A - Presentación de la tarjeta
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

Manual KK2.0 Multi-rotor LCD Flight Control Board A - Presentación de la tarjeta Hola a todos. He concebido esta nueva tarjeta para que su utilización sea lo más simple posible, siendo muy superior a la KK de la primera generación. Los detractores probablemente no estén muy entusiasmados. La tarjeta mantiene su arquitectura en torno a un viejo micro controlador AVR. Pero esta vez, funciona con un cristal a 20 Mhz. La frecuencia y la estabilidad de las señales de control de los motores son mucho mejores que antes. Algunas de las mejoras: Supresión de los molestos potenciómetros, que tenían una buena función al poderse utilizar tanto a la izquierda como a la derecha. Supresión de la inversión de los Gyros bajo el riesgo de volar de espaldas. Auto Level: estabilización automática del multicopter en posición horizontal. Sigo trabajando aun en la mejora de esta función. De momento solo se basa en las informaciones recibidas por los acelerómetros. Pronto pondré en servicio un algoritmo AHRS como los modelos estrella del mercado, dado que es más eficiente.

No se precisa tener un PC bajo el brazo. Todos los ajustes se realizan desde la propia tarjeta gracias a la pantalla LCD: selección del modelo, ajuste de la sensibilidad de las palancas de la radio, etc. Un menú especial permite verificar la información transmitida por la radio (sentido de las palancas, por ejemplo) antes incluso del primer despegue y así poder centrar y ajustar los mandos. Los nuevos giróscopos están mucho menos sometidos a una posible perdida de sensibilidad con el paso del tiempo o en función de la temperatura. El comportamiento de la tarjeta será constante durante todo el vuelo. Alarma de nivel de tensión de la batería, ajustable a casi 0,1 voltios. El orden y sentido de giro de los motores aparecen directamente en pantalla. Posibilidad de personalizar las mezclas de A a Z. Entregare el código OpenSource en la primera puesta al día. Pero atención, estará siempre escrito en un diabólico lenguaje ensamblador…. KapteinKuk

B.- Alimentación eléctrica
La tarjeta KK2.0 funciona bajo una tensión de 5V. Es alimentada por el BEC del ESC y conectada al pin
del motor M1.
Los pines 5V de las salidas de los motores del M2 al M8 están unidas entre si. De este modo los ESC
que estén conectados, aseguran la alimentación de los servos. Si el modelo utiliza numerosos servos
(por ejemplo KK utilizada para estabilizar un avión), podría ser necesario asegurar la alimentación con
varios BEC’s o una batería de 5V.
No es necesario retirar el hilo 5V (hilo rojo) de los ESC’s conectados a las salidas M2 a M8, salvo si se
trata de Switching BEC. En efecto, un solo Switching BEC debe ser utilizado.
C.- Primera instalación
1.- Retire las hélices de los motores (o bien desconecte uno de los tres cables de control de cada
motor). Las hélices no se deberán volver a montar antes del apartado 15. En los apartados
siguientes, va a manipular los botones de la tarjeta, los que se encuentran cerca de las cuchillas de
su engendro volador. ¿Desea conservar sus dedos?
2.- La tarjeta se utiliza en el sentido natural de lectura del LCD. La parte superior de la tarjeta es el
lado donde se hayan los dos mini giróscopos, la parte inferior es donde se hayan ubicados los
cuatro botones.
3.- Instale la tarjeta de control sobre el chasis. La parte superior de la tarjeta debe situarse hacia la
parte delantera del multicopter, la parte inferior debe estar orientada hacia la parte posterior del
multicopter.
4.- Conecte el receptor radio a los pines situados en la parte IZQUIERDA. El cable de masa (negro o
marrón) debe estar situado hacia el exterior de la tarjeta. De arriba hacia abajo el orden es el
siguiente:
.Roll (Alabeo. Derecha/Izquierda)
.Pitch (Profundidad. Adelante/Atras)
.Throttle (Motor/Gas)
.Yaw (Giro sobre su eje. Rotación sobre sí mismo)
5.- El quinto canal, AUX, puede ser conectado a una salida controlada por un interruptor de la emisora
de radiocontrol. Podrá de este modo cambiar el modo de estabilización en pleno vuelo. En el modo
estabilizado, la tarjeta se encarga de mantener la actitud del modelo. Ella misma se opone a las
ordenes que usted de sobre los ejes Pitch y Roll, pero deja el Yaw y el Throttle completamente
libres.
6 .- Conecte los ESC’s y los servos en los pines situados a la derecha de la tarjeta. Las salidas motor
están numeradas de 1 a 8 partiendo de la parte superior de la tarjeta. El cable de masa (negro o
marrón) debe estar orientado hacia el exterior de la tarjeta.
7.- En su emisora de radiocontrol cree un nuevo modelo del tipo AVION.
8.- Conecte la batería del aeromodelo con el fin de alimentar la tarjeta. Pulse sobre el botón [ENTER]
para visualizar el menú y sitúese en el menú RECEIVER TEST. Mueva cada canal de la emisora y
verifique que la dirección que aparece corresponde con el movimiento de las palancas. En caso
contrario, invierta el canal correspondiente desde la emisora.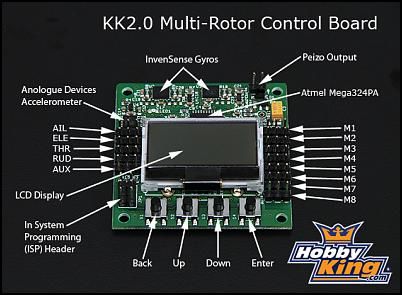
9.-Realice la misma operación con el interruptor asignado a la vía Auxiliar. Verifique que la tarjeta
visualiza ON en el canal AUX cuando el interruptor este situado en la posición deseada. En caso
contrario invierta el canal desde la emisora.
10.-Situé las palancas en punto neutro. Los valores de los cuatro canales deben estar en cero. Ajuste
mediante los trims o sub-trims de su emisora para realizar la correcta calibración.
11.- Sitúese en el menú Load Motor Layout y seleccione la configuración deseada. Si ninguna
configuración satisface sus necesidades, sitúese en el menú Mixer Editor para crear una
configuración personalizada.
12.-Sitúese en el menú Show Motor Layout y verifique los siguientes puntos :
La configuración es la deseada ¿?
Los motores y los servos están correctamente conectados a las correspondientes salidas motor ¿?
El sentido de rotación de cada motor es el correcto ¿?
Incline el aeromodelo en dirección a un motor. Este inicia correctamente su aceleración ¿?
13.- Sitúese en el menú PI Editor y verifique los valores de las ganancias. Utilice los valores por defecto
o bien introduzca valores que sepa usted que le den un buen resultado.
14.- Sitúese en el menú Sensor Calibration, coloque el aeromodelo totalmente plano e inicie la
calibración.
15.-Puede ahora montar de nuevo las hélices o volver a conectar los motores.
D.- Normas de Seguridad
1.- Antes de despegar, sitúe el aeromodelo en el suelo y retírese al menos cinco metros.
2.- Con los ajustes por defecto, la tarjeta debe ser armada antes de poder ser utilizada. Mientras que
la tarjeta permanezca desarmada, esta no enviara ninguna señal a los motores.
3.- Para armar la tarjeta, sitúe la palanca del gas a cero y desplácelo totalmente hacia la derecha. La
tarjeta emitirá un Bip y el LED se encenderá. La tarjeta esta ahora armada.
4.- Como medida de seguridad, desarme siempre la tarjeta antes de aproximarse al aeromodelo. Sitúe
la palanca del gas a cero y mueva la misma totalmente hacia la izquierda durante unos segundos.
La tarjeta emitirá un Bip y el LED se apagara. La tarjeta esta ahora desarmada.
E.- Comportamientos anómalos
El aeromodelo tiende a girarse a un lado Verifique las conexiones. Si utiliza una mezcla
personalizada, verifique todos los valores
El aeromodelo oscila y alcanza una altitud de Reduzca la ganancia P sobre los ejes Roll y
manera incontrolada después del despegue Pitch
El aeromodelo no es estable y cabecea hacia Aumente la ganancia P sobre los ejes Roll y
un lado Pitch
El aeromodelo deriva y no queda estacionario Es un tanto normal que el aeromodelo derive
por la acción del viento. Ajuste mediante los
Trims correspondiente para controlar la deriva.
Si debe trimar en exceso para mantener un
estacionario, verifique los ángulos y la
horizontalidad de los brazos así como de los
motores
El aeromodelo tiende a ir hacia adelante o Aumente la ganancia I sobre los ejes Roll y
retrocede al finalizar la traslación Pitch
F.- Contenido de los menús
PI Editor :
Ajuste de la ganancia de los ejes Yaw, Pitch y Roll. Utilice los botones [PREV] y [NEXT]
para situarse sobre el elemento que desea ajustar y pulse [ENTER]. Encontrara en el
menú Mode Settings una opción que le permitirá ligar los valores de ganancia sobre los
ejes Pitch y Roll. Sobre cada eje puede ajustar los siguientes valores.
• P gain
• P limit
• I gain
• I limit
Los valores Limit definen que proporción de la potencia debe ser aplicada a los motores
para un ajuste automático. 100 representa el 100%, es decir sin límite. El límite del
parámetro I es también conocido bajo el nombre de anti wind-up en los algoritmos de
cálculo PID. La limitación es sobre todo importante sobre el Yaw. Sin límite, la tarjeta
podría (tras los cálculos obtenidos sobre los valores de los captadores (acelerómetros y
giróscopos)) obtener una corrección importante y excesiva sobre el Yaw. Importante hasta
el punto se saturar los motores.
Algunos podrían encontrarse a 100% girando sin límite y otros a 0% parado. Una
situación así presentaría una imposibilidad de control sobre los ejes Pitch y Roll. Los
valores por defecto permiten al 30% (P-limit = 20 + I-Limit = 10) de la potencia de los
motores que será utilizada para una corrección del Yaw. Esto dejaría un 70% de potencia
a disposición de los ejes Pitch y Roll, los más importantes. Es mejor tener un multicopter
que gira sobre sí mismo que estrellado en el suelo. Aumentar el P-Limit del Yaw puede
volver al aeromodelo más sensible sobre este eje y su reacción más rápida.
A menos que este seguro que desea lanzarse en este tipo de ajustes, es aconsejable
dejar los valores de límite por defecto. Es inútil cambiarlos para ajustar correctamente las
ganancias PI.Receiver test :
Verifique los valores transmitidos por su emisora de radiocontrol.
Mode Setting :
Diferentes opciones de los parámetros de la tarjeta.
• Self Level :
como activar el modo estabilización.
• Stick :
Activa la estabilización al iniciar el rearme de la tarjeta, desplazando la palanca
del gas totalmente a la derecha.
Desactiva la estabilización al iniciar el desarme de la tarjeta, desplazando la
palanca del gas totalmente a la izquierda.
• AUX :
Activa o desactiva la estabilización moviendo el interruptor configurado para
controlar el canal AUX.
• I part of PI :
ON : los cálculos de estabilización se efectúan en base a los parámetros P e I de
cada eje.
OFF : los cálculos de estabilización únicamente se efectuaran en base a los
parámetros P de cada eje.
• Arming :
Como armar la tarjeta.
Stick : La tarjeta debe ser armada antes de poder ser utilizada. Ver el apartado D
Normas de seguridad.
On : la tarjeta permanece siempre armada. Atencion : por razones de seguridad
este modo no debe ser utilizado en multicopteros. Esta opción puede ser útil
cuando la tarjeta solo controlará servos, por ejemplo en el caso de ser utilizada
para estabilizar un avión.
• Link Roll Pitch :
On : los valores de la ganancia de los ejes Roll y Pitch toman automáticamente
los mismo valores.
Off : los valores de la ganancia de los ejes Roll y Pitch pueden ser modificados
independientemente. Esta opción puede ser utilizada en aeromodelos que no
posean el mismo peso en los diferentes ejes.
• Stick Scaling :
le permite ajustar a su gusto la respuesta de las palancas. Valores elevados
proporcionan una respuesta importante. Este parámetro corresponde al ajuste del
parámetro SCALESTICK en las diferentes versiones del firmware KapteinKuk4.7
para las tarjetas KKV1 (estándar, acro, agresivo y ultimátum). Puede ajustar el
valor Stick Scaling independientemente para los canales Yaw, Pitch, Roll y
Throttle. Es por tanto muy sencillo configurar su multicóptero para ser suave sobre
el Pitch y el Roll (ejemplo : 30) y muy sensible o nervioso sobre el Yaw (ejemplo :
50). Se pueden obtener los mismo resultados ajustando Exponenciales / Dual
Rates de los canales desde la emisora de radiocontrol. Los dos modos pueden
ser utilizados simultáneamente.• Misc. Settings :
Minimum Throttle :
Ajuste fino de manera que todos los motores arrancan al mismo tiempo cuando la
palanca del gas varia de su posición cero dando gas.
LCD Contrast :
Ajuste del contraste de la pantalla LCD. Si accidentalmente ajusta el contraste
hasta que el texto se haga invisible, siga el siguiente procedimiento.
Apague y encienda la tarjeta
Boton 4
Boton 3 (cuatro veces)
Boton 4
Boton 3
Boton 4
Boton 1
Boton 3 (36 veces)
Boton 4
Height Dampening :
Parámetro que controla el comportamiento del estabilizador de altitud. Este
parámetro, intenta compensar los movimientos en altitud que aparecen cuando
iniciamos una traslación o tras un golpe de viento, basándose en los valores que
proporciona el acelerómetro del eje Z. Al igual que en el PI Editor, usted puede
ajustar una ganancia y un límite. El valor 0 desactiva esta función. Para probarlo,
empiece con pequeños valores (30 y 10% en límite) y vaya aumentando en
función del comportamiento del aeromodelo.
Alarm 1/10 Volts : (Texto introducido tras mi experiencia en la correcta puesta en
marcha de este sistema de seguridad para el voltaje de la LIPO… )
Para poder controlar el nivel de tensión de nuestra batería, es imprescindible
realizar una conexión, mediante cable, entre un determinado punto de
nuestra tarjeta y el positivo de nuestra batería. De lo contrario, la tarjeta
no puede saber que voltaje existe en la batería ya que ella se alimenta
únicamente de los 5 voltios entregados por el BEC en la conexión M1. El
cable debe ser soldado en este punto del circuito de nuestra tarjeta.
Punto de conexiónPunto de conexión
Uniendo este punto con el positivo directo de nuestra LIPO y seleccionando en el
menú Alarm del menú Misc. Settings, podremos facilmente controlar el
nivel de nuestra bateria. Simplemente deberemos indicarle a la tarjeta a
que nivel de batería queremos que la alarma acustica nos avise. La
tensión deberemos representarla con 3 dígitos. Por ejemplo si queremos
que la alarma se dispare a una tension de 10,5 voltios deberemos
modificar el nivel de alarma a un valor de 105. El nivel de alarma es
seleccionable libremente. Tomad precauciones para no bajar en exceso
dicho valor. Las Lipos son muy susceptibles de quedarse inutilizadas si
abusamos mucho de su tensión mínima. No olvideis conectar el pequeño
buzzer que se suministra con la tarjeta para que la señal sea audible.
Self Level Settings :
Configura el comportamiento del estabilizador. Se deben utilizar valores muy
bajos para empezar e ir aumentando según el comportamiento del aeromodelo.
En la actual versión del Firmvare, el algoritmo del Auto-Level no está en su
versión final. En particular no gestiona bien los valores I-gain e I-limit. Deje estos
valores a 0.
Self-level Gain :
Fuerza la estabilización, más elevado con valores más altos.
Self-level Limit :
Limita la potencia con la que la estabilización tomara el mando sobre los motores.
Limitado de antemano con valores más elevados.
Sensor Test :
visualiza los valores entregados por los giróscopos y acelerómetros. Para un
correcto funcionamiento de la tarjeta todos los captadores deben visualizar OK.
Los valores deben variar cuando se inclina la tarjeta en todos los sentidos.
Sensor Calibration :
Siga las instrucciones que aparecen en la pantalla LCD con el fin de calibrar los
captadores. La calibración es necesaria solamente la primera vez que se pone en
marcha la tarjeta.Esc Calibration :
antes de calibrar los ESC’s, retire las hélices o bien deconecte uno de los tres
hilos de alimentación de los motores.
Este menú no inicia la calibración, pero si visualiza las etapas a seguir. Como es
preciso desconectar y conectar la alimentación de la tarjeta manteniendo
pulsados dos botones de la misma, lo más fácil es dejar la batería conectada y
desconectar / conectar el conector del ESC que estará en la salida M1.
1. Apague la tarjeta.
2. Encienda la emisora de radiocontrol y posicione la palanca del gas al máximo.
3. Mantenga pulsados los botones 1 y 4 ([BACK] y [ENTER]). Mantengalos
pulsados hasta finalizar el procedimiento de calibración, de lo contrario este será
interrumpido.
4. Encienda la tarjeta
5. Espere hasta que los ESC’s piten para confirmar el correcto registro del punto
alto del gas. Esto puede demorar algunos segundos dependiendo de los ESC’s.
6. Baje el gas hasta su punto cero.
7. Espere hasta que los ESC’s piten para confirmar el correcto registro del punto
bajo del gas. Esto puede demorar algunos segundos dependiendo de los ESC’s.
8. Suelte los dos botones.
Instrucciones: este párrafo esta en blanco en el documento original.
Mixer Editor :
este modulo permite ajustar el modo en que los valores de los captadores y los
valores de los diferentes canales procedentes de la emisora de radiocontrol, serán
tratados antes de ser enviados a las 8 salidas de los motores. Este modulo le
permite configurar su tarjeta en cualquier multicopter imaginable , hasta un
máximo de 8 motores. Puede así mismo modificar los valores por defecto que se
encuentran en el menú Load Motor Layout.
• Cambio de motor :
seleccione el nombre visualizado en la esquina superior derecha y pulse sobre
[ENTER].
•Throttle :
nivel a tomar en cuenta por el canal Throttle. Generalmente, un motor conectado
a un ESC utiliza un valor del 100% .
• Aileron :
nivel a tomar en cuenta por el canal Roll. Los motores situados a la derecha del
aeromodelo deben recibir valores positivos y los motores situados en la izquierda
valores negativos. El valor depende de la distancia entre el motor y el centro de
gravedad del aeromodelo valores más elevados para un motor más alejado.
• Elevator :
nivel a tomar en cuenta por el canal Pitch. Los motores situados en la parte
delantera del aeromodelo deben recibir valores positivos y los motores
posteriores valores negativos. El valor depende de la distancia entre el motor y el
centro de gravedad del aeromodelo valores más elevados para un motor más
alejado.• Rudder :
nivel a tomar en cuenta por el canal Yaw. Normalmente el valor empleado es de
100. Ajuste un valor positivo para los motores cuyo giro sea en el sentido de las
agujas de un reloj (CW) y negativo para el resto (CCW).
• Offset :
añade un valor constante a la salida de los motores. Deje el valor en 0 para un
ESC y alrededor de 50% para un servo. Además, puede ajustar la posición de un
servo finamente modificando este valor.
• Type :
define si una salida motor está ligada a un ESC o a un servo.
• Output PWM rate :
frecuencia de refresco de los datos para la salida motor. Utilice siempre High si
se trata de un ESC o un servo digital y Low si se trata de un servo analógico.
High corresponde a una frecuencia de refresco de 400Hz y Low a 80Hz.
Sobre una salida ESC, la tarjeta envía los siguientes valores :
• Tarjeta desarmada: 0
• Tarjeta armada y gas a cero: 0
• Tarjeta armada, gas por encima de cero y hasta el máximo: valores entre Minimum Throttle (ver
menú Misc. Settings) y 100%
Sobre una salida de servo, la tarjeta envía los siguientes valores:
• Tarjeta desarmada: valor del offset
• Tarjeta armada, gas a cero: valor del offset
Show Motor Layout : visualize graficamente la disposicion de los motores actualmente cargados. Este
grafico le permite comprobar que han sido correctamente conectados los motores sobre la tarjeta (M1 .
M8) y que los sentidos de rotación son correctos.
Load Motor Layout : carga una de las numerosas disposiciones de los motores contenidos en el
Firmware. Anteriormente para utilizar una misma tarjeta KKV1 sobre un quad X o sobre un tricopter, era
preciso reprogramar la tarjeta con un firmware específico. Por suerte, un único Firmware contiene
varias configuraciones. La disposición de los motores se basa en ajustes de las mezclas, totalmente
modificables para adaptarlas a sus necesidades.
•Debug este párrafo esta en blanco en el documento original.G - Guia de optimización
De un modo general, es mejor conservar las ganancias razonablemente bajas. Valores altos
disminuyen la maniobrabilidad y provocan vibraciones.
Valores iniciales
Ajuste las ganancias y limites como sigue :
Roll/Pitch P-gain: 30 (Para un multicopter de talla pequeña, tipo 25 cm, asigne un valor de 20)
Roll/Pitch P-limit: 100
Roll/Pitch I-gain: 0
Roll/Pitch I-limit: 20
Yaw P-gain: 50
Yaw P-limit: 20
Yaw I-gain: 0
Yaw I-limit: 10
Parámetro P para los ejes Roll / Pitch
Aumente progresivamente el valor de P-gain en saltos de 10 (de 5 o menos para pequeños modelos) y
verifique el comportamiento en vuelo. En particular, observe como en vuelo reacciona a movimientos
rápidos y de baja amplitud sobre los valores Roll y Pitch. A medida que se aumenta el valor de P-gain
observara lo siguiente:
1.
El multicóptero reacciona más rápidamente y parece estar más en fase con el movimiento
de las palancas de mando. Se mueve menos por donde quiere.
2.
El multicóptero oscila. Puede tratarse de algunas oscilaciones o tal vez de una ganancia
muy elevada. Si la oscilación es permanente, la ganancia es muy elevada.
3.
Aterrizar el multicóptero se hace una tarea muy difícil. Realiza efecto yoyo y rebota en
cuanto toca el suelo.
4.
El multicóptero toma altura de un modo incontrolado.
Se tiene un valor P-gain correcto cuando el aeromodelo tiene reacciones francas y
rápidas, no oscila y mantiene una altitud estable.
Parámetros I para los ejes Roll / Pitch
1.
Antes de nada, trime correctamente su multicóptero para obtener un estacionario lo más
correcto posible.
2.
Inicie una traslación hacia adelante y….
3.
Regrese la palanca del Pitch al centro. Fijese bien en el comportamiento del multicóptero.
Si se recupera espontáneamente y queda plano, aumente el valor de I-gain. Si conserva
correctamente la altitud, entonces su valor es el correcto. En general, el valor de I-gain
debe estar entre el 50% y el 100% del P-gain.Parámetros P para el eje Yaw
Aumente el P-gain de 10 en 10 unidades ( 5 o menos para pequeños modelos) y compruebe el
comportamiento en vuelo. Empiece con un estacionario y mueva el Yaw hasta que el aeromodelo
realice un cuarto de vuelta. Centre la palanca y observe atentamente el multicopter.
1.
inicia y finaliza los movimientos de una manera más limpia y rápida.
2.
supera de menos en menos el punto donde usted quería que se detuviera.
3.
toma o pierde altura.
La ganancia de P-gain está bien ajustada cuando las reacciones son rápidas, que los movimientos
finalizan limpiamente y que mantiene una altitud estable durante la rotación. Un buen valor para
empezar los ajustes es de 100% del P-gain de los ejes Roll y Pitch.
Parámetros I para el eje Yaw
Aumente el valor de 10 en 10 unidades ( 5 o menos para pequeños modelos) y proceda a realizar el
mismo test que en el párrafo anterior. La ganancia de I-gain es correcta cuando la detención del
aeromodelo es la más cercana y limpia al punto de detención deseado. Un buen valor es el que se
encuentra cercano al 100% del P-gain.
Si su multicopter es un modelo pequeño y no existe riesgo de daños personales, puede forzar el
movimiento manualmente haciéndolo girar sobre sí mismo. Si no retoma su orientación inicial, aumente
el valor de I-gain.
***********************************************************************************************
Documento extraído del manual en Francés HK KK2.0 sito en la web de Hobby King
Fecha traducción 20/08/2012 ----- zagi.palma@gmail.com -------- Aniretak
***********************************************************************************************También puede leer