Effect of the interaction design-manufacturing in the face contact modification with spiral bevel gears
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

Proceedings of the 5th Manufacturing Engineering Society International Conference – Zaragoza – June 2013
Effect of the interaction design-manufacturing in the face contact
modification with spiral bevel gears
(1) (2) (3) (4)
A. Martínez , L.N. López de Lacalle , Egile , A. Fuentes
(1)
Department of Mechanical Engineering, UPV/EHU (University of the Basque Country). alvaro.martinez@ehu.es
(2)
Department of Mechanical Engineering, UPV/EHU (University of the Basque Country).
(3)
Egile Group. Poligono Kurutz Gain. Mendaro
(4)
Department of Mechanical Engineering, UPCT (University of Cartagena).
RESUMEN
Se presenta un enfoque global del proceso de diseño y fabricación de engranajes espiro-
cónicos para transmisiones de potencia en motores aeronáuticos. El efecto que poseen los
parámetros de diseño en la determinación del patrón de contacto entre flancos de dientes
es analizado, así como su correspondencia con los parámetros de máquina. Se comparan
las posibilidades entre máquinas de diferente arquitectura, tecnología de corte y
precisión, atendiendo a la precisión y grado de acabado de los flancos.
Además se ha comprobado que parte de los problemas de durabilidad y fiabilidad de estos
engranajes radican en la focalización de la zona de contacto entre dientes
correspondientes. Esta zona puede cambiar en función de la estrategia de diseño,
máquina de fabricación e incluso del montaje final de los engranajes. Así se demuestra en
varios casos prácticos explicados en este trabajo. También se hace referencia a la medida
sistemática de este tipo de engranajes.
Keywords: Gear; Spiral; Conic; Contact; Pattern.
ABSTRACT
A global approach to design and manufacturing process of spiro-conical gears for power
transmission in aircraft engines is shown. The effect designing parameters have in
determining the pattern of contact between tooth flanks is analyzed and its
correspondence with machine parameters. Possibilities between different architecture
machines and precision cutting technology are compared, based on the precision and
finish of the flanks.
Furthermore, it has been found that problems of reliability and durability of these gears
lies with the contact zone between corresponding teeth. This area can be changed
depending on the design strategy, manufacturing machine and even in the final assembly
of the gears. This is demonstrated in several case studies discussed in this work. A
reference is also made to systematic measurement of this type of gears.
Keywords: Gear; Spiral; Conic; Contact; Pattern.
1. Introducción
1.1- Engranajes Espiro-Cónicos.
El concepto que se aplica para la fabricación de engranajes cónicos es exactamente el mismo que se
utiliza para la realización de engranajes rectos. Conseguir que la herramienta genere el movimiento de
engrane con aquel perfil con el que va a entrar en contacto. Existen dos corrientes totalmente
diferenciadas para fabricar estos engranajes.
a) Face Hobbing[7]: En este método existe una continua interpolación entre la pieza y la herramienta.
Todo está “indexando”. El diente generado de esta forma tiene un fondo de diente y cabeza que
van paralelas.
Proceedings of the 5th Manufacturing Engineering Society International Conference – Zaragoza – June 2013
Figura 1. Generación del diente mediante face hobbing.
b) Face Milling: En este caso, la ley de movimiento que genera el diente es un círculo ya que las
cuchillas en el cortador realizan un movimiento circular mientras el engranaje se mantiene fijo en
una determinada posición angular.
Figura 2. Generación del diente mediante face milling.
1.2- Evolución de las máquinas para engranajes espiro-cónicos
Los cambios sufridos en las máquinas a lo largo de los años ha sido producida por un continuo interés en
poder controlar cada vez más cada parámetro del proceso y no depender de un movimiento mecánico y
cerrado. Una modificación en la superficie de la pieza suponía un “rediseño” en toda la cadena
cinemática que genera el perfil del diente, figura 3.
Figura 3. Evolución de máquina para tallar engranajes espiro-cónicos. a) Clásica. b) Con CNC
Las nuevas tecnologías introducidas en los últimos años han propiciado una mayor posibilidad de
regulación de todos los parámetros que afectan al engranaje. En un engranaje espiro-cónico esto es de
gran importancia ya que una pequeña modificación puede hacer que el contacto entre superficies
mejore ostensiblemente. En las figura 3 se muestra la complejidad del mecanismo necesario para
generar un engranaje espiro-cónico así como la última tecnología para la generación de estos
engranajes.
2. Caso de estudio: engranajes espiro-cónicos
La manera de trabajar con este tipo de engranajes difiere totalmente de lo que sería con un engranaje
cilíndrico de dientes rectos. En engranajes de dientes rectos, todas las fases que intervienen desde su
diseño hasta su montaje pueden ser independientes entre ellas. El control de estos engranajes está
perfectamente definido en las normas internacionales por lo que medir y corregir los fallos es
relativamente sencillo. Además todas las correcciones a realizar son por norma general, muy intuitivas.
El montaje de una pareja de engranajes no influye demasiado en la zona de contacto ya que lo
parámetros a modificar son escasos. La intercambiabilidad entre ruedas es uno de los puntos a lograr en
su producción y montaje.
En los engranajes espiro-cónicos los conceptos utilizados hasta ahora se desvanecen. Las fases que
engloban el ciclo de la pieza desde el diseño hasta el montaje de la misma se convierten en una sola. En
Proceedings of the 5th Manufacturing Engineering Society International Conference – Zaragoza – June 2013 este caso, no se puede trabajar de manera independiente entre unas y otras. Todas las fases van a estar unidas dentro de un ciclo global. En este artículo se plantea un método de trabajo para reducir al máximo el número de iteraciones necesarias, mediante un método de trabajo realimentado entre las primeras etapas de diseño- fabricación-control de calidad. Además, se introduce la fabricación de la pieza mediante el proceso de rectificado desde sólido, que es un proceso muy dirigido a series cortas. El rectificado además induce el problema añadido de quemado y control del proceso. 2.1- Tipología de pieza a estudiar El sector al que van a ir dirigidas las piezas de este caso de estudio, es el sector aeronáutico. Los pares de engranajes espiro-cónicos utilizados en aeronáutica tienen que tener la mejor calidad en cuanto a error de paso se refiere llegando a ser necesario cumplir la calidad DIN 1 a DIN 3[11]. Por supuesto la fiabilidad de los componentes es un factor crítico en cualquier componente introducido dentro de un avión. Las piezas tratadas son piezas conocidas como críticas, estas son las que en caso de fallar el avión no podría seguir volando. Igualmente importante son otros aspectos como acabado superficial, radio de fondo del diente, conseguir un error de transmisión bajo, alta resistencia mecánica y bajo peso. El principal reto a conseguir, es conseguir un “ease-off” en la fase de diseño que sea aceptable y tratar de plasmarlo en la realidad. Para poder superar los requisitos de desgaste y resistencia mecánica, estas piezas como normal general deberán ir con un tratamiento superficial que les de dureza. En este caso, el tratamiento superficial es un cementado. El material de partida es un E16NCD13. El estado previo al tratamiento es recocido. Se le pedirá una capa de cementado de entre 0,65 y 0,8 mm. Tras el cementado será necesaria una operación de temple y revenido. La dureza superficial a conseguir es de 58-62 HRC. También es necesario mencionar que el número de piezas a fabricar no son elevadas. No más de 20 piezas. 3. Metodología de trabajo. Ciclo cerrado En la figura 4, se muestra la secuencia de trabajo a seguir para conseguir realizar un set de engranajes con las características de calidad definidas previamente. La primera fase del ciclo, es la de diseño (4a). En esta fase es donde nace la concepción de las superficies del engranaje, aquí se decidirá cómo deberá ser el contacto entre superficies para un correcto funcionamiento. Una vez terminada esta fase, las superficies serán enviadas (4b) a la máquina para su fabricación (4c) y a la máquina de control (4d) para su medición posterior. Tras recibir las superficies en la rectificadora, se mecanizarán las superficies (4e). Esta primera fabricación generará unas superficies que no serán las ideales, por esto, las piezas se han de medir para indicar las diferencias entre las superficies teóricas y las reales conseguidas en la rectificadora (4f). Tras analizar las diferencias existentes, el departamento de ingeniería realizará las correcciones necesarias para llegar a la superficie ideal diseñada (4g). Con estas nuevas correcciones, se vuelve a la máquina para volver a rectificar las superficies. Tras este ciclo cerrado, las piezas que salen tras estas operaciones son piezas cuyas superficies entran dentro de los límites de calidad exigidos. Trabajando de esta manera, involucrando a todas las fases (diseño-fabricación-control) se consigue una producción estable desde la primera pieza. Una vez que se consigue la primera pieza, el proceso de fabricación puede continuar sin depender de los demás departamentos ya que la calidad de la pieza ya está asegurada gracias a la metodología de trabajo explicada. En los apartados siguientes se muestra más detalladamente cada fase del proceso.
Proceedings of the 5th Manufacturing Engineering Society International Conference – Zaragoza – June 2013
Figura 4. Metodología de ciclo cerrado para reducir tiempos de fabricación.
4. Etapa 1: diseño engranaje espiro-cónico
Como primera fase, se trata de buscar un set de engranajes espiro-cónicos que sean capaces de
proporcionar unas características de durabilidad y resistencia elevadas. Por lo tanto, se ha de buscar en
todo momento que la zona de contacto sea aquella que proporcione el menor error de transmisión[7],
además de que las tensiones de contacto no superen valores críticos para el material.
Para realizar el estudio y la mejora se ha de partir del diseño inicial, figura 5, para ver si este es válido o
si por el contrario se puede mejorar. En este caso, el análisis de la pareja de engranajes proporciona los
siguientes resultados.
Figura 5. Comportamiento del set de engranajes en el diseño inicial. a) Zona de contacto y error de
trasmisión, b) Tensiones de Von Mises en la superficie del diente.
El resultado obtenido en esta primera fase de diseño no es el deseado. La zona de contacto no sigue una
línea teórica ideal, de hecho ni se acerca. En cuanto al error de transmisión, los valores son demasiado
elevados para que durante el funcionamiento no exista ningún problema, por lo tanto tampoco es
válido. Por último, se ve que existen zonas donde la tensión de contacto es demasiado elevada.
El primer paso en la optimización está dirigido en la búsqueda de la mejor dirección de contacto que sea
capaz de soportar el mayor error de posicionamiento. Como se puede ver en la figura 6, la nueva
dirección de contacto ofrece una mejor distribución del área de contacto mejorando ostensiblemente el
funcionamiento de dicho par de engranajes. Añadiendo ligeras modificaciones en los parámetros de
máquina se consigue un perfil del flanco mejorado.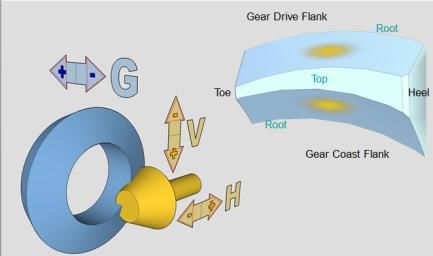
Proceedings of the 5th Manufacturing Engineering Society International Conference – Zaragoza – June 2013
Figura 6. Comportamiento del set de engranajes en el diseño optimizado. a) Zona de contacto y error de
trasmisión, b) Tensiones de Von Mises en la superficie del diente.
Debido a la gran complejidad del problema, y debido al tipo de pieza al que se hace frente. El mejor
método para conseguir lograr los requisitos de calidad, es el método de rectificado por flanco
independiente. En este formato de fabricación, cada flanco se fabrica sin tener en cuenta el contrario.
Se consigue que cualquier modificación que se realice en un flanco cóncavo por ejemplo, no sea copia al
flanco convexo, ya que la herramienta no estará nunca en contacto con los dos flancos a la vez.
5. Etapa 2: fabricación por rectificado desde sólido
En este caso, se utilizarán dos muelas idénticas pero que a posteriori una irá dirigida al flanco convexo y
la otra al flanco cóncavo. Debido a las calidades que se quieren conseguir, se ha de asegurar que las
piezas en el momento en el que llegan a la máquina, tengan una cara de apoyo y un diámetro de
referencia para poder centrar la pieza en la máquina. El error total que se obtenga en el engranaje será
la suma de todos los errores inherentes provocados por divergencias en el proceso de fabricación.
Por último queda definir en qué máquina se van a realizar las operaciones de fabricación (Etapa 2) y de
control (Etapa 3). La máquina de la que se dispone para realizar estos ensayos es la máquina PHOENIX
275G (figura 11a) con cabezal de alta velocidad de la compañía GLEASON, una máquina de rectificado
compacta y versátil que ayudará a conseguir dicho propósito siempre y cuando se tenga en cuenta las
restricciones que impone esta máquina: a) Diámetro de muela 69 mm ≤ Ø ≤ 230 mm, b) Anchura
máxima del diente = 58 mm, c) Revoluciones máximas del spindle = 12000 rpm, d) Diámetro primitivo
máximo de la corona = 275 mm. Esta máquina también brinda la posibilidad de hacer el rectificado
desde sólido. Con este proceso, se evita tener que comprar nuevas herramientas para realizar un previo
desbaste de la pieza, se gana tiempo (puesta a punto de nuevas herramientas) y dinero (no hay que
invertir en diferentes herramientas).
6. Etapa 3: medida y reajuste de parámetros
Cuando uno se va a poner a fabricar, no dispone de los mismos datos de control que en cualquier otra
tipología de engranajes[11] (Error individual de paso (fp), error total de división (Fp), error total de hélice
(Fβ), error total de perfil (Fα), etc.) es por ello, que lo único que se puede hacer es tratar de fabricar la
superficie más parecida a la diseñada previamente. Para poder ver las diferencias existentes entre lo
que se fabrique y lo que se ha diseñado se pone a disposición de los ensayos la máquina de medición de
engranajes 350 GMS de la compañía GLEASON, figura 7b. Esta máquina está compuesta por unas reglas
ópticas de 0,1 μm que permiten mantener la incertidumbre expandida[10] en 1 μm siempre y cuando la
temperatura del ambiente esté entre 20ºC ± 2ºC.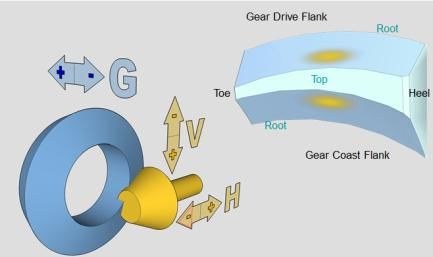
Proceedings of the 5th Manufacturing Engineering Society International Conference – Zaragoza – June 2013
Figura 7. a) Rectificadora engranajes espiro-cónicos desde sólido, b) Máquina medición de engranajes
espiro-cónicos.
Una vez definidos los utillajes, herramientas y máquinas es el momento de empezar a fabricar. En este
instante se necesita que la fase de diseño, fabricación y control estén unidas. A continuación se procede
a introducir una metodología de trabajo mediante un ciclo cerrado entre ellas para poder realizar una
fabricación estable.
Tras haber realizado el conveniente diseño buscando el óptimo contacto entre las superficies, se
deberán mandar estas superficies generadas a la máquina mediante un post-procesado. Al mismo
tiempo, para un posterior control en la máquina de medición, también se enviarán dichas superficies
teóricas a la máquina de control. Como se ha comentado anteriormente, el método de fabricación que
se va a utilizar es el de flancos independientes. El proceso de fabricación necesario para poder realizar
correctamente las piezas se ha determinado que sea: 1-Desbaste del lado convexo. 2- Desbaste del lado
cóncavo. 3- Cementado. 4-Acabado lado convexo. 5- Acabado lado cóncavo. 6-Ataque nital.
Es evidente que realizar el proceso en tantas fases puede llegar a parecer excesivo pero debido a la gran
complejidad del problema, es la manera más fiable de asegurar la calidad del producto. El primer paso
es el desbaste previo al cementado. Una vez terminada la operación, se comprobará qué tipo de
superficie se ha generado. Para poder ver que se ha obtenido, se procederá a la medición mediante
puntos de la superficie. En este caso, la malla elegida es una malla de 9 columnas y 5 filas. Es decir, la
superficie quedará determinada por 45 puntos. En la figura 8, se muestra la disposición de la malla.
Figura 8. Distribución de la malla para la medición.
Como se ha comentado, no se tiene de parámetros de control para saber si está bien o mal, lo único que
se tiene es una superficie teórica la cual se deberá contrastar con la superficie generada. En la figura 9
se muestra la comparación entre la superficie teórica y la superficie mecanizada.
La malla negra representa la superficie teórica previamente diseñada. La roja muestra cual es la
distorsión actual con respecto a la teórica. Para poder corregir estas desviaciones, vuelve a entrar en
juego la fase de diseño. Tras recibir la información de los errores, pueden hacer las modificaciones
necesarias para corregir dicho error. Las correcciones han de ser lo más simples que sean posibles ya
que cuanto más complicadas sean, mayor será la complejidad del movimiento a realizar por la máquina.
Una vez que se tienen los parámetros necesarios para corregir los errores, se han de volver a mandar la
máquina, para que en el próximo ciclo realice las correcciones. Como se puede observar, tras mecanizar
y volver a medir se obtienen los siguientes resultados:
Figura 9. a) Errores generados en la primera fase de fabricación. b) Superficie generada tras las
correcciones.
Como se puede apreciar, el concepto típico de los talleres, intentando ser independientes de ingeniería
no funciona en este tipo de piezas. Ambos grupos deben trabajar juntos si quieren conseguir un
producto con unos requisitos tan especiales.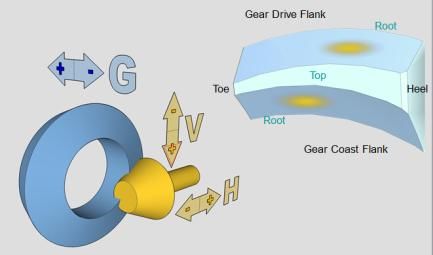
Proceedings of the 5th Manufacturing Engineering Society International Conference – Zaragoza – June 2013
Para complicar aún más la fabricación de este engranaje, se comento anteriormente que debería de
llevar un cementado. Este cementado se realiza tras el desbaste explicado anteriormente. Se
aprovechará esta operación previa del cementado para conseguir que la superficie desbastada sea lo
más parecida a la superficie final acabada. Así estará preparada la máquina para el acabado. Una vez
que se tiene una zona limpia se puede volver a montar la pieza en el utillaje para comenzar con la
operación de acabado. La operación de desbaste se realizó con el método de rectificado desde sólido,
por lo tanto en cada pasada existía la misma cantidad de material. Ahora, tras el cementado y con la
deformación sufrida no se tiene el mismo material en todo el flanco lo que va a complicar aún más la
puesta a punto para finalizar el engranaje. Si a la hora de rectificar, se excede con la potencia aplicada,
puede suceder que se sobrepase la temperatura de revenido, se tenga un cambio estructural en la pieza
y por tanto la pieza sufra quemados. Si esto sucede, la pieza queda directamente rechazada.
El proceso a seguir para acabar la pieza, es el mismo que se ha utilizado para el desbaste. Se tiene que
volver a utilizar la interacción entre fabricación-diseño-control para tener la superficie deseada. Para
poder validar el proceso, como se ha rectificado sobre zona cementada, se ha de realizar un ataque nital
a la pieza para ver que en ningún momento esta pieza ha sufrido quemaduras en su superficie.
7. Montaje final
Que la pieza haya superado los previos requisitos de calidad, no supone que la pieza esté perfectamente
lista para la fabricación en serie. Para ver si realmente lo fabricado es lo que se diseñó, hay que realizar
una última operación manual. En esta operación se harán funcionar los engranajes en su posición de
montaje para ver dónde queda la zona de contacto. En la figura 10 se muestra el resultado.
Figura 10. Comprobación de la superficie de contacto. a) Lado conductor piñón, b) Lado conducido
corona.
Si este contacto queda en la zona deseada, se podrá dar por válido el diseño, la fabricación y el montaje.
Si no es así, existen varias posibilidades para poder modificar ligeramente el contacto a lo largo del
flanco que se muestran a continuación en la figura 11 y la figura 12:
a) Subir y bajar el contacto si se introduce o se saca el piñón dentro de la corona.
Figura 11. Modificación del contacto hacia el fondo o cabeza del diente en el montaje.
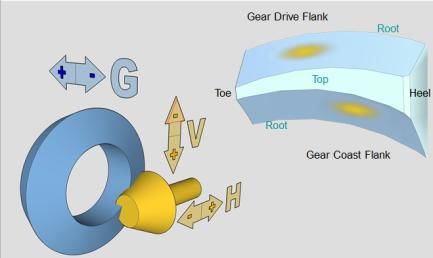
b) Desplazar el contacto a lo largo del flanco, hacia un lado o hacia el otro, subiendo y bajando el
piñón en la dirección V.
Figura 12. Modificación del contacto a lo largo del flanco en el montaje.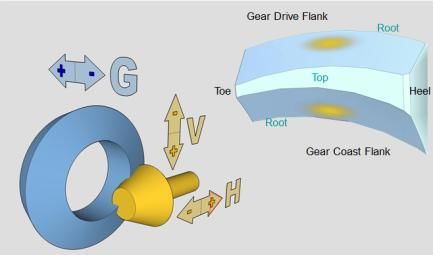
Proceedings of the 5th Manufacturing Engineering Society International Conference – Zaragoza – June 2013 Estas modificaciones en el montaje tienen la desventaja de que a partir de este momento, para mantener las propiedades en la zona de contacto que se han conseguido este par de engranajes, no se podrán intercambiar con otros engranajes. Estos dos, estarían unidos de por vida. 8. Conclusiones En este trabajo se ha presentado un método de trabajo que minimiza el tiempo de producción de engranajes complejos, y además se han presentado líneas de desarrollo que permitan entrar en proyectos de diseño y optimización de trasmisiones complejas y de alta responsabilidad. De esta forma es posible fabricar engranajes que aseguren al menos “second part- rigth part”, en el complejo problema de los cónicos espirales. Donde desde el inicio hasta su fabricación, todas y cada una de las partes tiene una importancia determinante en el producto. El trabajo además ha permitido generar y actualizar nuevo know how que está ya integrado en los planes formativos del grado de Ing Mecánica y una Master, y un grupo consolidado en nuestro entorno que pueda integrarse en proyectos complejos. De esta forma se rompe una realidad que hasta la fecha ha ocurrido, que se fabrican engranajes pero con la debilidad de que todas las fases del engranaje no estaban interrelacionadas entre ellas. A partir de este momento se pretende poner en práctica este proceso para la mejora de la producción. Se soluciona el problema de los rechazos de piezas como consecuencia de la realización de los engranajes mediante prueba y error. Un solo ciclo es necesario para la fabricación del engranaje. 9. Agradecimientos El autor quiere agradecer la financiación recibida de Mimeco dentro del Proyecto INNPACTO ENNGRANA que ha hecho posible la consecución de este trabajo. 10. Referencias [1] R.Endoy, Gear Hobbing, Shaping, and Shaving: A Guide to Cycle Time Estimating and Process Planning, SME. (1990) [2] Franklin Day Jones, Henry H. Ryffel. Machinery´s Hadbook. Industrial Press Inc.. (1961) [3] Angulo, C.; López de Lacalle, L.N.; Agirrebeitia, J.; Pinto, Ch.; ELEMENTOS DE MÁQUINAS. ISBN: 978- 84-95809-27-8. Sección de Publicaciones de la E. T. S. Ingeniería de Bilbao. (2007) [4] G.G. Baránov. Curso de la Teoría de Mecanismos y Máquinas. EDITORIAL MIR. Pp. 209-326. (1980) [5] Vilmos V. Simon. Influence of tooth modifications on tooth contact in face-hobbed spiral bevel gears. Mechanism and Machine Theory, 46 (2011), pp. 1980-1998. [6] Chung-Yunn Lin, Chung-Biau Tsay, Zhang-Hua Fong, Computer-aided manufacturing of spiral bevel and hypoid gears by applying optimization techniques, Journal of Materials Processing Technology, 114 (2001), pp. 22-35. [7] Faydor L. Litvin, Alfonso Fuentes, Kenichi Hayasaka. Design, manufacture, stress analysis, and experimental tests of low-noise high endurance spiral bevel gears. Mechanism and Machine Theory, 41 (2006), pp. 83-118. [8] Guenther. Interpretation of bevel gear topography measurements. CIRP Annals - Manufacturing Technology, 60 (2011), pp. 551-554. [9] Ying-Chien Tsai, Wei-Yi Hsu. The study on the design of spiral bevel gear sets with circular-arc contact paths and tooth profiles. Mechanism and Machine Theory, 43 (2008), pp. 1158-1174. [10] ISO: ISO Guide to the Expression of Uncertainty in Measurement, International Organization for Standarization, Geneva, 1993 (corrected & reprinted 1995), ISBN 92-67-10188-9, (1995) [11] DIN 3960: Concepts and Parameters Associated with Cylindrical Gears and Cylindrical Gear Pairs with Involute.

También puede leer

















































