transporte del órgano mediante una aeronave no tripulada o dron. Los drones tienen un futuro muy prometedor, ya que cada vez son más capaces de realizar actividades complejas que hace unos años eran impensables. A diferencia de los medios de transporte habituales, el transporte del órgano mediante dron no dependería de factores ajenos e impredecibles, como puede ser el retraso de un vuelo de avión o el tráfico en carreteras o ciudades. Así pues, este proyecto consiste en el estudio y desarrollo de un dron propulsado por una pila de combustible de hidrógeno con la finalidad de transportar órganos trasplantables a largas distancias. El dron tiene que ser capaz de despegar y aterrizar en hospitales o zonas cercanas para que el trasplante pueda realizarse con la mayor eficiencia posible. Los mismos cirujanos o médicos tendrían que poder sacar el órgano sin necesidad de un técnico especializado en drones. Este órgano estaría depositado en un contenedor apropiado, y el total de su peso más el del contenedor formarían la carga útil, que no debe de exceder los 10 kg. Puesto que el diseño de un dron de este calibre puede ser un proyecto muy minucioso, el objetivo de este trabajo consiste en el diseño del dron, así como la estructura, disposición, y cálculo de motores y hélices. Se hará especial énfasis al sistema de propulsión del vehículo, formado principalmente por la pila de
2 Estudio de un dron propulsado por pila de hidrógeno para transportar órganos de trasplante combustible de hidrógeno. Como veremos más adelante, la justificación principal del uso de una pila de hidrógeno es la gran autonomía que ofrece y la facilidad de repostaje del combustible. También se pretende realizar el planteamiento de un mecanismo para poder rellenar el tanque que almacena el hidrógeno de forma automatizada. La idea es que el dron pueda volar largas distancias y que tenga la capacidad de realizar paradas a mitad de trayecto para llenar el depósito del hidrógeno de manera autónoma. En última instancia, se realizará un cálculo estimado del presupuesto de los materiales y del coste humano que hubiera sido necesario para el desarrollo de este proyecto, así como un breve estudio de la viabilidad del proyecto en términos de regulaciones y normativa.
Marco teórico 3 1 CAPÍTULO 1. MARCO TEÓRICO Este primer capítulo se ha redactado con objeto de introducir los fundamentos teóricos necesarios para poder contextualizar la metodología seguida en el proyecto. Se centra en los dos pilares principales sobre los que se sustenta el estudio; es decir, los drones y las pilas de combustible de hidrógeno. 1.1 Drones Para poder ubicar al lector al estudio desarrollado en este documento, es importante tener conocimiento de unos conceptos básicos acerca de los drones. Aquí se encontrará con una breve introducción a los drones y a los usos que se les da, así como las distintas clases de drones que existen en la actualidad. 1.1.1 Definición de dron y aplicaciones Brevemente definido, un dron es un vehículo aéreo que vuela sin ser tripulado. Estos también se suelen llamar UAVs (del inglés Unmanned Aerial Vehicle), y es por ello que se usarán ambos términos indistintamente a lo largo del documento. Este acrónimo muy a menudo se confunde con RPAS (del inglés Remotely Piloted Aircraft System), aunque realmente un RPAS es un tipo de UAV en particular, cuyo pilotaje es controlado remotamente. En caso de que no fuera pilotado por alguien, hablaríamos de un UAV autónomo. Aunque se tiene conocimiento del uso de drones desde 1849, las primeras aplicaciones más destacadas hacen referencia a principios del siglo XX, a raíz de la Primera Guerra Mundial. En aquel entonces, estos vehículos eran empleados para misiones de combate o vigilancia. Sin embargo, el uso de drones a día de hoy va más allá del contexto militar y abarca un rango muy amplio de actividades. La mayoría de usos son recreativos, aunque cada vez se usan más para fines científicos, fotográficos, industriales o incluso para prevenir y controlar incendios forestales, entre otras aplicaciones más. El hecho de que puedan ser pilotados de forma muy sencilla y que tengan un formato muy compacto, hace que sean unos artefactos muy adecuados para infinidad de situaciones, ya que permiten tener alcance a lugares de muy difícil acceso para las personas. Esto es posible gracias a la incorporación a bordo de GPS, cámaras y todo tipo de sensores específicos para cada uso en particular.
4 Estudio de un dron propulsado por pila de hidrógeno para transportar órganos de trasplante Fig. 1.1 Dron con cámara térmica [3]. Uno de los servicios más prometedor en el mundo de los drones es el servicio de paquetería y transporte. Cada vez hay más empresas dedicadas exclusivamente a ofrecer este servicio e incluso muchas empresas reconocidas están desarrollando proyectos con drones, como puede ser el caso de Amazon, Uber o UPS. Las numerosas ventajas que ofrecen estos vehículos para la entrega de paquetes hacen que se contemple y estudie cada vez más su viabilidad, en zonas rurales y urbanas. El uso de drones como servicio de mensajería supondría una reducción en los costes de transporte, una mejoría en la logística de la empresa, y una disminución del tiempo de entrega. Asimismo, no habría ningún tipo de retrasos debido a congestiones de tráfico en las carreteras. 1.1.2 Clasificación según la estructura Una vez conocido el uso que se le va a dar a un dron, el siguiente paso es determinar qué tipo es el más apropiado para dicho uso. A continuación, se han descrito brevemente los principales tipos de drones que existen en función de su tipo de vuelo. Ala fija Este primer tipo se caracteriza por tener alas y volar gracias a la fuerza de sustentación que estas generan. De esta manera, y al igual que en los aviones, el motor de este dron se usa únicamente para producir empuje. El mayor inconveniente de este tipo de UAVs es que requieren de una pista de despegue y aterrizaje o de algún sistema de catapulta.
Marco teórico 5 Fig. 1.2 Dron de ala fija [4]. Helicóptero El sistema de propulsión de los helicópteros está formado por un solo rotor principal que genera sustentación y hace posible el desplazamiento horizontal y vertical. Esto supone una alta complejidad estructural, ya que este único rotor se encarga de que las palas adopten un ángulo de ataque distinto según la dirección a la que se desplace el helicóptero. A menudo suele haber una hélice secundaria en la cola que tiene la función de compensar el momento generado por la rotación del rotor principal. Fig. 1.3 Helicóptero Prodrone PDH-03 [5]. Autogiro Un autogiro es una aeronave de ala rotatoria cuya fuerza de sustentación es generada por una pala superior que gira libremente sin la acción de un motor. Al igual que en los drones de ala fija, el motor únicamente genera fuerza de avance y es la propia fricción del aire la que hace girar la pala superior y producir sustentación. Pese a ser más eficientes que los helicópteros, los autogiros requieren de una pista de despegue y aterrizaje.
6 Estudio de un dron propulsado por pila de hidrógeno para transportar órganos de trasplante Fig. 1.4 Dron autogiro [6]. Multirrotor o multicóptero Sin duda, esta clase de drones es las más popular y comercializada. Cuentan con más de dos motores que se usan tanto para despegar y aterrizar verticalmente como para desplazarse de forma horizontal. A diferencia de los helicópteros, los multirrotores se desplazan variando la velocidad relativa de cada motor y no requieren de ningún sistema complejo en los rotores. La estabilidad y maniobrabilidad varían según el número de motores, su distribución, el número de brazos y la forma de las hélices. Cuantos más brazos tenga el dron, más estable será y cuantos más motores, mayor será la fuerza de propulsión generada y consecuentemente su consumo. Dependiendo del número de rotores que tengan, los multirrotores pueden ser tricópteros, cuadricópteros, hexacópteros, octacópteros, etc. Fig. 1.5 Cuadricóptero DJI Mavic 2 [7]. Híbrido VTOL de ala fija Finalmente existen los drones híbridos VTOL (del inglés Vertical Take-Off and Landing) de ala fija, que pueden despegar y aterrizar verticalmente como un multirrotor y volar en crucero como un dron de ala fija. Adoptan las principales ventajas de ambos tipos en un solo vehículo, ofreciendo así una gran versatilidad. Para poder hacer el cambio de tipo de vuelo, la mayoría de drones híbridos dotan de alas o motores orientables.
Marco teórico 7 Fig. 1.6 Dron híbrido VTOL de ala fija [8]. 1.2 Pilas de combustible Actualmente, la gran mayoría de drones pequeños y medianos usan baterías de litio por las excelentes características y propiedades que presentan, ya que tienen la capacidad de almacenar una gran cantidad de energía en un formato ligero y compacto. A pesar de ello, no son perfectas, y uno de sus puntos más débiles en aplicaciones de drones es la autonomía tan limitada que ofrecen. Una alternativa para solventar este problema es el uso de pilas de combustible. 1.2.1 Definición de pila de combustible Una pila de combustible es un dispositivo que genera electricidad a partir de una serie de reacciones electroquímicas entre un combustible y oxidante. La transformación de la energía química en energía eléctrica es directa, y la corriente es generada siempre y cuando se mantenga el suministro de ambos reactantes. El término pila proviene del inglés stack, que significa montón o apilamiento. Y es que, al igual que en las baterías de litio, cada pila de combustible está compuesta por múltiples celdas que producen un voltaje de entre 0,6 V a 0,8 V cada una. Así pues, conectando o apilando muchas de estas celdas en serie, se pueden conseguir voltajes más elevados y de interés para muchas aplicaciones. Mientras que el voltaje de la pila depende del número de celdas que la forman, la corriente producida viene determinada por el área superficial de cada celda, incrementando esta cuanta mayor sea la superficie. Cada celda está constituida por dos electrodos y un electrolito que los separa. El combustible se hace circular por el electrodo negativo (ánodo), mientras que un oxidante, generalmente oxígeno o aire, se introduce de forma contínua en el electrodo positivo (cátodo). Las pilas se pueden clasificar en función de muchos parámetros, pero comúnmente se distinguen según el tipo de electrolito que las conforman:
8 Estudio de un dron propulsado por pila de hidrógeno para transportar órganos de trasplante • Pila de combustible de membrana de intercambio protónico o membrana polimérica (PEMFC) • Pila de combustible de metanol (DMFC) • Pila de combustible alcalina (AFC) • Pila de combustible de ácido fosfórico (PAFC) • Pila de combustible de carbonato fundido (MCFC) • Pila de combustible de óxido sólido (SOFC) Atendiendo al uso específico en drones, es de suma importancia tener en cuenta el peso, tamaño y temperatura a la cual operan. Es por ello que no se describirán las pilas MCFC, PAFC y SOFC, ya que funcionan a temperaturas demasiado elevadas. Las tres pilas restantes operan a temperaturas más bajas, aunque tienen propósitos muy distintos. Las pilas alcalinas fueron las primeras que se utilizaron, con el fin de producir energía eléctrica y aire a bordo de naves espaciales. Estas pilas son de alto rendimiento y muy eficientes, pero son muy sensibles a la contaminación por dióxido de carbono, por lo que se necesitaría purificar tanto el hidrógeno (combustible) como el oxígeno (oxidante), aumentando su coste, peso y tamaño. En cuanto a las pilas de combustible de metanol (DMFC), encontramos una menor eficiencia, además del uso de un combustible tóxico. Podemos ver un resumen de las características principales de cada pila en la Fig. 1.7. Son por estos motivos que en la mayoría de casos, las PEMFC (del inglés Proton Exchange Membrane Fuel Cell o Polymer Electrolyte Membrane Fuel Cell) son las pilas más recomendables para el uso en drones. Son las pilas más avanzadas y accesibles en el mercado, ya que operan a una temperatura razonable y tienen una alta densidad de potencia. Asimismo, usan el hidrógeno como combustible, por lo que son sostenibles con el medio ambiente siempre y cuando este gas provenga de fuentes limpias. Tiene una eficiencia eléctrica entre el 40% y el 60%. Fig. 1.7 Tipos de pilas y características principales [9].
Marco teórico 9 Funcionamiento de las pilas PEM En las celdas de las pilas de combustible de membrana polimérica, el hidrógeno fluye hacia el ánodo, donde un catalizador, normalmente de platino, facilita la disociación de electrones ( − ) y protones ( + ). Los protones atraviesan la membrana de polímeros (flechas verdes en Fig. 1.8) para formar una nueva reacción catalizada en el cátodo, con el oxígeno y los electrones disociados anteriormente. El resultado de dicha reacción es agua o vapor de agua y calor. Mientras que los protones del hidrógeno atraviesan el electrolito, los electrones fluyen del ánodo al cátodo a través de un circuito externo (flechas rojas en Fig. 1.8), produciendo electricidad. Así pues, el electrolito no solo separa las dos reacciones del ánodo y el cátodo, sino que también permite el paso de los iones, cerrando de esta forma el circuito entre ambos electrodos. Las dos reacciones químicas producidas son las siguientes: Ánodo: 2 2 → 4 + + 4 − (1.1) Cátodo: 2 + 4 + + 4 − → 2 2 (1.2) Fig. 1.8 Representación gráfica de una celda de una pila PEM [10]. Pese a ser las pilas más recomendables en aplicaciones con UAVs, las PEMFC presentan algunos inconvenientes. En primer lugar, debido a su baja temperatura operacional (inferior a 150ºC), las cinéticas de reacción son muy lentas. Para aumentar la velocidad de ambas reacciones se requieren de catalizadores hechos con metales nobles, siendo el platino el más común pero también el más caro. Por otro lado, es de suma importancia tener una muy buena pureza del hidrógeno para el correcto funcionamiento de la pila, teniendo que ser idealmente mayor a 99.97%.
10 Estudio de un dron propulsado por pila de hidrógeno para transportar órganos de trasplante 1.2.2 Comparativa entre sistemas de propulsión Todos los sistemas de propulsión se caracterizan en potencia y cantidad de energía almacenada. En los drones, la potencia hace referencia a la capacidad de sustentación o de levantar más peso, mientras que la energía vendría a ser el tiempo de vuelo en el aire. Las pilas de combustible, al igual que los motores de combustión interna, son capaces de generar corriente durante horas siempre y cuando estén recibiendo continuamente energía en forma de combustible. Esto no sucede así en las baterías de litio convencionales, cuya autonomía se ve limitada por su tamaño o almacenamiento que disponen. Así pues, las baterías están limitadas en potencia y energía, mientras que las pilas o los motores de combustión están limitados únicamente por su potencia, ya que la energía viene determinada por el almacenamiento del tanque o depósito de combustible. Pese a que los motores de combustión interna funcionan de manera parecida a las pilas de hidrógeno en este aspecto, son muchas las diferencias que existen entre ambos métodos de propulsión. En primer lugar, las pilas de combustible son capaces de transformar la energía química almacenada en los reactantes en energía eléctrica, sin tener que transformarse en energía térmica y mecánica previamente. Esto hace que tengan una eficiencia mucho mayor que la de los motores de combustión interna, además de ser mucho menos ruidosas. Además, las pilas no requieren de un mantenimiento exigente y costoso, ya que no funcionan con actuadores mecánicos. Sin embargo, el principal inconveniente de los motores de combustión es su contaminación, y a día de hoy esto es precisamente algo muy importante a tener en cuenta a la hora de escoger un método propulsor para nuestro dron. En lo que respecta a las baterías de litio convencionales, estas también transforman la energía química almacenada directamente en energía eléctrica sin necesidad de pasar por otras etapas, teniendo así una eficiencia muy alta. Su principal virtud es la cantidad de potencia que pueden entregar por kg de peso, conocida como densidad de potencia. Esta característica es fundamental en la mayoría de drones, pues los motores pueden requerir mucha potencia en momentos puntuales, como en el despegue o en cambios bruscos de velocidad. Por otro lado, las pilas y los motores de combustión interna ofrecen una mayor densidad de energía que las baterías, por lo que pueden almacenar una mayor cantidad de energía y tener una mayor autonomía. Para comparar los sistemas de propulsión mencionados en términos de densidad de potencia y densidad de energía, véase la Fig. 1.9. Un factor muy importante a considerar a la hora de decidir qué sistema de propulsión es el más adecuado para el dron, es saber la autonomía que se requiere para la operación que se quiere realizar. Y es que, con una misma pila, puedes aumentar significativamente la autonomía del dron simplemente cambiando el tanque de hidrógeno por uno de mayor volumen. Si quisiéramos tener el mismo incremento en autonomía usando baterías, el peso aumentaría de forma exponencial. Es por ello que solo es rentable usar pilas de combustible
Marco teórico 11 de hidrógeno si la autonomía de nuestra misión es suficientemente larga como para amortizar el peso de la pila. Fig. 1.9 Comparativa entre pilas de combustible y otros métodos de propulsión [11]. 1.2.3 Sistema de propulsión híbrido Como se ha mencionado anteriormente, los drones, y especialmente los multirrotores, están continuamente realizando cambios de velocidad para poder estabilizarse o desplazarse. Esto implica que en muchas ocasiones sea necesario un nivel de potencia que la pila sola no puede proporcionar. Es por ello que, a menudo, las pilas se hibridan con baterías de litio. Además, la mayoría de pilas PEM para drones incorporan la funcionalidad de recargar la batería híbrida cuando la potencia no es muy demandada. Así pues, la idea es que el dron tenga una pila PEM suficientemente potente para ser propulsado en vuelo de crucero, y tener la ayuda de las baterías de litio en ocasiones que se requiera de mayor potencia, cómo en el despegue. De esta forma, el sistema híbrido puede aprovechar las mejores cualidades de ambas fuentes de energía: • Pilas PEM: alta densidad energética pero baja entrega de potencia o capacidad de descarga. • Baterías de litio: baja densidad energética pero mayor entrega de potencia o capacidad de descarga.
12 Estudio de un dron propulsado por pila de hidrógeno para transportar órganos de trasplante 2 CAPÍTULO 2. ESTADO DEL ARTE En este segundo capítulo se concentra el conocimiento existente y necesario más actualizado que contribuye a resolver el problema de investigación en curso; esto es, el traslado de órganos a largas distancias mediante un dron propulsado por pila de hidrógeno. Se han mencionado los proyectos más similares, ya sea porque consisten en drones que transportan material sanitario o porque son propulsados por pilas de combustible de hidrógeno. 2.1 Proyectos similares En la actualidad, existen numerosas empresas dedicadas al transporte de paquetería mediante drones, ya sea para transportar alimentos, material sanitario o cualquier otro tipo de mercancía. Si bien es cierto que se han desarrollado pilas de combustible desde hace ya muchos años, la mayoría de drones de transporte siguen usando baterías de litio. Esto es debido a que no es una tecnología muy conocida y aún hay pocas empresas involucradas en su fabricación. Sin embargo, la mayor autonomía que aportan las pilas de combustible de hidrógeno frente a las baterías convencionales en drones ha supuesto que nuevas empresas hayan valorado esta alternativa cómo medio principal de propulsión. 2.1.1 DS30 - Doosan Mobility Innovation Ganadora del premio a la innovación en la categoría de drones y sistemas no tripulados en la feria de electrónica más reconocida del mundo (CES 2020), Doosan ha apostado por el transporte de material sanitario con un dron propulsado con una pila de combustible de 2.600 W [12]. El dron DS30 fue capaz de transportar suministros médicos en las Islas Vírgenes de los Estados Unidos, volando una distancia de unos 69 km. Además, el 16 de abril de 2020, a raíz de la pandemia del COVID-19, el DS30 distribuyó unas 15.000 mascarillas a los residentes de tres pequeñas islas de Corea del Sur. El dron es propulsado por 8 motores y tiene un peso máximo al despegue de 24,9 kg con una carga de 5 kg.
Estado del arte 13 Fig. 2.1 Doosan DS30 con suministros médicos [13]. 2.1.2 Proyecto de la Universidad de Maryland En este proyecto, físicos, investigadores e ingenieros de la Universidad de Maryland desarrollaron un octocóptero con la finalidad de transportar órganos y tejidos para ser trasplantados. El 19 de abril de 2019, este dron transportó, por primera vez y satisfactoriamente, un riñón para una paciente del hospital de Baltimore [14]. En este caso, el dron fue propulsado por baterías de litio y su vuelo tuvo una duración aproximada de 5 minutos. Fig. 2.2 Dron de la Universidad de Maryland [15]. 2.1.3 Wingcopter Se trata de un dron híbrido VTOL de ala fija que cuenta con 4 motores que rotan en función del tipo de vuelo. El dron es propulsado por baterías de litio y tiene un peso máximo al despegue de 16 kg, con una carga de pago máxima de 6 kg [16]. El dron en cuestión es capaz de volar una distancia de hasta 120 km sin carga y 45 km con su máxima carga. Se usa para transportar todo tipo de paquetería, como servicio postal, medicinas o vacunas.
14 Estudio de un dron propulsado por pila de hidrógeno para transportar órganos de trasplante Fig. 2.3 Dron híbrido Wingcopter [16]. 2.1.4 Zipline A diferencia del resto de drones mencionados, el Zipline tiene una configuración de ala fija. Desde 2016, la empresa Zipline ha transportado suministros médicos a zonas de difícil acceso en Ruanda, Ghana, Filipinas, India y Estados Unidos [17]. Cuenta con un total de más de 40.000 entregas, las cuales se dejan caer en paracaídas cuando el dron sobrevuela la zona de destino. De este modo, el dron puede hacer envíos a cualquier sitio sin necesidad de una pista de aterrizaje. Puede transportar hasta 1,75 kg de carga en un rango de 80 km y volar a una velocidad de en torno a 100 km/h. Fig. 2.4 Dron Zipline dejando caer suministros médicos [17]. 2.1.5 BSHARK Narwhal 2 El Narwhal 2 es un multirrotor que funciona con pila de combustible de hidrógeno de 800 W. El dron se caracteriza por su gran autonomía, que llega hasta las 2 h de vuelo con un tanque de hidrógeno de tan solo 3,5 L. Su autonomía y el rango de 30 km que puede alcanzar hace que sea un dron ideal para inspección industrial. Pesa 6,6 kg y puede llevar una carga de hasta 1 kg.
Estado del arte 15 Fig. 2.5 BSHARK Narwhal 2 [18]. 2.1.6 Hycopter Otro dron propulsado con hidrógeno es el Hycopter de la empresa HES Energy Systems. Cuenta con una pila de 1,5 kW y un peso máximo al despegue de 16,5 kg, incluyendo una carga máxima de 2,5 kg. A diferencia del resto de drones, en este cabe la posibilidad de cambiar el tanque que almacena el hidrógeno, que está disponible en tres medidas distintas. Con el tanque más grande (12 L) y sin carga, el dron es capaz de sustentarse en el aire durante 3 horas. Fig. 2.6 Hexacóptero Hycopter [19]. 2.2 Pilas de hidrógeno en el mercado Hasta la fecha de publicación de este documento, el mercado de las pilas de combustible de hidrógeno para drones no es muy extenso, y las empresas dedicadas a su fabricación son realmente pocas. Las pilas disponibles en el mercado que generan una potencia continua de entre 0,8 kW a 3 kW se pueden ver en la Tabla 2.1.
16 Estudio de un dron propulsado por pila de hidrógeno para transportar órganos de trasplante Tabla 2.1 Pilas de hidrógeno del mercado (Fuente: Elaboración propia). PEMFC Potencia nominal (kW) Peso (kg) Voltaje de salida (V) 1 2 32,4 – 51,3 HES AEROSTAK 1,5 3,5 32,4 – 51,3 2 3,8 37 - 59,8 1 2,2 24 - 56 BMPower 2 4,4 24 - 56 3 6,6 24 - 56 0,8 0,93 19,6 – 25,2 Intelligent Energy 2,4 4,4 40 - 70 1 3,98 32 - 55 G-HFCS 2 5,8 24 - 40 3 7 40 - 72 Aunque se suelen denominar pilas de combustible, en realidad se tratan de módulos FCPM (del inglés Fuel Cell Power Module), ya que también incluyen un centro de control y un ventilador para la refrigeración. El centro de control es donde se encuentra toda la electrónica necesaria para gestionar la distribución de potencia, controlar el estado de la pila y tener una hibridación óptima con la batería de litio. Este módulo se encarga de gestionar correctamente la potencia tanto de la pila como de la batería, así como de cargar la batería cuando la demanda de potencia lo permite. Por otro lado, el ventilador ayuda tanto a refrigerar la pila como a recoger el oxígeno del aire para su funcionamiento. 2.3 Depósito para almacenar el hidrógeno Como hemos visto en el Capítulo 1, para que las pilas PEM funcionen se requiere de hidrógeno y oxígeno. Pese a que este último se puede obtener directamente del aire, sí que es necesario almacenar el hidrógeno en un depósito o tanque diseñado específicamente para ello, que debe de ir a bordo del mismo dron. Los tanques de hidrógeno más empleados son los COPV (del inglés Composite Overwrapped Pressure Vessels). Están formados por un revestimiento delgado no estructural que es envuelto por un compuesto de fibra (sí estructural), normalmente de carbono o de kevlar. Dicho revestimiento situado entre el fluido y el compuesto tiene la función de evitar pérdidas o fugas del gas, y puede ser fabricado de aluminio, acero, o polímeros. • Tipo I: Son los recipientes más comunes para almacenar líquidos y gases, fabricados en acero. Son baratos de producir, pero algo pesados.
Estado del arte 17 • Tipo II: Son fabricados también en acero, pero con un refuerzo de fibra de vidrio o carbono. Son algo más resistes que los COPV tipo I y menos pesados. • Tipo III: Son recipientes de fibra de carbono con un recipiente interior de aluminio o acero. Son más costosos que los anteriores, pero pueden soportar mucha más presión. • Tipo IV: Están fabricados con fibra de carbono y tienen un revestimiento de polímeros en su interior. Son los más ligeros, resistentes y costosos. Tabla 2.2 Tanques de hidrógeno tipo IV para UAVs disponibles en el mercado (Fuente: Elaboración propia) Hidrógeno Energía Modelo Volumen (L) Masa (kg) Dimensiones (mm) (g) (Wh) HC011 10,8 4,3 240 Ø x 565 - - 9 3,8 182 Ø x 543 185,7 3091 CTS/HES 13 5,5 225 Ø x 545 268,2 4465 HES F7.2 7,2 3,5 161 Ø x 545 148 2420 2.4 Tecnología en los motores Los motores empleados en la gran mayoría de drones son los eléctricos sin escobillas o brushless en inglés. La principal ventaja frente a los que sí tienen escobillas es su mayor durabilidad, ya que al no haber ningún tipo de rozamiento les permite tener un ciclo de vida mucho mayor. Asimismo, apenas tienen emisión de interferencias electromagnéticas (EMI) y son menos pesados, más económicos y más silenciosos. Los motores brushless se caracterizan por tener un gran número de electroimanes o bobinas, que están conectadas entre sí en pares específicos. Mediante un controlador de velocidad (ESC), las bobinas se activan en secciones distintas, de modo que el campo magnético creado les hace girar. Este sistema les permite rotar tanto en sentido horario como en el sentido contrario a las agujas del reloj, dependiendo de las bobinas que se exciten. Aunque existen multitud de parámetros que hacen referencia a los motores, quizá el más importante es la constante de velocidad o KV. La constante de velocidad determina las RPM por cada voltio aplicado sin carga (carga hace referencia a cualquier fuerza aplicada en el motor, como podría ser el peso de una hélice). Básicamente, un motor con un parámetro KV elevado (p.ej., 2000 KV) girará la hélice más deprisa, pero con un momento de fuerza pequeño, mientras que un motor con KV bajo (p.ej. 100 KV) girará la hélice a menos revoluciones, pero con un mayor par motor. Normalmente las hélices pequeñas se asocian con KVs altos y las hélices grandes con KVs bajos.
También puede leer