Tren de engranajes planetarios tipo "Cyclo"
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación
Asociación Española de XVIII CONGRESO NACIONAL
Ingeniería Mecánica DE INGENIERÍA MECÁNICA
Tren de engranajes planetarios tipo “Cyclo”
F.J. Rubio, F.J. Valero, J.L. Suñer, V. Mata
Dpto. Ingeniería Mecánica y de Materiales. Universidad Politécnica de Valencia
frubio@mcm.upv.es
Resumen
Este artículo se dedica a los trenes de engranajes planetarios cicloidales tipo “Cyclo”, más conocidos como
engranajes “Cyclo” creados por el ingeniero alemán Lorenz Braren. Los primeros engranajes de este tipo
vieron la luz en 1931, después de unos años de ensayos (1927-1930). Lorenz trabajaba en esa época como jefe
de diseño en la compañía Deckel en Munich (inicialmente dedicada a fabricación de maquinas herramientas
que después creció en el sector de piezas de precisión para cámaras fotográficas). Allí ideo este tipo de
engranajes planetarios que se basaban en el funcionamiento del obturador “Compur” para cámaras
fotográficas. Las partes móviles de ese obturador inspiraron a Lorenz a crear este nuevo tipo de engranajes
planetarios. El concepto se basaba en una leva de disco cuyo perfil describía una curva de tipo cicloide. Así fue
como el reductor “Compur” vio la luz. Con el fin de concentrarse en el desarrollo ininterrumpido de este
reductor, Lorenz Braren dejó la compañía Deckel y después de patentar su invento fundó su propia compañía
“Cyclo”. Un año más tarde (1932) en la feria de Leipzig, dio a conocer su nuevo reductor con el nombre de
“Cyclo”. El reductor provocó el interés de los visitantes, entre ellos la delegación de un consorcio japonés. Una
compañia de este consorcio (Sumitomo Heavy Industries Ltd. una de las mayores empresas de ingeniería
mecánica en Japón) solicitó la licencia para la construcción del engranaje “Cyclo” en Japón. Sumitomo
empezó 5 años más tarde (1937) con la producción de una serie de este engranaje bajo la denominación “Cyclo
Drive”. En poco tiempo se volvió el líder en el mercado en Japón. En 1974, Sumitomo tomó parte en el capital y
en la administración de la compañía “Cyclo” de Lorenz. La compañía alemana fue absorbida completamente
por Sumitomo Heavy Industries en 1994 y se extendió por toda Europa. Trabaja desde 2003 en todo el mundo
bajo la marca paraguas Sumitomo Drive Technologies.
En este artículo se analiza el nacimiento y evolución histórica de este tipo de trenes planetarios además de las
aplicaciones más importantes, sus principales ventajas, así como su principio de funcionamiento.
HISTORIA
El ingeniero alemán Lorenz Konrad Braren nació el 30 de mayo de 1886 en
Borgholz, Alemania. Sus padres, Brar e Ida Braren, eran naturales de la isla Föhr.
Lorenz formaba parte de una familia numerosa (tuvo 12 hermanos) y era el único que
hablaba el idioma frisón (idioma local de la isla) con la que siempre mantuvo una
relación de cercanía.
La época de la infancia y juventud de Lorenz Braren se correspondió con tiempos de
fuertes cambios económicos y sociales. Por ejemplo, en el año 1886 Carl Benz
construyó lo que se considera el primer coche del mundo. También en ese año nació
el gran pintor austríaco, exponente del expresionismo Oskar Koboschka y el rey Luis
II de Baviera se suicida. De 1885-1889 tuvo lugar la exposición mundial de Paris,
donde fue construida la Torre Eiffel. En 1903 se abrió el Museo Alemán en Múnich.
En 1903 comienzan sus años de formación y viajes. Después del examen de
bachillerato Lorenz se incorporó como grumete en un barco de vapor de la línea Hamburgo-América del Sur por
mediación de su abuelo. Pero el mal de mar en su primer viaje destruyó sus planes. Por eso se decidió a favor de
la ingeniería mecánica. Hizo sus primeras experiencias como voluntario en una cerrajería y fábrica de máquinas.
F.J. Rubio et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) 2 Durante estos años seguía la llamada de su tiempo. Muchos europeos se iban al “Nuevo Mundo”. En 1907 culminaba la ola de inmigración en los Estados Unidos culminaba (1.28 millones). A partir de 1905 se comienza la fabricación en serie de Ford en Detroit. En 1912 se fabricaban zepelines en serie y en ese mismo año se hundió el Titanic y Charlie Chaplin rodó su primera película. En 1906 se trasladó a América, en 1910 regresa a Alemania, en 1912 vuelve de nuevo a Estados Unidos donde se casa con su prometida en 1913. En 1920 vuelve a Alemania, y se reencuentra con su esposa y sus tres hijos que habían adelantado su vuelta. Tenía por entonces 34. Trabajaba en el diseño de una central eólica e investigaba los efectos de marea baja y alta sobre los canales de las marismas en Wattenmeer, Alemania. En el año 1922 Lorenz Braren era diseñador jefe de Deckel Company en Múnich. La compañía Deckel producía dispositivos de precisión, entre otros el Obturador Compur (para máquinas fotográficas). Fueron las partes móviles de este obturador las que inspiraron a Lorenz a crear ese nuevo tipo de trenes planetarios. El concepto se basaba en una leva de disco cuyo perfil describía una curva de tipo cicloide. Así fue como el reductor “Compur”, predecesor del reductor “Cyclo” vio la luz. Con el fin de concentrarse en el desarrollo ininterrumpido de este reductor, Lorenz Braren dejó la compañía Deckel y después de patentar su invento fundó su propia compañía “Cyclo”. Un año más tarde (1932), en la feria de Leipzig, dió a conocer su nuevo reductor con el nombre de “Cyclo”. El reductor provocó el interés de los visitantes, entre ellos la delegación de un consorcio japonés. Una compañía de este consorcio (Sumitomo Heavy Industries Ltd., una de las mayores empresas de ingeniería mecánica en Japón) solicitó la licencia para la construcción del engranaje “Cyclo” en Japón. Sumitomo comenzó 5 años más tarde (1937) con la producción de una serie de este engranaje bajo la denominación “Cyclo Drive”. En poco tiempo se volvió el líder en el mercado en Japón. En 1974, Sumitomo tomó parte en el capital y en la administración de la compañía “Cyclo” de Lorenz. La compañía alemana fue absorbida completamente por Sumitomo Heavy Industries en 1994 y se extendió por toda Europa. Trabaja desde 2003 en todo el mundo bajo la marca paraguas Sumitomo Drive Technologies. Durante la Segunda Guerra mundial las relaciones de negocios entre las dos compañías se interrumpieron. En el año 1944 la planta “Dachauer Strabe” en Munich fue destruida. Poco después del final de la guerra, Sumitomo, por propia iniciativa transfirió las royalties acumuladas. Ese dinero ayudo a la reconstrucción de una nueva planta en Markt Indersdorf. Lorenz Braren murió en 1953 y su hijo Rodolfo Braren se hizo cargo de la dirección de la compañía. La modernizó, se adquirieron nuevas máquinas, un sistema informático y se construyo un gran complejo de oficinas. En 1974, después de décadas de estrecha colaboración, Sumitomo Heavy Industries Ltd entró en el capital y la dirección de la compañía. Además de fabricar el reductor “Cyclo”, se hizo cargo de la distribución en Europa que realizaba hasta entonces su socio. Ambas empresas trabajaban tanto en el producto como en su desarrollo técnico. Con la alianza con Sumitomo, las actividades a nivel internacional se podrían ampliar. La cercana conexión financiera con la rama tecnológica motriz de Sumitomo Heavy Industries Ltd en Tokio, que existía desde 1974, acabó con la completa absorción de la compañia “Cyclo” dentro de la alianza de la compañía matriz. La amplia gama dentro de la tecnología motriz mecánica de Sumitomo Heavy Industries Ltd está disponible al mercado europeo. Los clientes europeos se benefician de la dinámica innovadora mundial, de un proveedor líder, además de la seguridad de una red de distribución y puntos de servicio global y cercano. La sistemática construcción de una amplia red de servicios europea se ha estado llevando a cabo desde 1995 para acercarse más aun si cabe al cliente. Los centros de “Cyclo” están ahora presentes en parís (Francis y Hull (Gran Bretaña) además de oficinas de venta en Dusseldorf. Otros centros de “Cyclo” se abrieron en Eindhoven y Malmo en 1997. Otros centros aparecieron en Italia, España, Austria y Suiza entre 1998 y 1999. Comerciantes, representantes y consejeros técnicos en una infinidad de ciudades y países aseguran la presencia de un socio fiable y cercano. APLICACIONES El campo de las aplicaciones reales y potenciales del tren de engranajes planetario “Cyclo” es inmenso. Algunas de ellas son:
Tren de engranajes planetarios tipo “Cyclo” 3
1. Sistemas de transporte.
2. Mezcladores y agitadores.
3. Centrifugadoras.
4. Máquinas metalúrgicas.
5. Plantas de tratamiento de agua.
6. Maquinaria de construcción.
7. Robótica.
8. Industria alimentaria.
9. Industria textil
10. Industria de la madera
11. Industria Quimica
12. etc., etc.
Ilustremos algunas de esas aplicaciones con imágenes.
Centrifugadoras de separación
sólido-líquido: amplia gama
para adaptarse a la aplicación
concreta (tipo de árbol de
salida, velocidades, par de
salida, etc)
Robótica: operaciones de
precisión, con inercia reducida
gran rigidez y gran capacidad
de sobrecarga.
Mesas rotativas en uno de los
microscopios más grandes del
mundo: suavidad de acción,
diseño compacto y
funcionamiento compacto eran
sus principales características.
Industria de la madera:
Reductores para
accionamiento del
transportador. La gran
capacidad de sobrecarga,
funcionamiento sin
mantenimiento y seguridad
contra las averías fueron
ventajas decisivas.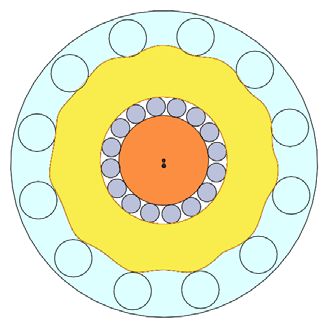
F.J. Rubio et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) 4
Planta depuradora: diseño
compacto, capacidad de
absorción de impactos y
mínimo mantenimiento.
Industria alimenticia: control
de agitadores
Tratamiento de mezclas
(soluciones): control de
centrifugadoras de
decantación
Industria aeroespacial y
telecomunicaciones: :
movimiento de antenas de
telecomunicaciones
VENTAJAS
La mayoría de las siguientes ventajas provienen del hecho de tratarse de un engranaje sin dientes convencionales
y por tanto se evitan los inconvenientes asociados a este tipo de engranajes (roturas, sobrecargas, ruido,
vibraciones, etc).
De forma esquemática, algunas de las ventajas más importantes que ofrece este tipo de engranajes se pueden
resumir en los siguientes puntos:
1. Construcción compacta y ligera. En muchas aplicaciones la falta de espacio es una variable de diseño
principal. En comparación con las transmisiones convencionales, este tipo de reductores son más ligeros
y compactos.
2. Grandes relaciones de reducción. Es una de las características que se persigue con los trenes de
engranajes y que “Cyclo” ofrece.
En una sola etapa desde 6:1 a 87:1 incluso 119:1
Dos etapas desde 102:1 a 7569:1
Con tres etapas 658503:1 (87x87x87).
3. Gran rendimiento al no haber perdidas por fricción (no hay fricción por deslizamiento).
4. Gran capacidad para absorber sobrecargas: no es posible la rotura de dientes. En comparación con los
reductores de engranajes cilíndricos convencionales, en los que engranan de uno a dos pares de dientesTren de engranajes planetarios tipo “Cyclo” 5
como máximo, en los reductores “Cyclo” son varias las secciones que hacen contacto con los pivotes o
pernos externos. De esa forma la carga se distribuye de forma uniforme y permite una carga de impacto
de hasta el 500% del par nominal, por lo que son aconsejables cuando existen grandes picos de carga.
Además, no es posible un fallo catastrófico como pudiera aparecer en engranajes de ruedas dentadas
convencionales.
5. Funcionamiento silencioso. Al eliminar los dientes de engranajes que continuamente engranan y
desengranan se elimina el ruido producido.
6. Equilibrio dinámico. Momento de inercia pequeño. Como solo el eje motriz excéntrico gira a alta
velocidad, el impulso angular es extraordinariamente bajo. Se traduce en una práctica ausencia de
vibraciones y en tiempos de respuesta cortos (en puesta en marcha, paradas e inversiones de giro)
7. Fácil mantenimiento
8. Fiabilidad y longevidad. Las bajas perdidas por fricción y una distribución compensada de la carga
protegen a los reductores “Cyclo” contra el desgaste, que unido al uso de materiales robustos y de
mínimo mantenimiento contribuyen a la fiabilidad y longevidad del producto. Por tanto desde el punto
de vista económico, la larga vida en servicio hacen de estos reductores una inversión rentable.
PRINCIPIO DE FUNCIONAMIENTO
Básicamente, el concepto de reductor “Cyclo” consiste en un disco con perfil cicloidal accionado por un eje
excéntrico que rueda dentro de un anillo con pivotes. El disco gira a velocidad reducida en sentido opuesto al eje
excéntrico. El uso de rodamientos de rodillos garantiza una pura transmisión rotativa sin apenas perdidas por
fricción. El reductor Cyclo es diferente de los mecanismos de engranaje de perfil de evolvente. Si se analiza
detenidamente se puede observar que consta de una ingeniosa combinación de dos mecanismos:
1. Una combinación de engranaje planeta (disco con perfil cicloidal) y un sol interno fijo (anillo con
pivotes circulares). El numero de dientes del planeta es uno o dos menores que lo pivotes que tiene el
sol.
2. Un mecanismo de conducción de velocidad constante.
Para entender el principio de funcionamiento de un tren de engranajes planetarios interno convencional, véase la
Fig. (1).
Sol (S fijo)
Velocidad de rotación del planeta
Planeta (P) ω2
Brazo Portaplanetas (B) ω1
Velocidad de rotación del brazo
portaplanetas
Eje rotación
Fig. 1: Principio de Funcionamiento un Tren de Engranajes Planetario Epicicloidal
En la Fig. (1) se pueden observar los elementos que forman parte del mismo: el planeta (con una velocidad de
rotación ω2), el sol (fijo) y la barra portaplanetas (eje excéntrico y con una velocidad de rotación ω1).
La ecuación de Willis aplicada a un tren e engranajes, considerando S la rueda de salida, E la rueda de entrada, B
el brazo portaplanetas, Ze el número de dientes de la barra de entrada y Zs el número de dientes de la barra de
salida, se expresa así:
(1)F.J. Rubio et al. / XVIII Congreso Nacional de Ingeniería Mecánica (2010) 6
Considerando el sol fijo como rueda de entrada ( 0 , el planeta como rueda de salida con velocidad
y la velocidad del portaplanetas coincidente con la velocidad del eje de rotación, la velocidad
del planeta se puede expresar asi:
· 1 (2)
Simplificando, la relación de velocidades entre el eje de rotación (brazo portaplanetas) y el planeta es:
1 (3)
Es decir
(4)
La relación de velocidad es máxima cuando el número de dientes del sol es mayor que el del planeta en una
unidad o dos.
Puesto que el sentido de giro del planeta es contrario al sentido de giro del eje
Si 1, la relación de velocidades es:
(5)
Z
Si 2, la relación de velocidades es:
(6)
Z
De forma que la velocidad de rotación del planeta, en términos de la velocidad de rotación del eje y del número
de dientes del planeta es:
ω ω k 1,2 (7)
Z
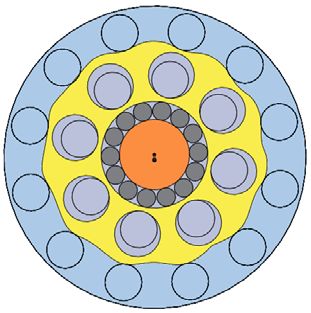
Los pivotes circulares del sol engranan con los dientes cicloidales del planeta evitando la interferencia de dientes
convencional (véase la Fig. (2)).
Velocidad de rotación del planeta cicloidal
ω2
ω1
Velocidad de rotación del eje
Eje de rotación
Sol interno con pivotes
Fig. 2: Tren de Engranajes Planetario Cicloidal: Planeta Cicloidal y Sol con pivotes
La rotación del planeta alrededor de su propio eje es la rotación con que se va a mover el eje de salida. Para
transmitir ese movimiento al eje se salida se emplea el mecanismo de velocidad constante que se observa en la
Fig. (3).Tren de engranajes planetarios tipo “Cyclo” 7
2e
Planeta
(disco cicloidal)
Op
Os
e (excentricidad)
Pivotes del
eje de salida
Fig. 3: Mecanismo de Velocidad de Rotación constante
En el mecanismo completo de la figura 4, los pivotes del eje de salida (de baja velocidad) se encuentran
uniformemente repartidos sobre un circulo que es concéntrico con el eje del sol Los pivotes transmiten el
movimiento de rotación del planeta mediante rodadura interna sobre la circunferencia de los agujeros de cada
disco planeta o disco cicloide. La diferencia entre el diámetro de los agujeros y los pivotes del eje de salida es
dos veces el valor de la excentricidad del eje de entrada excéntrico. Este mecanismo transmite suavemente la
rotación del planeta alrededor de su propio eje al eje de salida (de baja velocidad)
2e
Planeta
(disco cicloidal) ω2
ω1
e (excentricidad)
Pivotes del Pivotes del
eje de salida sol
Fig. 4: Combinación del Tren Planetario Cicloidal y el Mecanismo de Velocidad de Rotación Constante
REFERENCIAS
[1] Francisco Gozalvez, Apuntes, Univ. Politécnica de Valencia, Valencia (2008).
[2] Sumitomo Cyclo Europe, Tecnologia de transmisión para el futuro a nivel mundial. Nº CAT 999 204-08/97
[3] Sumitomo Drive Technologies, Motion Control Drives, Nº F2003E-1.3
[4] Cyclo Getriebebau, Lorenz Braren, Markt Indersdorf (1986).También puede leer