DISEÑO Y DESARROLLO DE UN SISTEMA DE DETECCIÓN Y ALARMA ANTI-ATROPELLOS
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación
DISEÑO Y DESARROLLO DE UN SISTEMA DE DETECCIÓN Y ALARMA ANTI- ATROPELLOS

ÍNDICE
1.- Objetivo del proyecto............................................................................... 3
2.- Problemática y necesidad del proyecto................................................. 3
3.- Entorno operativo..................................................................................... 4
4.- Líneas maestras de la solución diseñada.............................................. 4
4.1.- Descripción general del sistema............................................... 4
4.2.- Descripción detallada de la solución adoptada....................... 7
4.2.1- Subsistema de posicionamiento....................................... 7
4.2.2.- Subsistema de comunicaciones...................................... 8
4.2.3.- Subsistema de control..................................................... 9
4.3.- Estudio de la respuesta fisiológica a la vibración.................... 10
4.4.- Pruebas de campo...................................................................... 11
ANEXO FOTOGRÁFICO................................................................................. 13
Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 2
SISTEMA DE DETECCIÓN Y ALARMA ANTI- ATROPELLOS 1.- Objetivo del proyecto El objetivo del proyecto es el desarrollo de un sistema de detección y alarma para evitar los atropellos en las obras de construcción. Se pretende con ello garantizar la seguridad de los operarios en obras de extendido y compactación de firmes frente a atropellos accidentales causados por los vehículos especiales que trabajan en las citadas operaciones de compactación. El objetivo último del proyecto es por tanto salvar vidas humanas. 2.- Problemática y necesidad del proyecto Durante los últimos años se están produciendo en el entorno de la construcción de obras civiles numerosos accidentes provocados por distintas causas. Un porcentaje importante de los mismos se debe a atropellos de las máquinas dedicadas al proceso de extendido y compactación de las tierras y diversas capas de firme. Las operaciones de compactado en obra de carretera llevan asociada la presencia en un entorno físico relativamente reducido de operarios a pie y maquinaria en movimiento, lo que implícitamente conlleva un riesgo de atropello hacia el personal situado en las inmediaciones de los vehículos de compactación. En la actualidad, los medios de prevención utilizados pueden considerarse insuficientes, ya que de hecho las cifras de siniestralidad catalogan las operaciones de compactado de viales como de alto riesgo frente a atropellos o daños por alcance a los operarios de a pie. Estos medios son simples en su planteamiento e incluyen avisadores acústicos y luminosos de marcha atrás en la máquina y la utilización de chalecos reflectantes en los operarios de a pie para facilitar su identificación por parte del conductor del vehículo de compactado. La rutina laboral a la que se ven sometidos los operarios, constantemente apercibidos del sonido de la señal acústica, hace que disminuya su efecto preventivo, eliminando la sensación de alerta que podría representar para un operario recién incorporado al entorno físico de trabajo. Si a este factor se añade el hecho de trabajar en un entorno de trabajo con un nivel sonoro alto, propio del sector de la construcción y las obras públicas, se Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 3

puede deducir que la alerta acústica de la máquina ofrece un margen de
protección reducido frente a los riesgos que se pretenden evitar.
3.- Entorno operativo
El entorno operativo de una tarea de extendido y compactación está delimitada
por los siguientes parámetros:
• Un vial de características y dimensiones variables en función de la
obra.
• Dos o más máquinas compactadoras trabajando en sentidos
opuestos y alternativos (avante/atrás) y desplazándose por el eje
longitudinal del vial, a una velocidad de régimen de unos 6 km/h y
con una velocidad máxima de 10-15 km/h.
• Un equipo a pie de obra formado por un máximo de 20 operarios,
desplazándose a una velocidad máxima de 3 km/h.
• Una máquina extendedora que trabaja previamente a la
compactadora, con un equipo de operarios de a pie con herramienta
manual para apoyo a la faena de extendido, trabajando en las
proximidades de la regla. En ocasiones, la máquina compactadora y
la entendedora trabajan muy próximas la una a la otra.
• Unas condiciones ambientales especialmente agresivas derivadas en
general del trabajo a la intemperie y en particular a las altas
temperaturas de extendido del aglomerado (150 ºC).
4.- Lineas maestras de la solución diseñada
4.1.- Descripción general del sistema
El sistema consiste en un sistema automático y activo para la detección de
riesgo de atropello o accidentes de operarios por alcance de las máquinas
compactadoras bajo las condiciones de entorno enumeradas en el apartado
anterior, y basado en la aplicación de las tecnologías electrónicas y de
telecomunicaciones más avanzadas para asegurar el aviso personalizado a
todos y cada uno de los miembros del equipo de trabajo.
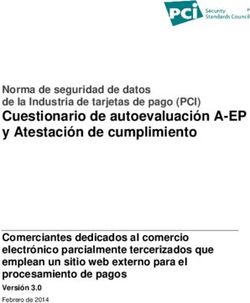
El sistema, de acuerdo al esquema representado por la Figura 1, está basado
en terminales autónomos para operarios de a pie (Terminales de Operario -
T.O.) y para vehículos (Terminales de Vehículo - T.V.). Ambos tipos de
terminales están basados en transmisores inalámbricos inteligentes en banda
libre con receptor GPS integrado.
Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 4
Figura 1: Esquema de la solución propuesta
Los receptores GPS reciben la posición a través de un sistema basado en una
constelación de satélites con la mayor exactitud posible, de acuerdo con el
momento tecnológico actual, en la medida de posición. Este parámetro, junto
con el tiempo de refresco, es de la máxima relevancia para asegurar la
viabilidad del proyecto.
La comunicación entre los Terminales de operario (T.O.), y los Terminales de
vehículo (T.V.) utilizando una comunicación inalámbrica se realiza por un
radioenlace en banda libre, lo que implica para los protocolos más habituales
un tiempo de comunicación entre terminales prácticamente despreciable con
respecto al tiempo total a considerar.
Una vez transmitida la información entre los T.O y los T.V, el sistema determina
si la persona se encuentra dentro de un área de riesgo previamente
configurada en el mismo.
En caso de que así sea, el sistema es capaz de:
• Generar un mensaje de aviso al terminal del operario afectado, de
forma que éste pueda reaccionar con tiempo suficiente para retirarse
de la trayectoria de atropello.
Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 5
• Realizar la misma acción con el terminal del conductor del vehículo,
avisándole del posible atropello que le permita detener el vehículo
antes de que se produzca.
• Generar una posible señal automática de parada del vehículo, si se
considerase oportuno de implantar, de forma que el vehículo fuese
reduciendo su velocidad y evitase atropellar al usuario.
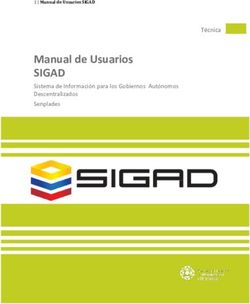
En la siguiente figura se pueden observar las áreas de seguridad y riesgo
delimitadas alrededor de la máquina. Aunque se han dibujado las áreas de
seguridad hacia delante y hacia atrás, solo una de ellas se encontraría activa
como zona de riesgo teniendo en cuenta el sentido de marcha de la máquina.
Figura 2: Vista en planta de las áreas de riesgo y seguridad.
Para la detección del sentido de marcha se utiliza la información de rumbo que
se puede obtener del sistema GPS.
Dentro del área troncocónica dibujada en la figura anterior, se definen dos
zonas diferentes en función de la posición en la que se encuentre el operario:
• Una zona de atropello, dibujada en rojo en la figura 2, en la que el
operario no tiene un tiempo mínimo para salir al área de seguridad
frente a atropellos. Lógicamente la forma de esta área es un triángulo
cuya altura depende de la velocidad a la que se desplace la máquina.
• Una zona de seguridad (donde el aviso permitirá al operario salir con
seguridad de la trayectoria de atropello), en verde en la Figura 2, que
se corresponde a la zona en la que el operario deberá ser avisado
para que salga de la misma. Por simplificar, esta zona de seguridad
se delimita hasta una distancia de la máquina y con un ancho mayor
Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 6
que el ancho de la máquina para delimitar la posibilidad de un posible
cambio de rumbo del vehículo y para considerar la posible
imprecisión en el cálculo del mismo. Por tanto, el largo de esta zona
de seguridad dependerá de la velocidad de la máquina. El ancho de
esta zona de seguridad dependerá de la capacidad de cambio de
rumbo y de la imprecisión en el cálculo del mismo.
4.2.- Descripción detallada de la solución adoptada
La solución está basada a su vez en la resolución de tres problemas
claramente diferenciados:
• La determinación automática de la posición de vehículo y operarios.
• La transmisión bidireccional de información entre vehículo y
operarios.
• La detección automática de situaciones de riesgo para los operarios.
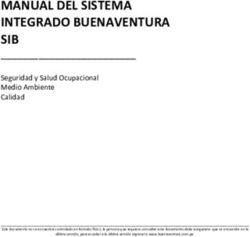
La composición conceptual del sistema está integrada por tres soluciones
técnicas claramente diferenciadas e interrelacionadas entre sí para resolver
respectivamente las problemáticas descritas, de acuerdo al concepto expuesto
en la figura siguiente:
Figura 3: Estructura conceptual del sistema.
4.2.1- Subsistema de posicionamiento
La determinación de la posición resulta el aspecto más comprometido y de
mayor importancia del proyecto.
Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 7
Como punto de partida se analizó la viabilidad de utilizar un Sistema Global de
Navegación por Satélite (o su acrónimo anglosajón GNSS) para determinar la
posición de tanto operarios como vehículos.
Un sistema GNSS tiene por objeto ofrecer a receptores fijos o móviles
información sobre su posición geofísica (latitud, longitud, altura), de forma
automática, utilizando métodos de posicionamiento del receptor con respecto a
una constelación de satélites en órbita terrestre.
Se decidió la utilización del Sistema Global de Navegación por Satélite
conocido como Sistema de Posicionamiento Global o GPS actualmente en
servicio para la determinación automática de la posición de vehículos y
operarios.
Además el sistema consta de una infraestructura de campo integrada asimismo
por un conjunto de unidades receptores GPS móviles con destino a los T.V. y
T.O.
4.2.2.- Subsistema de comunicaciones
Para el subsistema de comunicaciones se optó por la utilización de un sistema
de transmisión de datos en radiofrecuencia de banda libre, suficiente para
cubrir en condiciones normales el área de trabajo necesaria y en una banda de
libre utilización.
Para la conexión en radiofrecuencia entre los radiomodems se decidió la
utilización de una red local inalámbrica (WAN) de largo alcance de tipo Zigbee,
tecnología elegida por sus especiales características técnicas, con unos
tiempos de enlace en principio despreciables con respecto a los del subsistema
de posicionamiento.
La solución Zigbee se escoge frente a otras analizadas, tales como Bluetooth,
Wi-fi, o incluso la reconocida TDMA, por resultar más ventajosa en algunos o
incluso la totalidad de los siguientes aspectos de vital importancia para la
aplicación que nos ocupa:
• Excepcional relación consumo/alcance.
• Posibilidad de gestionar remotamente el consumo de los módulos.
• Amplia flexibilidad en la topología de la red, admitiendo tres
arquitecturas diferentes y su utilización en una misma red.
• Tiempo de latencia reducido; funciones especiales para redes donde
el tiempo de ciclo es crítico.
• Inteligencia integrada utilizando lenguajes de programación de alto
nivel.
• Alta capacidad en la cantidad de datos enviados por trama y
existencia de procedimientos de fragmentación en caso de superarse
la limitación.
• Capacidad de autorregeneración en caso de cada de uno o varios
participantes.
Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 8
4.2.3.- Subsistema de control Este sistema lleva las rutinas de control integradas en el módulo de control embebido en la placa de comunicaciones de última generación Zigbee para los terminales de operario. De esta forma se evita la utilización de un hardware específico, simplificando el diseño y reduciendo costos económicos y consumo de las baterías. Para la detección automática del sentido de avance, se ha utilizado un chip acelerómetro. La secuencia de operaciones en el funcionamiento del sistema es la siguiente: El terminal del vehículo emite una señal determinada vía GPS, indicando su posición, rumbo y velocidad en modo de difusión (broadcast), de manera que la reciban el conjunto de terminales de operarios existentes. Esta señal es recibida por cada uno de los terminales de operario, los cuales realizan de igual manera un cálculo de su posición, rumbo y velocidad. En ese momento el subsistema de control realiza el cálculo automático de la trayectoria de la máquina compactadora y de la posición prevista de cada operario, teniendo en cuenta si éste se encuentra en movimiento. Con estos dos cálculos, el sistema determina si el operario está o es susceptible de estar en breve dentro del área predeterminada como de peligro, y en ese momento, el sistema procede a la activación de los dispositivos de aviso al operario de la alarma de riesgo. En este sentido, en la solución final adoptada el cálculo de las distancias se realiza dinámicamente, teniendo en cuenta la velocidad real de la máquina calculada durante su operación, es decir, el sistema se ha diseñado de manera que en cada momento tiene en cuenta la velocidad real de la máquina para establecer los márgenes de seguridad. El margen de seguridad se establece entonces en el tiempo mínimo de preaviso hacia el operario. Es este tiempo mínimo el que hay, por tanto, que garantizar. Con ello se solucionó el problema de garantizar que las máquinas se movieran siempre a la misma velocidad, puesto que ello depende en cada momento de cada conductor. Se optó por diseñar un sistema que ofreciera una máxima protección a los trabajadores, independiente de la velocidad a la que se pudieran mover las máquinas, ya que el propio sistema se adapta en todo momento a estas variaciones de velocidad, y calcula las distancias de seguridad de manera instantánea en función de la velocidad real de las máquinas en cada momento. Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 9

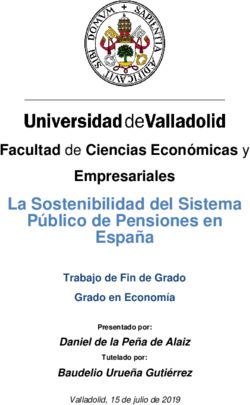
4.3.- Estudio de la respuesta fisiológica a la vibración Paralelamente se desarrolló este estudio, cuyo objetivo era encontrar las zonas corporales con una respuesta más sensible y más rápida a los estímulos vibratorios, para que de esta manera los dispositivos de aviso a los operarios fueran lo más eficaces posible. Para ello se analizó la distribución espacial en la superficie corporal (cabeza, tronco y extremidades) de la sensibilidad cutánea a la vibración, y la variación del tiempo de respuesta dependiendo de la frecuencia y de la amplitud del estímulo vibratorio. Para ello se utilizó un vibrador electromagnético de 5 cm de diámetro conectado a un ordenador, que permitía generar oscilaciones sinusoidales de distinta amplitud y frecuencia. El vibrador se fijó a la piel del tronco, y así mismo se colocaron unos electrodos de electromiograma en el músculo bíceps braquial del brazo derecho, y se instruyó al sujeto para que flexionara el codo en el momento que percibiera la vibración. El registro de la actividad eléctrica en el músculo permite detectar el momento en que se inicia el movimiento voluntario en respuesta al estímulo. Asimismo, se colocó otro electrodo sobre el vibrador para registrar el estímulo aplicado, y se registró en un canal paralelo al electromiograma. Ambos canales se registraron mediante un conversor analógico-digital en un ordenador portátil. El ordenador permite medir la diferencia de tiempo entre el comienzo del estímulo y el inicio de la actividad eléctrica en el músculo bíceps, que se tomó como la latencia o tiempo de respuesta. En el siguiente gráfico se indican las partes del cuerpo donde se realizaron las pruebas: Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 10
Figura 4. Localización anatómica de los puntos de estimulación en cabeza, tronco y extremidades. Los resultados indicaros que la estimulación óptima se consigue aplicando estímulos a una frecuencia de 200 Hz sobre la línea media del tórax. Este estímulo es el que produce una respuesta con un menor retraso, y el que se percibe a intensidades más débiles. 4.4.- Pruebas de campo Se realizaron pruebas del prototipo desarrollado en entornos reales de obras en ejecución. En estas pruebas se verificó que el sistema es capaz de emitir todos los avisos en tiempo y forma previstos. El sistema permite variar la distancia a la que se emite la señal de aviso al operario cuando entra en el radio de acción de la máquina, situación que fue comprobada repetidas veces durante las pruebas. Además en las pruebas se comprobó el resultado en entorno real de las pruebas realizadas en laboratorio en lo concerniente a la respuesta fisiológica a las vibraciones, verificándose que los resultados coincidían con los esperados. Además de pruebas reales en obra con equipos de extendido, se decidió realizar otra serie de pruebas concretas y específicas para tener en cuenta situaciones poco habituales en obra, pero que pudieran llegar a presentarse de manera puntual y pudieran provocar un funcionamiento erróneo del sistema. Estas pruebas se concretan en tres grandes bloques: Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 11
• Prueba sobre la influencia del alcance del sistema debido a
atenuaciones que se pueden producir en obra. Básicamente estas
atenuaciones se pueden deber a que se encuentren obstáculos
intermedios, como otros vehículos; atenuación debido a interferencia
electromagnética en la banda de comunicación de los sistemas
ZigBee; y atenuación debido a las inclemencias climatológicas,
principalmente la lluvia.
• Pruebas sobre el posicionamiento y los márgenes de error en el
cálculo de la posición del Terminal de operario con respecto al
terminal de vehículo que nos permita asegurar un margen de
seguridad apropiado. Como se ha indicado en los objetivos del
proyecto se estima suficiente un margen de error de 1m.
• Pruebas de funcionamiento del sistema que permita integrar en
conjunto los dispositivos y su puesta en funcionamiento en un
entorno realista de obra que permita avisar al operario con suficiente
antelación y tenga en cuenta las velocidades de la maquinaria.
Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 12ANEXO FOTOGRÁFICO Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 13
FOTOGRAFÍAS DE DETALLE DE EQUIPOS Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 14
FOTOGRAFÍAS DE PRUEBAS REALIZADAS EN CAMPO Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 15
Diseño y desarrollo de un sistema de detección y alarma anti – atropellos 16
También puede leer