Diseño de mecanismo de suspensión trasera flotante para motocicletas de competición
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

Diseño de mecanismo de suspensión trasera flotante para motocicletas de competición PROYECTO PARA OPTAR AL TÍTULO DE INGENIERO INDUSTRIAL SUPERIOR, ESPECIALIDAD EN MECÁNICA DE MÁQUINAS Daniel Holloway Campos TUTORADO POR DANIEL GARCÍA VALLEJO | ESCUELA TÉCNICA SUPERIOR DE INGENIRÍA, UNIVERSIDAD DE SEVILLA , 11/11/2014

1 INTRODUCCIÓN ..................................................................................................................... 3 2 REVISIÓN HISTÓRICA/ESTADO DEL ARTE .............................................................................. 4 2.1 Evolución histórica ........................................................................................................ 4 2.2 Sistemas de bieletas actuales...................................................................................... 10 2.3 Otros sistemas de suspensión innovadores ................................................................ 11 3 OBJETIVOS Y DESCRIPCIÓN DEL DESARROLLO DEL PROYECTO ........................................... 12 3.1 Situación de partida y objetivos .................................................................................. 12 3.2 Limitaciones ................................................................................................................ 13 3.3 Desarrollo general ....................................................................................................... 14 4 DESARROLLO CONCEPTUAL ................................................................................................ 21 4.1 Modelo paramétrico ................................................................................................... 22 4.2 Subfase de simulación ................................................................................................. 24 4.2.1 Simulación cinemática......................................................................................... 24 4.2.2 Simulación de aceleración ................................................................................... 29 4.2.3 Cálculo de propiedades ....................................................................................... 38 4.2.3.1 Progresividad ................................................................................................... 38 4.2.3.2 Squat................................................................................................................ 39 4.2.3.3 Punto de equilibrio estático ............................................................................ 45 4.2.3.4 Reacciones ....................................................................................................... 48 4.3 Subfase de optimización ............................................................................................. 50 4.3.1 Variables del problema de optimización ............................................................. 52 4.3.2 Funciones objetivo .............................................................................................. 52 4.3.3 Lower y upper bounds......................................................................................... 53 4.3.4 Restricciones no lineales ..................................................................................... 53 4.3.5 Características y uso de la función fmincon de Matlab....................................... 55 4.3.6 Evaluación de resultados..................................................................................... 57 4.3.7 Resultados obtenidos .......................................................................................... 58 4.3.8 Particle Swarm Optimization............................................................................... 63 5 DESARROLLO MECÁNICO .................................................................................................... 64 5.1 Hipótesis de carga ....................................................................................................... 67 5.1.1 Reacciones de la suspensión ............................................................................... 67 5.1.2 Paso por curva ..................................................................................................... 68 5.1.2.1 Paso por curva estacionario (con CdG del conjunto motocicleta + piloto contenido en el plano medio de la misma) ..................................................................... 69 5.1.2.2 Paso por curva estacionario (con CdG del conjunto motocicleta + piloto fuera del plano medio de la misma) ......................................................................................... 69 1

5.1.2.3 Paso por curva transitorio (proceso de “tumbado” y “destumbado”) ........... 71 5.1.3 Aceleración .......................................................................................................... 71 5.1.3.1 Fuerza de avance (S)........................................................................................ 72 5.1.3.2 Tensión de la cadena ( ):.............................................................................. 72 5.2 Diseño de componentes.............................................................................................. 72 5.2.1 Criterios de diseño .............................................................................................. 72 5.2.2 Materiales ........................................................................................................... 73 5.2.3 Componentes ...................................................................................................... 74 5.2.3.1 Ejes y casquillos ............................................................................................... 74 5.2.3.1.1 Eje bieleta inferior-chasis .......................................................................... 75 5.2.3.1.2 Eje bieleta inferior-basculante .................................................................. 77 5.2.3.1.3 Eje bieleta superior-chasis ........................................................................ 79 5.2.3.1.4 Eje bieleta superior-basculante................................................................. 81 5.2.3.2 Bieleta superior (barra 2) ................................................................................ 83 5.2.3.3 Bieleta inferior (barra 4) .................................................................................. 89 5.2.3.4 Placas traseras de chasis ................................................................................. 90 5.2.3.5 Basculante temporal (barra 3) y conjunto trasero .......................................... 92 6 MODIFICACIÓN DE LOS COMPONENTES DE SERIE.............................................................. 93 7 FABRICACIÓN DE LAS PIEZAS............................................................................................... 93 8 RESUMEN Y CONCLUSIONES ............................................................................................... 96 9 BIBLIOGRAFÍA ...................................................................................................................... 98 ANEXO I: PLANOS 2

1 INTRODUCCIÓN El desarrollo del presente proyecto se encuentra enmarcado en la participación del equipo US- Racing Engineering en la competición bienal “Motostudent” en su edición 2013/14, promovida por la organización MEF. El objetivo de “Motostudent” es el diseño de una motocicleta de competición de 250cc (similar a la categoría de Moto3 del FIM) por parte de las universidades participantes. Estas motocicletas se dan cita posteriormente en diversas pruebas en la competición (que se desarrolla a lo largo de 4 días en el circuito de Motorland de Aragón), en las que son puntuadas y tras las cuales se dictaminan los ganadores en cada una de ellas. Con el fin de participar en la edición 2013/14 de la competición, el equipo de la Universidad de Sevilla, US-Racing Engineering, ha desarrollado el prototipo bautizado con el nombre de “UPOne” o “Unique Prototype One”. El desarrollo de este proyecto se ha hecho de forma íntegra con la colaboración de la Universidad de Sevilla, y más concretamente de las facultades de ingeniería, la Escuela Superior de Ingeniería de Sevilla y la Escuela Politécnica Superior de Sevilla. No obstante, un elevado porcentaje de la financiación (ya sea a nivel económico, como a nivel técnico) ha sido realizado por parte del propio equipo mediante la búsqueda de patrocinadores privados (empresas o particulares). Existen 2 aspectos de la competición “Motostudent” que han resultado de gran influencia en el desarrollo del presente proyecto y que se comentan a continuación: - Con el objetivo de mantener un nivel de desarrollo tecnológico similar entre los participantes, la organización proporciona unos elementos de obligado uso en el prototipo a diseñar, como pueden ser el motor, la horquilla, el amortiguador trasero, las ruedas y los neumáticos y los frenos. El hecho de que existan una serie de componentes de necesaria utilización y de difícil modificación (siguiendo el reglamento proporcionado por el MEF) influye de manera muy notable en el diseño del sistema de suspensión, lo cual se hace muy evidente si se atiende a la mencionada lista de componentes y al hecho de que estén incluidos tanto la horquilla delantera como el amortiguador trasero. - Por otro lado, una de las pruebas o aspectos que se valoran en la competición “Motostudent” es la innovación, habiéndose incluido incluso un premio propio dedicado exclusivamente a este apartado. Este hecho ha sido el de mayor influencia en el desarrollo de este proyecto y el que ha motivado la exploración y el uso de métodos poco convencionales en el diseño de este sistema de suspensión. Descripción del proyecto: Habiéndose establecido las bases sobre las que se desarrolla el presente proyecto, se pasa a continuación a la descripción algo más pormenorizada del mismo. El trabajo a realizar por parte del equipo US-Racing Engineering se ha dividido desde el primer momento en diferentes áreas o subequipos de trabajo, cada uno de los cuales se encarga de un zona, componente o estructura básica más o menos diferenciada de la motocicleta: chasis, basculante, suspensión, subchasis, escape, admisión, electrónica, aerodinámica y elementos auxiliares. 3

Este documento muestra el desarrollo de principio a fin del proyecto de diseño y materialización del sistema de suspensión de la motocicleta “UPOne”. El objetivo general del proyecto ha sido el desarrollo de un sistema de suspensión trasera innovador con el que poder competir por el premio anteriormente mencionado a la innovación, y por otro lado, realizar las modificaciones necesarias pero factibles (dado el reglamento) sobre el sistema de suspensión delantero, es decir, la horquilla proporcionada por la organización. Se ha decidido esta forma de desarrollar el proyecto por varios motivos: en primer lugar, la horquilla proporcionada por la organización es modificable dentro de unos límites, y para innovar en este campo sería necesaria una amplia modificación de la inmensa mayoría de los componentes originales de la misma, lo cual, dados los limitados recursos disponibles (tiempo y dinero) resulta poco beneficioso. Por otro lado, existía un concepto/idea desde la edición anterior de cómo desarrollar un sistema de suspensión altamente innovador aplicado al tren trasero, pero cuyo desarrollo no había sido posible hasta la fecha dada la falta de conocimientos y de recursos de cálculo disponibles, entre otros. 2 REVISIÓN HISTÓRICA/ESTADO DEL ARTE 2.1 Evolución histórica A continuación se va a realizar un breve recorrido histórico y análisis de cómo han ido evolucionando los diferentes sistemas de suspensión traseros en motocicletas a lo largo de la historia según iban cambiando las necesidades, se desarrollaban nuevas técnicas de cálculo y se iban abriendo paso nuevas oportunidades tecnológicas factibles de ser implementadas en estos sistemas. El diseño de los sistemas de suspensión ha condicionado enormemente el desarrollo del resto de la motocicleta y en particular el chasis a lo largo de la historia. Los primeros chasis que se desarrollaron eran de tipo tubular y muy similares al cuadro de una bicicleta, empleando lo que se llama el “diseño tipo diamante” o empleando dos triángulos principales. Esto se debía a que, efectivamente, las primeras motocicletas no eran más que bicicletas con un pequeño motor que asistía al pedaleo y que iba montado en el triángulo anterior y anclado a varios puntos. Estos chasis carecían de suspensión trasera, por lo que se trataba de una estructura rígida que unía desde la pipa de dirección hasta las punteras traseras a las que iba anclado el eje de la rueda trasera. Figura 2.1 Chasis tipo diamante y doble cuna primitivos 4
Cuando empezaron a aparecer las primeras motocicletas dotadas de suspensión trasera, a lo largo de los años 40 aproximadamente, los fabricantes implementaron a menudo sistemas excesivamente sencillos que aumentaban el confort en marcha a costa de aumentar enormemente la inestabilidad y la flexibilidad del conjunto (es el caso de la famosamente apodada “garden gate” de Norton). Estos sistemas se basaban en el uso de “kits de adaptación” que permitían dotar de suspensión a un modelo con chasis rígido. Sin embargo, debido al uso de amortiguadores independientes a cada lado de la rueda y unidos al eje de ésta de forma directa, la rigidez a torsión del sistema era ínfimo y provocaba a menudo que la rueda trasera se saliera del plano medio de la motocicleta. Figura 2.2 Norton “garden gate” En 1950, este mismo fabricante lanzó al mercado su modelo “Featherbed” que como su propio nombre indica, conseguía reducir las vibraciones y las incomodidades de un modelo rígido pero sin sacrificar las propiedades dinámicas y de estabilidad del vehículo. Incluso a día de hoy se siguen empleando esquemas básicos basados en esta primera configuración diseñada por los hermanos McCandless. 5

Figura 2.3 Chasis de la Norton “featherbed” En estos primeros años del desarrollo de las suspensiones traseras, también entraron en el juego numerosos fabricantes que comenzaban a desarrollar ya modelos con basculantes triangulados (para aumentar la rigidez) como es el caso de Vincent-HRD o sin triangular y empleando tubos de sección variable como el caso de Velocette. Figura 2.4 Basculante de sección variable de una Velocette 6

Todos estos sistemas basaban en mayor o menor medida su rigidez torsional en el uso de una pareja de amortiguadores, uno a cada lado de la rueda trasera, que unían el basculante con el chasis (o la prolongación del mismo, subchasis). Algunos fabricantes como Girling se dedicaron a vender parejas de amortiguadores especialmente seleccionados (con características similares) con el fin de reducir el mayor de los problemas que sufrían estas motocicletas: el comportamiento dinámico asimétrico debido al mayor empleo de uno de los dos amortiguadores en curvas a izquierda o derecha. En los años siguientes, la tendencia general fue la de emplear basculantes triangulados con el fin de que fueran los suficientemente rígidos por sí solos como para permitir el uso de un único amortiguador centrado y alojado más cerca del centro de la motocicleta. Este fue el caso de la BSA de Gran Premio de 250cc construida por Doug Hele en 1952. Figura 2.5 Conjunto chasis y suspensiones de la BSA de Gran Premio Estando ya triangulados los basculantes de forma adecuada, los fabricantes comenzaron a prestar mayor atención a ciertos detalles que previamente parecían tener menor importancia como la altura del CdG. En un intento por bajarlo al mínimo, se comenzaron a triangular los basculantes por debajo de la línea que une el eje de pivote con el chasis y el eje de la rueda. Estos sistemas propiciaban la colocación del amortiguador en la zona más baja de la motocicleta, incluso debajo del propio motor (como era el caso de Moto Guzzi, modelo que partió de una configuración más tradicional de 2 amortiguadores traseros laterales y que posteriormente sería adaptada). 7

Figura 2.6 Tren trasero de una Suzuki RG 500 con basculante similar a la Moto Guzzi Finalmente sería Kawasaki la que, a mediados de los años 70, comenzase a emplear en sus motocicletas 250 GP sistemas de bieletas para transmitir el movimiento del basculante al chasis, y los que han dado lugar a su uso generalizado hoy en día en MotoGP, Moto2, Moto3 así como en la inmensa mayoría de las motos deportivas de calle (y sus derivaciones en motos de tipo Superbike). Cabe destacar no obstante, que estos sistemas fueron empleados anteriormente en motocross, a principios de los años 70, y ese sigue siendo el caso en la actualidad. El motivo fundamental fue el rápido crecimiento del recorrido trasero que incorporaban estas motocicletas, pasando en cuestión de pocos años de 100mm a 300mm. Esto provocaba problemas para incorporar los amortiguadores en el extremo del basculante, por lo que se fueron moviendo hacia el interior de las motocicletas (al igual que se ha explicado con las de competición) y se comenzaron a usar bieletas para regular con mayor facilidad el movimiento de la suspensión en ese enorme recorrido disponible. Los sistemas de suspensión que emplean bieletas son muy variados. El primero empleado por Kawasaki (como ya se ha mencionado) se basaba en el uso de un balancín, conectado mediante 2 tirantes (que trabajaban a compresión) al basculante, que transmitía el movimiento al amortiguador (colocado detrás de la caja de cambios). En modelos posteriores, este diseño cambiaría anclando el amortiguador al propio basculante en lugar del chasis (muy similar al sistema Pro-Link empleado por Honda en la actualidad). 8

Figura 2.7 Sistemas de bieletas de la Kawasaki de GP (izquierda) y de una motocicleta de competición actual (derecha) El principal motivo del uso de sistemas de suspensión con bieletas es lograr un sistema de dureza percibida variable o progresivo, es decir, un sistema de suspensión en el que la fuerza a aplicar sobre la rueda trasera para conseguir un determinado desplazamiento de la misma no fuera solo proporcional a dicho desplazamiento, sino más que proporcional. Esto da lugar a un tramo inicial de suspensión más “blando” y adecuado para la atenuación de pequeñas irregularidades, pero que se va endureciendo de forma más que proporcional hacia el final del recorrido (perfecto para la absorción de baches de mayor tamaño o impactos de mayor fuerza). Esta característica se había conseguido hasta la fecha mediante el uso de muelles en serie de diferente dureza o incluso muelles de paso variable. Estas alternativas siguen empleándose en la actualidad con mucha frecuencia cuando no se desea implementar un sistema mecánico de mayor complejidad por cuestiones de dificultad, económicas, etc. La otra gran ventaja de estos sistemas es la flexibilidad que ofrecen a la hora de disponer el amortiguador en una determinada posición. Uno de los ejemplos más característicos es el de la Yamaha OW61 que montaba el amortiguador de forma transversal a la motocicleta y empujados por sus dos extremos por dos balancines. Figura 2.8 Suspensión trasera de la Yamaha OW61 9
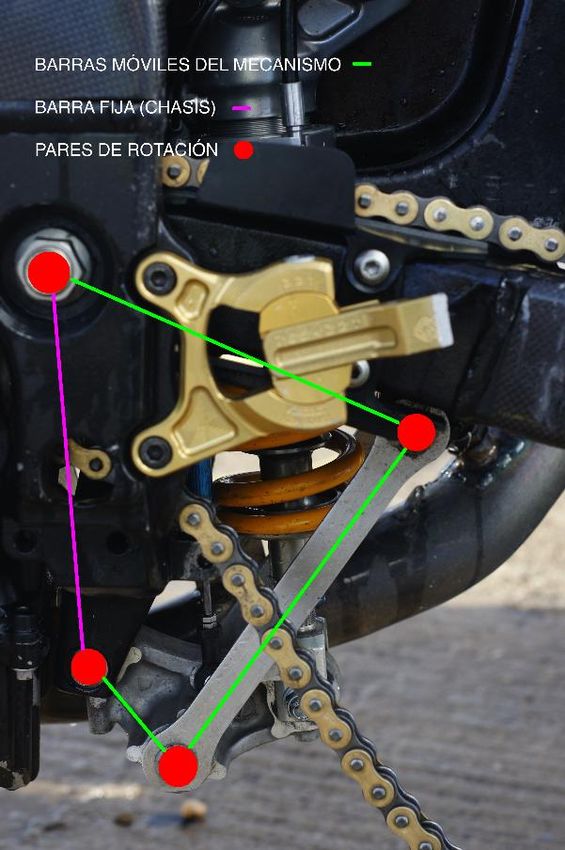
2.2 Sistemas de bieletas actuales Todos los sistemas de bieletas que incorporar los fabricantes actuales tienen como objetivo común el de variar, por métodos geométricos, la progresividad del sistema de suspensión. Es por ello que, con el fin de poder diferenciarse entre sí, las distintas firmas han intentado hacer uso tanto de estrategias de marketing como de la incorporación de pequeñas variaciones en sus sistemas que los hagan reconocibles, distintos y finalmente mejores que los demás. Al final, la inmensa mayoría de estas variaciones dan lugar a sistemas aun así muy similares entre sí, por lo que la ventaja de unos sobre otros es bastante cuestionable. No obstante, se puede atender a una serie de prestaciones secundarias que si pueden hacer volcar la balanza hacia un lado o hacia otro, como son el peso del sistema, la resistencia (rigidez) del mismo, la compacidad, la sencillez, etc. Figura 2.9 Sistema actual de bieletas (izquierda) con el mecanismo de cuatro barras señalado con mayor claridad (derecha) La inmensa mayoría de los sistemas de bieletas se basan fundamentalmente en un mecanismo de 4 barras, en el que la barra fija es el chasis, una de las barras acopladas a éste (de “entrada” o de “salida”) es el basculante y el amortiguador va unido a dos de las barras del mecanismo (ya sean ambas móviles o una de ellas fija y la otra móvil). Éste es el caso de la mayoría de los sistemas empleados en competición en la actualidad, puesto que son fácilmente modificables y regulables, lo que los hace ideales para este ámbito. 10
Figura 2.10 Mecanismos de suspensión basados en bieletas en tres motocicletas deportivas de calle actuales: Honda (izquierda), Kawasaki (centro) y Suzuki (derecha) 2.3 Otros sistemas de suspensión innovadores A lo largo de la historia de han desarrollado diferentes sistemas más o menos innovadores con respecto a los establecidos en la época que buscaban suplir las deficiencias de los sistemas que implementaban la inmensa mayoría de los fabricantes. Algunos de estos sistemas se consideraron auténticas proezas pues demostraron cumplir en mayor o menor medida con el cometido para el que habían sido diseñados y otros acabaron cayendo en el olvido. A continuación se repasan algunos de los más notables: Tul-aris: esta motocicleta de competición diseñada por el Dr. Robin Tuluie tiene la particularidad de que, en un intento por simplificar al máximo el mecanismo de 4 barras de la suspensión trasera, elimina uno de los pares de rotación de una de las bieletas que van al chasis. De esta forma, el funcionamiento del mecanismo se basa en la flexión controlada de esta bieleta o barra que va unida de forma rígida al chasis. Con ello pueden abaratarse costes en caso de montarse en una motocicleta de serie y pueden minimizarse holguras y fricciones tan indeseables en un sistema de suspensión. Figura 2.11 Sistema de suspensión de la Tul-aris Bimota: la firma italiana de motocicletas desarrolló un modelo con una suspensión bastante particular: el basculante rota con respecto al chasis en un eje concéntrico al eje de salida del motor. De esta forma se consigue que la holgura de la cadena sea totalmente inexistente y que su tensión permanezca constate a lo largo del recorrido de la suspensión. Para motos con poco recorrido, esto puede parecer una ventaja pequeña, pero que va aumentando conforme lo hace el recorrido disponible. Se hará alusión a este problema de nuevo más tarde, y se seguirá tratando a lo largo del documento. Un sistema similar fue implementado por Honda en su modelo NR 500 con mayor o menor éxito. 11
Figura 2.12 Bimota con basculante concéntrico al eje de salida del motor (izquierda) y sistema de suspensión de la Honda NR 500 (derecha) BMW: un gran número de fabricantes han intentado jugar con el efecto del “squat” (que se describirá con más detalle más adelante) especialmente en motocicletas de transmisión por cardan. Destaca el caso de BMW con su sistema “Paralever” monobrazo: El posicionamiento de los puntos de articulación de la suspensión (que ya no se basa en bieletas tradicionales como tal) permite minimizar el efecto del “squat” implementando un efecto “anti-squat” en la geometría de la motocicleta. Otros fabricantes como MV o incluso Moto Guzzi han empleado disposiciones similares y con el mismo objetivo. Estos casos son dignos de ser estudiados con detenimiento, dado que son los más similares al sistema desarrollado finalmente en este documento. Podría decirse que se asienta en las mismas bases que estos sistemas y tienen objetivos similares en su diseño, pero que se han enfocado desde otro punto de vista bastante diferente (se han añadido más objetivos simultáneos, la transmisión es por cadena, no es un sistema monobrazo, entre otras diferencias). Figura 2.13 Tren trasero tipo “Paralever” de BMW (izquierda) y sistema empleado por Moto Guzzi (derecha) 3 OBJETIVOS Y DESCRIPCIÓN DEL DESARROLLO DEL PROYECTO 3.1 Situación de partida y objetivos El objetivo del sistema de amortiguación a grandes rasgos en cualquier vehículo es el de absorber las irregularidades del terreno sobre el que circula, estabilizando el vehículo, mejorando el confort en marcha para el/los ocupantes y manteniendo el contacto entre 12
las ruedas y el firme. Así mismo, se encarga de minimizar (amortiguar) las posibles vibraciones inducidas por las irregularidades del firme sobre el vehículo. En un vehículo de competición, como es el caso que nos ocupa, estos últimos puntos son primordiales, pues la suspensión permite maximizar el tiempo de contacto y de adherencia entre las ruedas y la pista, lo que permite una circulación más rápida y una reducción de los tiempos por vuelta. Además, y debido a que a través de la suspensión pasan todas las fuerzas de contacto de la motocicleta con la pista, un sistema bien reglado le transmite al piloto una mayor confianza lo que permite disminuir aún más los tiempos por vuelta. Con estos objetivos en mente, se pretende desarrollar un sistema de suspensión que los cumpla minimizando de forma simultánea las desventajas que presenta la implementación de un sistema de suspensión convencional: la elongación de la cadena y la pérdida de aceleración y tracción óptima por transferencia de pesos o “squat”. Si bien el primero de estos problemas no es excesivo, poder mantener una longitud de cadena constante puede resultar beneficioso en términos de minimizar las vibraciones ocasionadas por el movimiento del ramal destensado de la misma. En cuanto al segundo de los problemas, es muy evidente que poder manejar como se desee el movimiento de la rueda trasera ante aceleración puede resultar muy beneficioso: todas las fuerzas involucradas en el proceso de aceleración de una motocicleta y las relaciones entre las mismas dan lugar a un comportamiento de la suspensión trasera de la motocicleta que, en función del diseño de la misma, puede resultar más o menos adecuado para la competición (maximizando la tracción). Cabe citar que, como el principal objetivo del diseño del sistema de suspensión ha sido la innovación, se ha centrado el desarrollo de la misma en maximizar las ventajas anteriormente descritas (sin perjudicar otras básicas como son la dureza percibida del sistema, la progresividad, el equilibrio estático o el recorrido de la misma) dejando parcialmente aparcados otros análisis como pueden ser los de tipo frecuencial (con el objetivo de minimizar la transmisión de vibraciones). Se ha decidido así, entre otros motivos, por la relativa facilidad de abordar este último análisis a posteriori y la posibilidad de reglar la suspensión con facilidad para optimizar esta propiedad modificando únicamente las características intrínsecas del amortiguador (si la organización lo permitiese). 3.2 Limitaciones A la hora de diseñar el sistema de suspensión, se han de tener en cuenta una serie de limitaciones de diversa índole: - Limitaciones del conjunto muelle-amortiguador: el conjunto muelle-amortiguador suministrado por la organización impone una serie de restricciones en el diseño del sistema de suspensión del tren trasero de la motocicleta. El uso de este componente es obligatorio y las posibilidades de modificación del mismo están muy limitadas. Como restricciones básicas e inamovibles se toman la distancia entre ejes del mismo en estado de reposo (ausencia de carga) y el recorrido máximo que ofrece el componente. Como se ha citado previamente, también las características de amortiguamiento del mismo (tanto en extensión como en 13
compresión) son básicas e inamovibles (por definición del reglamento de la competición). Existe otra característica básica del componente que es la dureza del muelle proporcionado: se intentará adaptar el diseño del sistema de suspensión al mismo, pero que en caso de necesitar una modificación a posteriori por ser excesivamente restrictivo, se tendrá en cuenta la posibilidad de sustituirlo por otro de una dureza diferente. - Limitaciones geométricas: existen, por otro lado, limitaciones de tipo “geométrico” o de espacio que afectan de manera muy severa al diseño del sistema de suspensión: la posición de muchos de los componentes básicos de la motocicleta limitan el espacio útil aprovechable por el sistema. Algunos ejemplos de estas limitaciones son las impuestas por la posición del motor, puntos de articulación factibles al chasis, distancia entre ejes de la motocicleta, distancia entre ejes de articulación, posición del piñón del motor, posición del piloto, posición de las cogidas del subchasis monocasco al chasis, entre otras. Dada la configuración final adoptada, que requiere del cumplimiento de propiedades bastante más restrictivas que un sistema de suspensión convencional (por motivos que se explicarán a posteriori), estas limitaciones espaciales juegan un papel de vital importancia en el desarrollo del sistema de suspensión. 3.3 Desarrollo general Fase I: Esquema básico: El punto de partida del diseño del sistema de suspensión es el esquema básico o layout del mismo. Dados los objetivos propuestos, y siempre con la innovación como bandera del proyecto, se comienza el estudio de diversos sistemas y se analiza la capacidad de cada uno de ellos de satisfacer los requerimientos impuestos. Este proceso no es más que una continuación de un estudio que se llevó a cabo en la 2ª edición de Motostudent y en la que, por la inexperiencia y por la falta de tiempo, se adoptó finalmente un sistema tradicional de suspensión basado en bieletas (como los vistos anteriormente al final de la revisión histórica) que comunican el movimiento del basculante al amortiguador. Sin embargo, y como ya se anunció brevemente en el mencionado proyecto de la edición 2012/2013, existen unos sistemas muy poco explorados en el mundo de la motocicleta y que a priori parecen cumplir muy adecuadamente los objetivos marcados para este proyecto: los sistemas de suspensión muy frecuentemente empleados en el mundo del ciclismo de montaña. A diferencia de un sistema de suspensión tradicional, en el que el basculante está constituido como un monopivote articulado de forma directa al chasis y con respecto al cual bascula en un único punto, estos sistemas que se mencionan emplean como basculante la barra acopladora de un mecanismo de 4 barras y es por ello que tradicionalmente se conocen con el nombre de basculantes flotantes. 14
Figura 3.1 Sistemas de suspensión de tipo multilever o basado en bieletas (izquierda) y de anclaje directo (izquierda) Figura 3.2 Cuadros de bicicleta de montaña con sistema de basculante flotante: Iron Horse Sunday con sistema DW Link (izquierda) y Marin Mount Vision con sistema Quad Link (derecha) El basculante en esta configuración no se articula de manera directa al chasis, sino a través de 2 bieletas (barras tradicionalmente de entrada y salida del mecanismo de 4 barras, aunque el uso de los términos “barra de entrada y barra de salida” sería incorrecto en esta aplicación). Con este sistema se gana una enorme flexibilidad en dos sentidos: - En primer lugar, al estar tratando con la barra acopladora de un mecanismo de 4 barras, a través de un proceso de síntesis de generación de trayectoria, se puede conseguir que un punto concreto del basculante siga una determinada trayectoria (con una determinada tolerancia). Aprovechando esto a nuestro favor, se puede conseguir que el eje de la rueda trasera siga una trayectoria aproximadamente circular (arco de circunferencia) entorno al eje de salida del motor. De esta manera, se minimiza la elongación de la cadena, y se optimiza uno de los objetivos propuestos inicialmente. - En segundo lugar, con una configuración de un mecanismo de 4 barras se desacoplan la trayectoria seguida por el eje de la rueda trasera del centro instantáneo de rotación: en un basculante monopivote tradicional, el eje entorno al cual describe una trayectoria circular el eje de la rueda trasera y el eje en el que pivota el propio basculante coinciden (es el eje de rotación del mismo con respecto al chasis); sin embargo, y como se ha mencionado, con un mecanismo de 4 barras, estos dos puntos pueden situarse en lugares diferentes y además pueden variar a lo largo del recorrido de la suspensión de forma dinámica. El punto entorno al cual el eje trasero describe una trayectoria circunferencial ya se ha posicionado en el eje de salida del motor, de forma que queda por posicionar el CIR (o vpp “virtual pivot point”) del basculante en 15
una posición (o sucesión de posiciones) que nos favorezca. Para entender la importancia de la localización del CIR del basculante, es imprescindible mencionar que el conjunto de fuerzas que actúan sobre el tren trasero de una motocicleta (fuerza normal, fuerza normal variable por transferencia de pesos, tensión de la cadena y fuerza de avance) y la relación entre ellas (fuerza y momento resultantes) dependen en enorme medida de la posición del CIR del basculante con respecto al chasis. En función de cómo sean estas resultantes (magnitud, dirección y punto de aplicación) se consigue un comportamiento u otro de la motocicleta. Con este análisis se pretende conseguir optimizar el comportamiento dinámico de la motocicleta “in-plane” o ante las fuerzas que actúan en el propio plano de la motocicleta, es decir, ante un proceso de aceleración. Para optimizar la aceleración de la motocicleta es necesario optimizar la tracción de la misma. El fenómeno conocido como “squat” rige de forma muy severa este aspecto del comportamiento dinámico de una motocicleta. El “squat” se define como el hundimiento o uso de recorrido de la suspensión trasera como una consecuencia de la trasferencia de pesos del tren delantero al trasero que se da en un proceso de aceleración de un vehículo. De manera general, el “squat” es un fenómeno indeseable, y es por ello que se “combate” con el adecuado uso de las restantes fuerzas que actúan sobre el tren trasero de la motocicleta y con la geometría de la suspensión (fundamentalmente la posición del ya mencionado CIR del basculante). No obstante, cabe notar que un uso excesivo de “anti-squat” puede dar lugar a un comportamiento también poco deseable (levantamiento del tren trasero de la motocicleta). Después de realizar un exhaustivo análisis, se llega a la conclusión de que lo más óptimo es conseguir un valor nulo de “squat”, entendiéndose por esto la ausencia de movimiento de la suspensión trasera ante un proceso de aceleración. El tren delantero si sufre un levantamiento, pero no afecta a la tracción de la motocicleta. Con este objetivo en mente, se procede a optimizar la localización del CIR del basculante con respecto al chasis de forma que se consiga un valor lo más cercano a cero de “squat”. Finalmente, la posición del amortiguador se localiza entre una de las bieletas y el chasis: existen infinidad de opciones en este sentido, pero se optó por esta a priori por la accesibilidad y por el mayor espacio disponible de esta forma. Fase II: Desarrollo conceptual y matemático: Con el esquema básico ya determinado (un mecanismo 4 barras con el basculante actuando como barra acopladora), se procede al desarrollo matemático o conceptual del mecanismo de suspensión. Este proceso de subdivide en dos apartados: Modelos de simulación: se desarrollan modelos matemáticos del mecanismo de suspensión parametrizados: se prepara una simulación cinemática del mecanismo, además de una simulación de aceleración del vehículo completo. Con la simulación cinemática del mecanismo se puede “barrer” un tramo del movimiento del mecanismo con el fin de extraer todas las propiedades que sean necesarias a posteriori para el proceso de optimización. De esta simulación cinemática se extraen, asimismo, las fuerzas de reacción que se dan en todos los puntos de articulación de la suspensión (entre bieletas y basculante, entre bieletas y chasis, y las transmitidas entre el amortiguador y sus elementos adyacentes. Finalmente, se desarrolla una simulación de aceleración de la motocicleta al completo como sólido rígido. El objetivo de esta simulación es determinar, en función de algunos parámetros básicos de la motocicleta (estimación de la localización del CG de la misma, distancia entre ejes, etc.), cómo se desarrolla la transferencia de peso 16
(evaluación del valor de la normal a lo largo de la aceleración), la fuerza motriz y la tensión de la cadena conforme acelera la motocicleta. Finalmente, se evalúan, usando las simulaciones anteriores, todas las propiedades de la suspensión que se piensan optimizar en el apartado posterior: progresividad, punto de equilibrio estático y “squat” (calculado en función de la posición del CIR que, a su vez, queda en función de la geometría del mecanismo). Figura 3.3 Resultados de la simulación de aceleración (izquierda) y cinemática (derecha) que se ven en mucha mayor profundidad en capítulos posteriores Proceso de optimización: una vez definidas matemáticamente todas las propiedades a optimizar, se desarrolla un programa o código de optimización que funciona del siguiente modo: el programa recibe todas las propiedades a optimizar parametrizadas y evaluables en función de la geometría del mecanismo de suspensión (longitudes de barras, ángulos, posiciones fijas de pivote, etc.). Con estas propiedades se formula la función objetivo del código. El problema necesita también de una serie de restricciones: estas son muchas y de diversa índole: recorrido máximo y mínimo de la suspensión, zona inicial del eje de la rueda trasera, trayectoria circular entorno al eje de salida del motor, longitud del amortiguador en posición extendida y en posición comprimida, longitudes máximas y mínimas de cada barra, ángulos máximos y mínimos característicos de cada barra, y muchas otras. Estas restricciones, tal y como puede sospecharse, se definen como inecuaciones, y, además, se les añaden una serie de tolerancias con el fin de relajarlas mínimamente y facilitar el cumplimiento simultáneo de las mismas. Aportando una solución básica factible para el problema en la que se cumplen todas las restricciones, el programa comienza a iterar mejorando, mediante el uso del algoritmo de optimización que se especifique, la función objetivo y consiguiendo, como resultado, la mejora de las propiedades de la suspensión. Se prueban múltiples combinaciones de función objetivo y alternativas: - Resolución de cada propiedad de forma independiente (para luego proporcionar el óptimo de este problema como solución inicial factible para la optimización de la siguiente propiedad rigidizando las restricciones en cada paso si fuera necesario para no empeorar la primera propiedad ya optimizada). - Resolución conjunta de todas las propiedades mediante la construcción de una función objetivo basada en la suma de las desviaciones de las propiedades a optimizar ponderadas con un peso en función de la importancia relativa de dicha propiedad con respecto a las demás (y como función de escalado también). 17
- Resolución adimensional del problema con el objetivo de aumentar la velocidad del proceso y de las iteraciones (se adimensionalizan tanto la función objetivo como las restricciones). Figura 3.4 Ejemplos de superficies de squat antes (izquierda) y después del proceso de optimización (derecha) Cabe destacar que el mecanismo de suspensión resultante del proceso de optimización no es único, si no que en función de mecanismo inicial proporcionado para comenzar el proceso iterativo y del mayor o menor grado de rigidez de las restricciones impuestas, se obtiene un mecanismo óptimo u otro (cada uno de los cuales puede optimizar más o menos las propiedades). Esto se debe a que el programa de optimización localiza mínimos locales de la función objetivo (dentro siempre del cumplimiento de las restricciones). Es por ello que se han probado múltiples combinaciones de mecanismos iniciales y procedimientos que desembocan en diferentes mecanismos posibles. Cada uno de éstos queda reportado (junto con sus propiedades) y se analizan a posteriori en conjunto, en términos de factibilidad de fabricación, minimización de fuerzas de reacción, cercanía a otros elementos de la motocicleta, etc. Existen muchos factores que afectan a la propiedad del “squat” en la motocicleta, un número de los cuales son difíciles de conocer a priori, como la altura del CDG de la motocicleta, tamaño de plato y piñón, etc. Sin embargo, estas propiedades afectan de forma muy similar al resultado final del “squat”, por lo que se han diseñado dos mecanismos 4 barras factibles de ser implementados con el mínimo número de cambios posibles: un basculante con 2 posiciones posibles para la rueda trasera y dos pares de barras de entrada y salida del mecanismo. De este modo, cambiando estos tres reglajes, se consigue adaptar la suspensión trasera a las condiciones finales de uso de la motocicleta y a sus propiedades intrínsecas (cada uno de los mecanismos está optimizado para una determinada altura del CDG/uso de una combinación de plato-piñón diferente). Por último, mencionar que se comenzó a investigar y a desarrollar un programa de optimización basado en un algoritmo de tipo “particle swarm optimization” capaz de conseguir localizar el mínimo global de la función objetivo, pero por falta de tiempo, se prosiguió con el procedimiento antes descrito. 18
Fase III: Desarrollo mecánico: Una vez establecidas las longitudes y los ángulos primordiales (de las barras que forman el mecanismo de suspensión) del sistema, se procedió a materializar cada una de estas “barras conceptuales” que forman el mecanismo. Dada la propia definición de la suspensión como mecanismo de 4 barras con el basculante “flotante”, el equipo de suspensión se encargará del desarrollo de 2 de las 4 barras del mecanismo, esto es, de la barra de entrada y la de salida en un mecanismo tradicional, las cuales se llamarán a partir de este momento, bieleta superior y bieleta inferior (en relación a su posición en la motocicleta). Las barras restantes que conforman el mecanismo (basculante y parte trasera del chasis) serán materializadas por otros grupos de trabajo de la motocicleta (bajo una serie de restricciones impuestas por el sistema de suspensión, como es lógico). El aspecto más destacable del desarrollo mecánico de todo el tren trasero de la motocicleta, y un concepto que debe entenderse a priori, antes de comenzar a explicar el proceso seguido en el diseño de estos componentes, es que, a diferencia de un sistema tradicional, todas las fuerzas y momentos que deben transmitirse desde la rueda trasera hacia el resto de la motocicleta (chasis) “pasan” a través del mecanismo de suspensión. Además de las fuerzas generadas como consecuencia de la actuación de la suspensión en el plano de la motocicleta, este sistema debe ser capaz de resistir y transmitir (con la rigidez adecuada) la fuerza de avance o motriz, las fuerzas laterales y los momentos debidos a la inclinación del vehículo (paso por curva), la tensión de la cadena, etc. Este aspecto es fundamental para comprender las hipótesis de diseño de las piezas. Las restricciones de tipo geométrico entran en juego ahora de nuevo, pues lo que antes estaba representado por una línea de trazo fino en la fase de diseño conceptual, se materializa ahora como un sólido con unas dimensiones que no deben afectar a otros elementos cercanos. Figura 3.5 Visualización del sistema de suspensión final diseñado 19
Otro aspecto fundamental en este desarrollo ha sido la posición de la cadena. Dada la existencia de las bieletas y el lugar que ocupan a lo largo del movimiento del mecanismo de la suspensión (y los necesarios puntos de pivote de las mismas con el chasis) se toma la decisión de proyectar un sistema asimétrico y poco convencional, en el que la cadena circula por el exterior de la zona trasera del chasis. De este modo, se consigue que la cadena no imponga ningún tipo de restricción sobre el mecanismo ni en el diseño estructural de los componentes implicados. Para compensar la reducción de espacio consecuencia de estrechar el chasis en su zona trasera izquierda por la condición mencionada, se mantiene una configuración “tradicional” en la parte derecha, dando lugar a la asimetría mencionada, todo con el objetivo de no perder rigidez a torsión en el tren trasero. Figura 3.6 Vista superior del tren trasero donde puede apreciarse la marcada asimetría del sistema Figura 3.7 Vista alternativa del sistema de suspensión donde puede apreciarse el inusual paso de la cadena 20
Finalmente, en cuanto a la colocación del amortiguador, se vuelve a jugar con el concepto de la asimetría por restricciones tanto geométricas como estructurales: la colocación del amortiguador en el plano medio de la motocicleta es una situación ideal, pues no se crea una asimetría en las cargas relacionadas con el accionamiento del mecanismo (compresión y descompresión del muelle). Sin embargo, esto no es viable dada la posición de la toma de admisión del motor y del airbox que lo alimenta. Es por ello que se toma la decisión de desplazar el amortiguador lateralmente. Se aprovecha esta situación para simplificar el diseño estructural del chasis, colocando el amortiguador justamente encima de la placa trasera derecha y conectando ambos elementos a través de 2 orejetas que transmiten la carga del amortiguador directamente a dicha placa. De este modo se consigue aislar las cargas debidas a la compresión del amortiguador de la zona tubular del chasis. Figura 3.8 Detalle de la zona del amortiguador donde puede apreciarse la cercanía del mismo a la admisión del motor 4 DESARROLLO CONCEPTUAL Esta fase constituye el segundo gran apartado en el desarrollo del proyecto. Se supone finalizada la fase inicial de elección de un esquema básico de mecanismo de suspensión tal y como ha quedado reflejado en la descripción general del desarrollo del proyecto previamente. Como ya se ha explicado también, esta fase está constituida a su vez por otras 2 tareas claramente diferenciables: En primer lugar, se desarrollan todas las simulaciones necesarias para poder caracterizar el comportamiento de la suspensión de forma adecuada, es decir, para poder calcular o valorar todas aquellas propiedades del mecanismo susceptibles de ser cuantificadas y que deban ser tenidas en cuenta a posteriori en la siguiente fase de la conceptualización. En segundo lugar, se desarrolla un programa de optimización, que consigue mejorar en la medida de lo posible todas las propiedades previamente calculadas. 21
Todo este desarrollo se ha llevado a cabo en el programa de cálculo matemático Matlab, y más concretamente, usando su herramienta de optimización “Optimtool”. 4.1 Modelo paramétrico Para poder abordar ambos problemas, se desarrolla en primera instancia un modelo paramétrico del mecanismo de suspensión. De esta manera, utilizando como parámetros las dimensiones características del mecanismo (longitudes, ángulos y localización de puntos fijos), este queda totalmente definido en el plano propio de la motocicleta cuando se le dan valores numéricos a dichos parámetros. La necesidad de desarrollar un modelo de este tipo parece evidente por la facilidad que aporta al trabajo “manual” de cambio de geometría básica del mecanismo en pruebas del tipo ensayo-error. Sin embargo, el motivo fundamental de que se haya desarrollado este modelo es por la fase de optimización. El algoritmo de optimización requiere la existencia de una serie de variables a optimizar, y dado que el objetivo es precisamente la definición de una geometría básica de mecanismo de suspensión que cumpla lo más adecuadamente posible una serie de propiedades (función objetivo) siguiendo las restricciones impuestas, el modelo paramétrico es totalmente indispensable. Los parámetros que constituyen el modelo se eligen de tal manera que sea factible cualquier cambio de geometría básica. No obstante, se define desde este momento, y como algo inalterable, la función que cumple cada barra del mecanismo y la conexión entre ellas: - La barra fija del mecanismo la constituye el chasis - Las barras de entrada y salida (articuladas con la fija de manera directa) reciben el nombre de bieletas (por continuar con la designación tradicional de los mecanismos comerciales empleados) - La barra acopladora está constituida por el basculante que, como ya se anunció, recibe el nombre de flotante dada esta característica. - Finalmente, el amortiguador va situado entre la bieleta superior y el chasis. Podría haberse elegido cualquier otra configuración de las muchas disponibles, pero se ha optado por esta por las ventajas que presenta a nivel accesibilidad y de disponibilidad espacial (existen muchos elementos adyacentes al mecanismo de suspensión, por lo que resulta muy importante situar el amortiguador en la localización más apta posible a priori. Una vez determinadas estas características básicas, se procede al modelado del mecanismo resultante. A continuación se muestra dicho modelo: 22
Figura 4.1 Modelo paramétrico empleado Donde pueden verse los siguientes parámetros y variables: - Longitudes de barras ( 2 , 2 ′ , 3 , 3 ′ , 4 , 5 ) - Ángulos de barras ( 2 , 3 ) - Localización de los pares de rotación de las bieletas al chasis con respecto al sistema de referencia ( 4 , ℎ4 , 6 , ℎ6 ) - Distancias y ángulos de CdG de barras ( 2 , 3 , 4 , 5 , 6 , 2 , 3 , 4 ) - Variables cinemáticas del mecanismo que definen la posición de cada barra y por tanto el estado del mecanismo ( 2 , 3 , 4 , 5 , 56) Los 3 primeros grupos contienen los que a partir de ahora se conocerán como parámetros del mecanismo (salvo L5). El cuarto grupo contiene la información necesaria para determinar las propiedades másicas de las barras del mecanismo (las cuales se comienzan por aproximar usando piezas similares de la motocicleta de la edición anterior) y finalmente, el quinto grupo contiene las variables del mecanismo (que definen la posición de las barras). Nótese también que está señalada la localización del sistema de referencia global, así como el sentido de giro considerado positivo. También están marcadas todas las barras que componen el mecanismo con un número identificativo y todos los pares de rotación entre las barras (los pares que involucran el chasis están designados como “On” siendo n el número de la barra adyacente, mientras que los restantes pares que se dan entre barras móviles aparecen designados con una letra mayúscula). Como puede observarse, con el modelo anterior se cumplen los requisitos impuestos de forma previa: dando valores numéricos a todos los parámetros disponibles, se puede llegar a definir por completo la geometría de cada barra. Si además de le dan valores a las 23
También puede leer

















































