Manual del operador Service Information System
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación
ROBOTICS Manual del operador Service Information System
Trace back information: Workspace 21A version a11 Checked in 2021-03-19 Skribenta version 5.4.005
Manual del operador
Service Information System
RobotWare 6.12
ID de documento: 3HAC050944-005
Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.
Las especificaciones están sujetas a cambios sin previo aviso.La información de este manual puede cambiar sin previo aviso y no puede entenderse
como un compromiso por parte de ABB. ABB no se hace responsable de ningún
error que pueda aparecer en este manual.
Excepto en los casos en que se indica expresamente en este manual, ninguna parte
del mismo debe entenderse como una garantía por parte de ABB por las pérdidas,
lesiones, daños materiales, idoneidad para un fin determinado ni garantías similares.
ABB no será en ningún caso responsable de los daños accidentales o consecuentes
que se produzcan como consecuencia del uso de este manual o de los productos
descritos en el mismo.
Se prohíbe la reproducción o la copia de este manual o cualquiera de sus partes si
no se cuenta con una autorización escrita de ABB.
Guardar para futuras referencias.
Usted puede obtener copias adicionales de este manual a través de ABB.
Traducción del manual original.
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.
Las especificaciones están sujetas a cambios sin previo aviso.Contenido
Contenido
Descripción general de este manual ............................................................................................... 7
1 Introducción al Service Information System 9
1.1 Qué es el Service Information System (SIS) ........................................................... 9
1.2 Contadores del SIS ............................................................................................ 10
1.2.1 Tiempo de calendario ............................................................................... 10
1.2.2 Tiempo de funcionamiento ........................................................................ 12
1.2.3 Caja reductora ........................................................................................ 13
1.2.4 Distancia movida ..................................................................................... 15
2 Ejecución del Sistema de información de servicio 17
2.1 Utilización del SIS ............................................................................................. 17
2.2 Establecimiento de los parámetros del SIS ............................................................ 18
2.3 Puesta a cero de valores .................................................................................... 20
2.4 Lectura de los registros del SIS ........................................................................... 21
2.5 Mensajes de apagado de seguridad ...................................................................... 23
3 Parámetros del sistema 25
3.1 El tipo de SIS Parameters y el tipo de SIS Single Parameters .................................... 25
3.2 Name .............................................................................................................. 26
3.3 Operational Limit (h) .......................................................................................... 27
3.4 Calendar Limit (years) ........................................................................................ 28
3.5 Operational Warning (%) ..................................................................................... 29
3.6 Calendar Warning (%) ........................................................................................ 30
3.7 Gearbox Warning (%) ......................................................................................... 31
3.8 Robot temperature (C), Single temperature (C) ....................................................... 32
3.9 Events as Warnings ........................................................................................... 33
Índice 35
Manual del operador - Service Information System 5
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.Esta página se ha dejado vacía intencionadamente
Descripción general de este manual
Descripción general de este manual
Acerca de este manual
Este manual explica cómo utilizar el Service Information System (SIS).
Utilización
Este manual puede utilizarse durante el uso, la instalación y el mantenimiento del
sistema. Algunos ejemplos son el establecimiento de los intervalos de servicio
técnico durante la instalación o la puesta a cero (0) del parámetro de tiempo en
servicio tras el mantenimiento.
¿A quién va destinado este manual?
Este manual está dirigido a:
• Personal de instalación
• Personal de mantenimiento
• Personal de reparación
Requisitos previos
El lector deberá:
• Estar familiarizado con los robots industriales y su terminología.
• Estar familiarizado con los parámetros del sistema y cómo configurarlos.
Referencias
Referencia ID de documento
Manual del operador - IRC5 con FlexPendant 3HAC050941-005
Manual del operador - RobotStudio 3HAC032104-005
Manual del operador - Solución de problemas de IRC5 3HAC020738-005
Manual de referencia técnica - Instrucciones, funciones y 3HAC050917-005
tipos de datos de RAPID
Manual de referencia técnica - Parámetros del sistema 3HAC050948-005
Revisiones
Revisión Descripción
- Publicado con RobotWare 6.0.
A Publicado con RobotWare 6.02.
• Eliminada la sección 2.4 Exportación de los datos del SIS.
B Publicado con RobotWare 6.10.01.
• Nuevo contador SIS añadido en la sección Distancia movida en la pági-
na 15.
Continúa en la página siguiente
Manual del operador - Service Information System 7
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.Descripción general de este manual
Continuación
Revisión Descripción
C Publicado con RobotWare 6.12.
• Información añadida sobre Evaluación de la flota.
• Se añadió precaución sobre los contadores de restablecimiento.
• Nuevas imágenes y correcciones menores en las secciones Tiempo de
calendario en la página 10, Tiempo de funcionamiento en la página 12,
Caja reductora en la página 13 y Puesta a cero de valores en la pági-
na 20.
8 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.1 Introducción al Service Information System
1.1 Qué es el Service Information System (SIS)
1 Introducción al Service Information System
1.1 Qué es el Service Information System (SIS)
Introducción
Service Information System (SIS) es una función de software del controlador de
robot que simplifica el mantenimiento del sistema de robot. Supervisa el tiempo
y el modo de funcionamiento del robot y avisa al operador en los momentos en
que se ha planificado una actividad de mantenimiento. La planificación del
mantenimiento se realiza mediante el establecimiento de parámetros del sistema
del tipo SIS Parameters. Consulte Parámetros del sistema en la página 25 y
Establecimiento de los parámetros del SIS en la página 18.
Service Information System también supervisa el estado del motor de los robots
de gran tamaño durante las operaciones con carga elevada; consulte Mensajes
de apagado de seguridad en la página 23.
Funciones supervisadas
Están disponibles los contadores siguientes:
Tiempo de calendario
Calendar time se utiliza para los intervalos de servicio del robot, basándose en el
tiempo de calendario.
Tiempo de funcionamiento
Operation time se utiliza para los intervalos de servicio del robot, basándose en
el tiempo de funcionamiento.
Caja reductora
Gearbox se utiliza para estimar el intervalo de servicio (la vida útil restante) de la
caja reductora. Cada caja reductora supervisada tiene un contador de tiempo que
se basa en el desgaste del eje y en la carga de trabajo del robot. El número de
cajas reductoras supervisadas en el robot son distintas en los distintos modelos.
Distancia movida
Moved distance se utiliza para contabilizar la distancia que la unidad mecánica se
ha movido.
Registros de eventos del SIS documentados como avisos en lugar de errores
Los registros de eventos SIS predeterminados se documentan como errores,
aunque también es posible hacer que los registros de eventos del SIS se
documenten como avisos en lugar de errores. La diferencia principal es que los
avisos no pasan a primer plano en el FlexPendant y que presentan un icono
diferente. Esto afectará a los eventos del tiempo de calendario, eventos del tiempo
de producción y eventos de cajas reductoras.
Para obtener más información, consulte Events as Warnings en la página 33.
Manual del operador - Service Information System 9
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.1 Introducción al Service Information System
1.2.1 Tiempo de calendario
1.2 Contadores del SIS
1.2.1 Tiempo de calendario
Descripción
Calendar time se utiliza para los intervalos de servicio del robot, basándose en el
tiempo de calendario. Por ejemplo, este temporizador puede utilizarse para
programar el momento en el que debe cambiarse el aceite. Esta información está
disponible en el calendario de mantenimiento del robot.
Cuando se alcanza el límite de tiempo de calendario de la operación de
mantenimiento, se registra un mensaje en el registro de eventos. La forma de
acceder al registro de eventos se detalla en la sección Lectura de los registros del
SIS en la página 21.
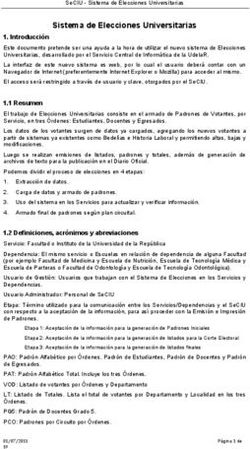
Componentes
La siguiente información está disponible sobre el tiempo de calendario en la rutina
de servicio ServiceInfo.
xx2100000428
Información de servi- Descripción
cio
Servicio anterior Muestra la fecha en que se restableció el contador por última vez,
es decir, la fecha del último servicio.
Tiempo transcurrido Muestra el número de días que han transcurrido desde que el con-
tador se restableció la última vez.
Servicio siguiente Muestra la fecha del siguiente servicio programado.
Continúa en la página siguiente
10 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.1 Introducción al Service Information System
1.2.1 Tiempo de calendario
Continuación
Información de servi- Descripción
cio
Tiempo restante Muestra el número de días que restan hasta el siguiente servicio
programado.
Manual del operador - Service Information System 11
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.1 Introducción al Service Information System
1.2.2 Tiempo de funcionamiento
1.2.2 Tiempo de funcionamiento
Descripción
Operation time se utiliza para los intervalos de servicio del robot, basándose en
el tiempo de funcionamiento. Operation time utiliza el tiempo que ha permanecido
activa la señal MOTORS ON (motores encendidos) con los frenos liberados. Por
ejemplo, este temporizador puede utilizarse para programar el momento en que
debe cambiarse el aceite. Esta información está disponible en el calendario de
mantenimiento del robot.
Cuando se alcanza el límite de tiempo de funcionamiento de la operación de
mantenimiento, se registra un mensaje en el registro de eventos. La forma de
consultarlo se detalla en la sección Lectura de los registros del SIS en la página 21.
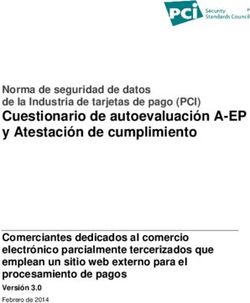
Componentes
La siguiente información está disponible sobre el tiempo de funcionamiento en la
rutina de servicio ServiceInfo.
xx2100000429
Información de servi- Descripción
cio
Intervalo de servicio Muestra el intervalo de servicio especificado en horas.
Tiempo transcurrido Muestra el tiempo, en horas y minutos, que ha transcurrido desde
que se estableció el intervalo de servicio la última vez.
Tiempo restante Muestra el tiempo de funcionamiento, en horas y minutos, que resta
hasta que haya expirado el intervalo de servicio.
12 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.1 Introducción al Service Information System
1.2.3 Caja reductora
1.2.3 Caja reductora
Descripción
Gearbox se utiliza para estimar el intervalo de servicio (la vida útil restante) de la
caja reductora. La estimación se basa en el par y la velocidad (rpm) utilizados.
Esta información puede usarse como guía para la planificación de la sustitución
de la caja reductora.
Cuando se alcanza la vida útil estimada de las cajas reductoras, se registra un
mensaje en el registro de eventos. La forma de consultarlo se detalla en la sección
Lectura de los registros del SIS en la página 21.
Nota
El intervalo máximo de servicio estimado es de 40.000 horas.
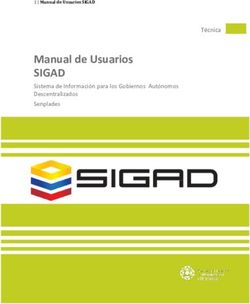
Componentes
La rutina de servicio ServiceInfo dispone de la información enumerada a
continuación acerca del estado de la caja reductora.
xx2100000430
Información de servi- Descripción
cio
Eje x OK El parámetro de tiempo calculado automáticamente para el eje en
cuestión no se ha superado.
Eje x NOK Se ha alcanzado el intervalo de servicio técnico del eje correspon-
diente.
Continúa en la página siguiente
Manual del operador - Service Information System 13
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.1 Introducción al Service Information System
1.2.3 Caja reductora
Continuación
Información de servi- Descripción
cio
Eje x N/D No hay disponible ningún cálculo del parámetro de tiempo de servicio
para el eje en cuestión.
Nota
Esta información se muestra cuando no hay ninguna supervisión
en la caja reductora x.
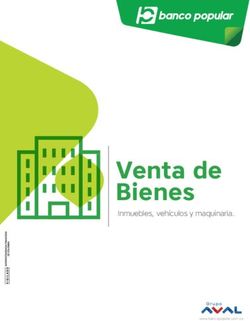
La rutina de servicio ServiceInfo dispone de la información enumerada a
continuación acerca del tiempo de la caja reductora.
xx2100000431
Información de servi- Descripción
cio
Tiempo consumido Muestra el tiempo consumido como un porcentaje del tiempo total.
Tiempo transcurrido Muestra el tiempo de funcionamiento, en horas, que ha transcurrido
para el eje x desde que comenzó la medición.
Tiempo restante Muestra el tiempo restante, en horas, para el eje x hasta el momento
previsto de sustitución de la caja reductora.
¡CUIDADO!
Contadores definidos incorrectamente o restablecidos pueden dar lugar a la
visualización de información errónea.
14 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.1 Introducción al Service Information System
1.2.4 Distancia movida
1.2.4 Distancia movida
Descripción
Moved distance se utiliza para contabilizar la distancia que la unidad mecánica se
ha movido. Esta función solo está disponible para ejes sencillos y ejes adicionales.
Moved distance se muestra en los datos generales del SIS en el Navegador de
dispositivos en Robotstudio e Información del sistema en FlexPendant.
Valores
El valor en Moved distance se muestra en metros o revoluciones, dependiendo
del tipo de unidad mecánica conectada:
Tipo de unidad mecá- Valor mostrado
nica
Track Motion lineal Metro
Pistola servo Metro
Eje de rotación Revolución
Nota
Para unidades mecánicas no admitidas, el valor mostrado será 0.
Nota
El valor no puede restablecerse a través de las rutinas de servicio.
Manual del operador - Service Information System 15
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.Esta página se ha dejado vacía intencionadamente
2 Ejecución del Sistema de información de servicio
2.1 Utilización del SIS
2 Ejecución del Sistema de información de servicio
2.1 Utilización del SIS
Introducción
A continuación encontrará una breve descripción sobre cómo usar Service
Information System (SIS).
Utilización del sistema SIS
Utilice este procedimiento para ejecutar el sistema SIS.
Acción Referencia
1 Determine qué funciones del SIS usará. Consulte Tiempo de calendario en la
página 10, Tiempo de funcionamiento
en la página 12 y Caja reductora en la
página 13.
2 Defina qué valores son adecuados y pertinen- Las recomendaciones sobre la vida
tes para su aplicación y su entorno de produc- útil esperada de los componentes y
ción. los intervalos de servicio se describen
en el Manual del producto, sección
Mantenimiento.
3 Introduzca estos parámetros en la configura- Consulte Establecimiento de los pará-
ción de parámetros del sistema. metros del SIS en la página 18.
4 Haga funcionar el robot con su modo de funcio-
namiento normal.
5 Ponga a cero el contador si se ha realizado Consulte Puesta a cero de valores en
una reparación o si, por algún otro motivo, se la página 20.
ha reiniciado algún contador.
¡CUIDADO!
El restablecimiento de los contadores no se
puede deshacer.
6 Cuando se sobrepasa un límite de tiempo, se Consulte Lectura de los registros del
registra un mensaje en el registro de eventos. SIS en la página 21.
7 Si el registro que contiene el mensaje debe
estar disponible en un PC externo o si se desea
introducir los parámetros del SIS a través de
un PC externo, existe un conjunto de herramien-
tas de software que permiten construir una
aplicación de este tipo.
8 Es posible programar algunos robots (por Consulte Mensajes de apagado de
ejemplo los modelos IRB 4600, IRB 6640 y IRB seguridad en la página 23.
7600) para que generen avisos si los motores
se sobrecalientan y necesitan enfriarse.
Manual del operador - Service Information System 17
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.2 Ejecución del Sistema de información de servicio
2.2 Establecimiento de los parámetros del SIS
2.2 Establecimiento de los parámetros del SIS
Introducción
Para usar correctamente el sistema SIS, es necesario establecer varios parámetros
del sistema. Estos valores pueden basarse en el programa de mantenimiento del
robot, pero deben ser adaptados por la organización usuaria del sistema a medida
que se va acumulando el conocimiento sobre las condiciones de trabajo de los
robots.
Dado que los avisos deben ser utilizados para los fines definidos por el usuario,
ABB no puede ofrecer recomendaciones sobre estas definiciones.
Establecimiento de los parámetros del SIS
Utilice este procedimiento para establecer los parámetros de sistema del SIS.
Acción Referencia
1 Abra la configuración de parámetros del Encontrará información detallada en Ma-
sistema en el FlexPendant (Panel de con- nual del operador - IRC5 con FlexPendant
trol) o en RobotStudio (Editor de configu- y Manual del operador - RobotStudio.
ración).
2 Seleccione el tema Motion y a continua-
ción el tipo SIS Parameters o SIS Single
Parameters.
3 Seleccione la instancia que desea definir Encontrará descripciones detalladas en el
y edite los parámetros del sistema. capítulo Parámetros del sistema en la pá-
gina 25.
Ejemplos
Estos ejemplos muestran la forma de configurar los parámetros de sistema.
Operational Limit (h)
Si se cambia el valor de este parámetro a 2000, el SIS alertará al usuario tras 2.000
horas en el modo de funcionamiento.
Operational Warning (%)
Si se cambia el valor de este parámetro a 90, el SIS alertará al usuario tras 1.800
horas en el modo de funcionamiento. La cantidad total de horas se calcula como
porcentaje del valor del parámetro Operational Limit (h).
2000*0.9=1800
Calendar Limit (años)
Si se cambia el valor de este parámetro a 2, el SIS alertará al usuario tras 2 años.
Calendar Warning (%)
Si se cambia el valor de este parámetro a 50, el SIS alertará al usuario tras 1 año.
La cantidad total de años se calcula como porcentaje del valor del parámetro
Calendar Limit (years).
2*0.5=1
Continúa en la página siguiente
18 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.2 Ejecución del Sistema de información de servicio
2.2 Establecimiento de los parámetros del SIS
Continuación
Gearbox warning (%)
Si se cambia el valor de este parámetro a 90, el SIS alertará al usuario una vez
transcurrido el 90% del intervalo de servicio esperado para cada caja reductora.
El sistema de robot detecta y registra automáticamente todas las variables
necesarias para calcular el intervalo de servicio esperado para cada caja reductora.
Esto se hace mediante la extrapolación de datos de funcionamiento anteriores en
función del tiempo, a partir de una fórmula que incorpora los factores siguientes:
• Pares de entrada y salida
• Velocidad del eje de la caja reductora
• Temperatura ambiente.
• Otras variables
Robot temperature (C) / Single temperature (C)
Este parámetro define la temperatura ambiente utilizada para estimar la vida útil
restante de la caja reductora.
Manual del operador - Service Information System 19
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.2 Ejecución del Sistema de información de servicio
2.3 Puesta a cero de valores
2.3 Puesta a cero de valores
Restablecimiento de valores
Es posible poner a cero los contadores en cualquier momento ejecutando la rutina
de servicio ServiceInfo desde el FlexPendant. Consulte Manual del operador - IRC5
con FlexPendant.
¡CUIDADO!
El restablecimiento de los contadores no se puede deshacer.
Acción
1 Inicie el Editor de programas.
2 Toque Depurar y a continuación toque Llamar rutina.
3 Toque ServiceInfo para iniciar la rutina de servicio.
4 Si hay más de un robot, toque ROB_x para seleccionar el robot.
5 En la ventana principal de rutina de servicio, seleccione el contador que se va a res-
tablecer (1 = Tiempo de calendario, 2 = Tiempo de funcionamiento y 3 = Caja reducto-
ra).
xx2100000427
6 En la ventana de contador seleccionada, pulse Reset (restablecer).
20 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.2 Ejecución del Sistema de información de servicio
2.4 Lectura de los registros del SIS
2.4 Lectura de los registros del SIS
Introducción
Cuando se ha alcanzado un valor de contador determinado (por ejemplo el máximo
tiempo de funcionamiento permitido antes del servicio), aparece un mensaje en
el registro de eventos.
Apertura de los registros
El registro de eventos puede verse en línea desde el FlexPendant y RobotStudio.
Encontrará una descripción en Manual del operador - IRC5 con FlexPendant y
Manual del operador - RobotStudio. Consulte también Manual del
operador - Solución de problemas de IRC5.
En RobotStudio, utilice la función Evaluación de la flota para extraer datos SIS
que ABB pueda utilizar en una investigación posterior, si fuera necesario.
Tiempo en servicio
El tiempo total en servicio puede consultarse en el FlexPendant.
En el menú ABB, toque Info Sistema y a continuación toque para ampliar
Dispositivos de hardware y continúe por Unidades mecánicas y ROB_1 hasta
Datos generales del SIS.
Intervalo de servicio excedido
Si el intervalo de servicio ha rebasado el valor definido, aparece un mensaje de
error (“¡Intervalo de servicio excedido!”).
Sin datos disponibles
Si no hay ningún dato disponible para el valor definido, aparece un mensaje (“¡Sin
datos disponibles!") al intentar mostrar los datos.
Mensajes disponibles
Pueden aparecer los mensajes siguientes:
Contador Mensaje del registro del Descripción
SIS
Tiempo de calenda- Mensaje de servicio: X días Quedan X días naturales hasta que
rio naturales hasta el siguiente transcurra el límite de tiempo de calenda-
servicio. rio establecido manualmente. La forma
de establecer el límite se detalla en la
sección Establecimiento de los paráme-
tros del SIS en la página 18.
Tiempo de calenda- Mensaje de servicio: ¡Servi- Se ha alcanzado el límite de tiempo de
rio cio pendiente! X días natu- calendario establecido manualmente. La
rales desde el último servi- forma de establecer el límite se detalla
cio. en la sección Establecimiento de los pa-
rámetros del SIS en la página 18.
Realice las operaciones de servicio técni-
co necesarias, detalladas en el Manual
del producto.
Continúa en la página siguiente
Manual del operador - Service Information System 21
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.2 Ejecución del Sistema de información de servicio
2.4 Lectura de los registros del SIS
Continuación
Contador Mensaje del registro del Descripción
SIS
Tiempo de funciona- Mensaje de servicio: Quedan X horas de funcionamiento hasta
miento X horas operacionales que transcurra el límite de tiempo de
hasta el servicio siguiente. funcionamiento establecido manualmen-
te. La forma de establecer el límite se
detalla en la sección Establecimiento de
los parámetros del SIS en la página 18.
Tiempo de funciona- Mensaje de servicio: ¡Servi- Se ha alcanzado el límite de tiempo de
miento cio pendiente! X horas funcionamiento establecido manualmen-
operacionales desde el últi- te. La forma de establecer el límite se
mo servicio. detalla en la sección Establecimiento de
los parámetros del SIS en la página 18.
Realice las operaciones de servicio técni-
co necesarias, detalladas en el Manual
del producto.
Tiempo de la caja Mensaje de servicio: Queda un X% de horas de una caja reduc-
reductora X% del intervalo de servicio tora hasta que transcurra el límite de vida
ha terminado para transmi- útil calculado para la caja reductora. La
sión x! forma de establecer el límite se detalla
en Establecimiento de los parámetros del
SIS en la página 18.
Tiempo de la caja Mensaje de servicio: ¡La Ha transcurrido el límite de vida útil cal-
reductora transmisión x necesita ser- culado para una caja reductora.
vicio! Realice las operaciones de servicio técni-
co necesarias, detalladas en el Manual
del producto.
22 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.2 Ejecución del Sistema de información de servicio
2.5 Mensajes de apagado de seguridad
2.5 Mensajes de apagado de seguridad
Aviso de factor de carga
La función de apagado de seguridad es un aviso y un mensaje de error que se
utilizan para proteger a los robots de gran tamaño (por ejemplo el IRB 4600 y el
IRB 6640) de daños en los motores o las cajas reductoras durante las operaciones
con cargas elevadas. El aviso/error se titula 50263 Aviso de factor de carga.
Utilización
Si un robot trabaja a alta velocidad con cargas pesadas y durante periodos
prolongados, sus motores y las cajas reductoras se calientan. Al dejar que los
motores y las cajas reductoras se enfríen cada cierto tiempo, se pueden prevenir
daños en ellos.
El límite de la intensidad con la que pueden funcionar los motores y las cajas
reductoras depende del par, las revoluciones y también la temperatura ambiente.
Esto puede simularse para una instalación con el complemento de RobotStudio
Gearbox Heat Prediction Tool. Esta herramienta no requiere una licencia premium.
Si existe el riesgo de que los motores o las cajas reductoras se sobrecalienten, el
sistema avisará de que es necesario dejar que el robot se enfríe. Se envía un
mensaje de aviso al registro y tras 30 minutos se envía otro mensaje de error. Es
posible utilizar un gestor de errores para tomar las medidas adecuadas, por ejemplo
apagar equipos externos y sacar el robot del área de trabajo.
Si el aviso (50263 Aviso de factor de carga) aparece con frecuencia pero se
comprueba que los motores y las cajas reductoras no están sobrecalentados, es
posible cambiar el valor del parámetro de sistema que define la temperatura
ambiente (Robot temperature (C) o Single temperature (C)) para reducir la aparición
de este problema.
¡CUIDADO!
Si se hace caso omiso al error sin dejar que el motor o la caja reductora se
enfríen, es posible que la vida útil de estos elementos se reduzca.
Ejemplos
A continuación aparecen ejemplos de los gestores de errores que pueden utilizarse.
Se utiliza IError para solicitar y activar una interrupción cuando se produce un
error. Dentro de la función TRAP se programa qué acciones deben tener lugar
antes del apagado del sistema.
Aviso
TRAP trap_name_warn
! Your actions
END TRAP
..
..
PROC main()
CONNECT errorint WITH trap_name_warn;
IError MOTION_ERR\Error Id := 263, TYPE_WARN, errorint;
Continúa en la página siguiente
Manual del operador - Service Information System 23
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.2 Ejecución del Sistema de información de servicio
2.5 Mensajes de apagado de seguridad
Continuación
..
..
END main
Error
TRAP trap_name_error
! Your actions
END TRAP
..
..
PROC main()
CONNECT errorint WITH trap_name_error;
IError MOTION_ERR\Error Id := 263, TYPE_ERR, errorint;
..
..
END main
Información relacionada
Para obtener más información Consulte
sobre
IError Manual de referencia técnica - Instrucciones, funciones
y tipos de datos de RAPID
TRAP Manual de referencia técnica - Instrucciones, funciones
y tipos de datos de RAPID
StopMove Manual de referencia técnica - Instrucciones, funciones
y tipos de datos de RAPID
StorePath Manual de referencia técnica - Instrucciones, funciones
y tipos de datos de RAPID
Robot temperature (C) y Single Robot temperature (C), Single temperature (C) en la
temperature (C) página 32
Gearbox Heat Predition Tool Manual del operador - RobotStudio
24 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.3 Parámetros del sistema
3.1 El tipo de SIS Parameters y el tipo de SIS Single Parameters
3 Parámetros del sistema
3.1 El tipo de SIS Parameters y el tipo de SIS Single Parameters
Descripción general
Esta sección describe los tipos SIS Parameters y SIS Single Parameters que
pertenecen al tema Motion. Cada parámetro de estos tipos se describe en un tema
de información separado en esta sección.
Descripción del tipo
El tipo SIS Parameters describe los intervalos de servicio y niveles de aviso del
robot. El intervalo de servicio puede definirse tanto en tiempo de producción como
en tiempo de calendario.
El tipo SIS Single Parameters describe los intervalos de servicio y niveles de aviso
de los ejes externos. El intervalo de servicio puede definirse tanto en tiempo de
producción como en tiempo de calendario.
Los parámetros de los tipos SIS Parameters y SIS Single Parameters son idénticos
en cuanto a su uso y sus valores permitidos. Por tanto, se describen conjuntamente
en este manual.
Limitaciones
El cambio de los valores de los parámetros de SIS Single Parameters sólo resulta
útil si tiene uno o varios ejes externos.
Información relacionada
Consulte el manual de producto del robot.
Manual del operador - Service Information System 25
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.3 Parámetros del sistema
3.2 Name
3.2 Name
Objeto superior
Name pertenece al tipo SIS Parameters del tema Motion.
Descripción
Name define el nombre del parámetro de SIS.
Valores permitidos
Una cadena con un máximo de 32 caracteres.
26 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.3 Parámetros del sistema
3.3 Operational Limit (h)
3.3 Operational Limit (h)
Objeto superior
Operational Limit (h) pertenece al tipo SIS Parameters del tema Motion.
Descripción
Operational Limit (h) describe el intervalo de servicio, medido en tiempo de
producción.
Utilización
El intervalo de servicio por tiempo de producción, Operational Limit (h), de los
robots ABB suele estar establecido en el momento de la entrega y sólo debe
cambiarse si el valor difiere del calendario de mantenimiento del manual del
producto correspondiente.
Cuando se alcanza el límite de Operational Limit (h), el FlexPendant muestra un
mensaje en el registro de errores.
Si Operational Limit (h) tiene el valor 0, esta función se desactiva.
Valores permitidos
Un valor de entre 0 y 50000 horas.
Manual del operador - Service Information System 27
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.3 Parámetros del sistema
3.4 Calendar Limit (years)
3.4 Calendar Limit (years)
Objeto superior
Calendar Limit (years) pertenece al tipo SIS Parameters del tema Motion.
Descripción
Calendar Limit (years) define el intervalo de servicio, medido en tiempo de
calendario.
Utilización
El intervalo de servicio por tiempo de calendario, Calendar Limit (years), de los
robots ABB suele estar establecido en el momento de la entrega y sólo debe
cambiarse si el valor difiere del calendario de mantenimiento del manual del
producto correspondiente.
Cuando se alcanza el límite de Calendar Limit (years), el FlexPendant muestra un
mensaje en el registro de errores.
Si Calendar Limit (years) tiene el valor 0, esta función se desactiva.
Valores permitidos
Un valor entre 0 y 20 años.
28 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.3 Parámetros del sistema
3.5 Operational Warning (%)
3.5 Operational Warning (%)
Objeto superior
Operational Warning (%) pertenece al tipo SIS Parameters del tema Motion.
Descripción
Operational Warning (%) define con cuánta antelación debe producirse el aviso
de nivel de servicio basado en el tiempo de producción.
Utilización
El valor de Operational Warning (%) es un porcentaje del valor de Operational
Limit (h). Un número más alto proporciona un tiempo más breve entre el aviso y
el nivel de servicio alcanzado.
Si Operational Warning (%) tiene el valor 0, el aviso se desactiva.
Valores permitidos
Un valor entre 0 y 100 %.
Información relacionada
Operational Limit (h) en la página 27.
Manual del operador - Service Information System 29
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.3 Parámetros del sistema
3.6 Calendar Warning (%)
3.6 Calendar Warning (%)
Objeto superior
Calendar Warning (%) pertenece al tipo SIS Parameters del tema Motion.
Descripción
Calendar Warning (%) define con cuánta antelación debe producirse el aviso de
nivel de servicio basado en el tiempo de producción.
Utilización
El valor de Calendar Warning (%) es un porcentaje del valor de Calendar Limit
(years). Un número más alto proporciona un tiempo más breve entre el aviso y el
nivel de servicio alcanzado.
Si Calendar Warning (%) tiene el valor 0, el aviso se desactiva.
Valores permitidos
Un valor entre 0 y 100 %.
Información relacionada
Calendar Limit (years) en la página 28.
30 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.3 Parámetros del sistema
3.7 Gearbox Warning (%)
3.7 Gearbox Warning (%)
Objeto superior
Gearbox Warning (%) pertenece al tipo SIS Parameters del tema Motion.
Descripción
Gearbox Warning (%) define con cuánta antelación debe producirse el aviso de
nivel de servicio alcanzado para la caja reductora.
Utilización
El intervalo de servicio estimado de las cajas reductoras (la vida útil restante) se
calcula automáticamente. El valor de Gearbox Warning (%) es un porcentaje del
intervalo de servicio estimado de la caja reductora. Un número más alto proporciona
un tiempo más breve entre el aviso y el nivel de servicio alcanzado.
En el caso de un robot de ABB que utiliza el SIS, suele tener definido el valor 100.
Si Gearbox Warning (%) tiene el valor 0, el aviso se desactiva.
Valores permitidos
Un valor entre 0 y 100 %.
Manual del operador - Service Information System 31
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.3 Parámetros del sistema
3.8 Robot temperature (C), Single temperature (C)
3.8 Robot temperature (C), Single temperature (C)
Objeto superior
Robot temperature (C) y Single temperature (C) pertenecen al tipo SIS Parameters,
en el tema Motion.
Descripción
Robot temperature (C) y Single temperature (C) definen la temperatura ambiente
(°C).
Utilización
El intervalo de servicio de las cajas reductoras (la vida útil restante) se calcula
automáticamente, utilizando entre otros valores los de Robot temperature (C) o
Single temperature (C). En el caso de un robot de ABB que utiliza el SIS, suele
tener definido el valor 50 y debe cambiarse si el valor difiere del valor definido en
el manual del producto.
El valor de temperatura puede cambiarse a la temperatura real del emplazamiento
en el que se usa el robot.
Valores permitidos
Un valor entre 35 y 50.
Si se define un valor menor que 35, entonces se utilizará 35.
32 Manual del operador - Service Information System
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.3 Parámetros del sistema
3.9 Events as Warnings
3.9 Events as Warnings
Objeto superior
Events as Warnings pertenece al tipo SIS Parameters del tema Motion.
Descripción
Events as Warnings define si los registros de eventos del SIS deben ser avisos
en lugar de errores.
Utilización
Cámbielo a Yes si desea que se informe de los registros de eventos del SIS como
avisos en lugar de errores. La diferencia principal es que los avisos no pasan a
primer plano en la interfaz del FlexPendant y que presentan un icono diferente.
Esto afectará a los eventos del tiempo de calendario, eventos del tiempo de
producción y eventos de cajas reductoras.
Valores permitidos
Yes o No.
Manual del operador - Service Information System 33
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.Esta página se ha dejado vacía intencionadamente
Índice
Índice mensajes del registro de eventos, 21
O
A operational limit, 18
abrir los registros de eventos, 21 operational warning, 18
apagado de seguridad, 23
Aviso de factor de carga, 23 P
avisos, 23 parámetros, 18
axis service status, 14 parámetros de sistema, 18
paso a paso, 17
C procedimientos iniciales, 17
calendar limit, 18
calendar warning, 18 R
carga elevada, 23 registro de eventos, 21
consumed time, gearbox service, 14 remaining time, gearbox service, 14
contador de caja reductora, 13 reset values, 20
contador de operaciones, 12
contador de tiempo en servicio, 21 S
contadores de motores encendidos, 12 ServiceInfo, 20
service routine, ServiceInfo, 20
E servicio anterior, tiempo de calendario, 10
elapsed time, gearbox service, 14 servicio siguiente, tiempo de calendario, 10
Eventos como avisos, 9 sin datos, 21
SIS, overview, 9
F SIS Parameters, 9, 17–18, 21–22
fecha, 10 SIS Parameters, tipo, 25
SIS Single Parameters, 9, 17–18, 21–22
G SIS Single Parameters, tipo, 25
gearbox warning, 19
start service routine, 20
I T
intervalo de servicio, tiempo de funcionamiento, 12
tiempo de calendario, 10
intervalo excedido, 21
tiempo restante, tiempo de calendario, 11
J tiempo restante, tiempo de funcionamiento, 12
joint service, 13 tiempo transcurrido, tiempo de calendario, 10
tiempo transcurrido, tiempo de funcionamiento, 12
L
lectura de registros de eventos, 21 U
utilización del SIS, 17
M
mensajes de error, 23
Manual del operador - Service Information System 35
3HAC050944-005 Revisión: C
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.ABB AB
Robotics & Discrete Automation
S-721 68 VÄSTERÅS, Sweden
Telephone +46 (0) 21 344 400
ABB AS
Robotics & Discrete Automation
Nordlysvegen 7, N-4340 BRYNE, Norway
Box 265, N-4349 BRYNE, Norway
Telephone: +47 22 87 2000
ABB Engineering (Shanghai) Ltd.
Robotics & Discrete Automation
No. 4528 Kangxin Highway
PuDong District
SHANGHAI 201319, China
Telephone: +86 21 6105 6666
ABB Inc.
Robotics & Discrete Automation
1250 Brown Road
Auburn Hills, MI 48326
USA
Telephone: +1 248 391 9000
abb.com/robotics
3HAC050944-005, Rev C, es
© Copyright 2005, 2008-2021 ABB. Reservados todos los derechos.
Las especificaciones están sujetas a cambios sin previo aviso.También puede leer