Elección de la interface de visión para Autocolimador Nikon 6D.
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

Elección de la interface de visión para
Autocolimador Nikon 6D.
Dra. Georgina Flesia*1 ,Dr. Clemar Schurrer 2#, Ing. Guillermo Bergues#3,
#
CIII, Universidad Tecnológica Nacional, *FAMAF
2
cschurrer@gmail.com
3
gjbergues@gmail.com
1
flesia@famaf.unc.edu.ar
Resumen— Este documento tiene el objetivo de describir el Un autocolimador, Fig. 2, es un instrumento óptico
procedimiento para determinar lentes, cámara CCD, y partes utilizado para medición de pequeños desplazamientos
posicionales con prestaciones mínimas para colocar como angulares de una superficie. Tiene la característica de poder
interface visual en un Autocolimador del tipo Nikon 6B/6D. Una medir sin hacer contacto directo con la misma, usando la luz
elección estudiada permite la derivación de errores en
para medir ángulos. Éste opera proyectando luz hecha paralela
coordenadas en los métodos de procesamiento de la imagen
resultante. Se discute también un método detección de líneas (colimada, ver Fig 1) a través de un objetivo sobre un objeto
basado en la trasformada Hough, y el detector de bordes de con una superficie refractiva.
Canny.
Keywords— Autolimador, cámara CCD, interfase visual,
procesamiento de imagen.
I. INTRODUCCIÓN
Un autocolimador es un instrumento óptico para medir
ángulos sin contacto. Se pueden usar para detectar y visualizar
bordes microscópicos habilitando la medición de las Fig. 1 Un ejemplo de un colimador óptico con una lámpara, una
desviaciones angulares desde el paralelismo, diferentes planos apertura(B), y una lente positiva (L). El autocolimador tiene un colimador y
un prisma que refleja la luz colimada hacia la retícula de visión.
de un objeto y perpendicularidad.
La medición en el Autocolimador Nikon 6D es realizada
por un operario mediante el posicionamiento de uno de sus
ojos en el visor del instrumento. Este tipo de medición
introduce errores del tipo aleatorio y sistemático debido a la
presencia del paralaje propio del método utilizado y defectos
del ojo del operador. Para reducir este tipo de incertidumbres
es preciso cambiar el método de captación de los datos.
Una de las principales herramientas disponibles en la
actualidad que permite mejorar este tipo de instrumentos es
“la visión por computador”. Con este término se refiere a una
interface compuesta de una mesa especial que permite
alineación en tres direcciones, una cámara digital de alta
resolución instalada sobre dicha mesa, y una computadora
conectada a la cámara que recibe las imágenes y las procesa, Fig. 2 Ejemplo de un autocolimador óptico donde se nota la retícula donde
para obtener las mediciones finales. se observa el desvío de la luz colimada.
En este trabajo describimos la elección de los elementos
que van a configurar el sistema, y un estudio preliminar de los Si la superficie es perpendicular a la luz proyectada, el haz
algoritmos de procesamiento necesarios para dar el resultado es reflejado de vuelta a su punto de origen. Sin embargo, si la
final. superficie esta inclinada relativa al eje óptico del
Describiremos los estudios realizados para poder elegir qué autocolimador, la luz reflejada se desplaza (visualizado
tipo de cámara es necesario utilizar, dado que una elección contra la cuadrícula – usualmente una línea en cruz, ver Fig.
estudiada permite la derivación de errores en coordenadas en 3). Cualquier desviación entre la luz proyectada y el haz
los métodos de procesamiento de la imagen resultante. reflejado se mide contra la escala en arco-segundos.
II. AUTOCOLIMADOR.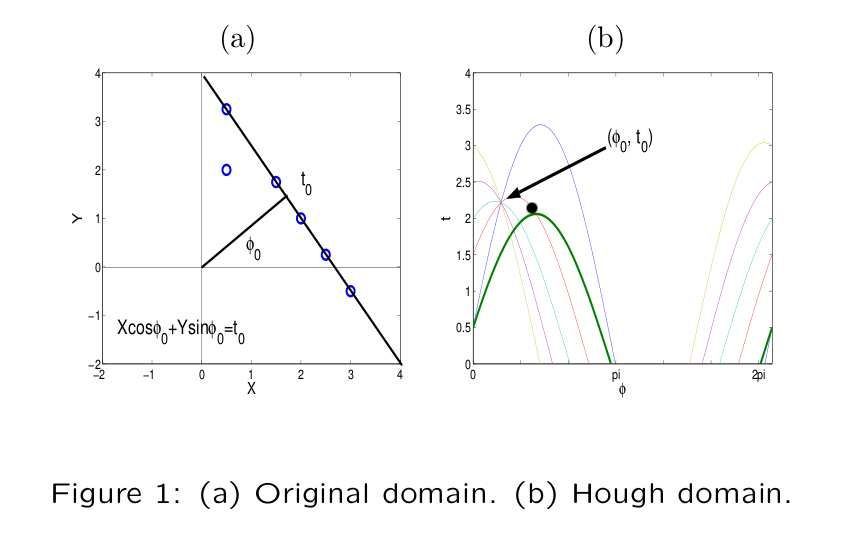
Fig. 3 Esquema de cruces visibles en el Autocolimador Nikon 6D. La cruz Fig. 5 Metric Lab Jack.
negra es una regla graduada vertical y horizontalmente es la de referencia,
mientras que la roja permite determinar el desplazamiento angular en la
dirección vertical y horizontal.
• Una base rotacional cuya función es girar, en un eje
vertical como centro de giro, la cámara y por ende
En la Fig.4 podemos ver el Autocolimador Nikon 6D, el eje del lente. (Fig. 6).
perteneciente al laboratorio CEMETRO de la Universidad
Tecnológica Nacional Regional Córdoba. El autocolimador
está dispuesto en una mesa particular de modo de asegurar las
condiciones de nivelación y alineación a lo largo de la
experiencia.
Fig. 6 Base rotacional.
• Un Goniómetro métrico que permitirá variar el
ángulo de la horizontal. Cabe destacar que cuanto
mayor sea el desplazamiento que tenga el
dispositivo más será la capacidad del sistema en
general de llegar al punto óptimo de enfoque y de
apertura angular requerido (Fig. 7).
Fig. 4 Autocolimador Nikon 6D
III. DESCRIPCIÓN DEL SISTEMA DE INTERFACE
A. Mesa de trabajo del autocolimador.
Este tipo de instrumentos son de alta precisión por lo cual
es necesario que la mesa de trabajo del mismo sea fija, sin
ningún tipo de grado de libertad en sus movimientos. Esto Fig. 7. Goniómetro métrico.
permitirá realizar las operaciones de acuerdo a las
especificaciones dadas por el fabricante. • Para poder variar la posición horizontal lineal en dos
direcciones x e y se necesita el dispositivo
B. Mesa de trabajo de la interface. mostrado en la Fig. 8 denominado trasladador
lineal de dos etapas.
La interface debe tener un sistema de soporte que provea un
sistema de referencia robusto. Los accesorios necesarios son
los siguientes:
• Un “metric lab jack”, que permite posicionar la
cámara variando la posición vertical en pasos muy
pequeños y precisos (Fig. 5).
Fig. 5 Trasladador lineal de dos etapas.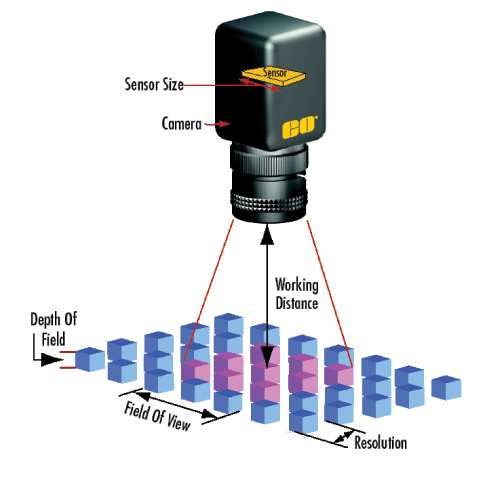
C. Captura imagen generada por el autocolimador Resolution (resolución): es la mejor característica que se
puede resolver de un objeto, y refiere al tamaño final del pixel
La pieza final de la interface es una cámara digital que de la imagen generada.
permita captar la cuadrícula del autocolimador (que no es una
pantalla sino un visor). La cámara se ubica frente al ocular del Working distance (distancia de trabajo): se mide desde
autocolimador, en la posición del ojo del operario y la imagen el frente del objetivo del lente hasta el objeto.
digital tomada de las cruces formadas por el autocolimador al
medir un objeto deberían ser segmentadas con la misma Sensor Size (Tamaño del sensor): parámetro importante a
precisión que el aparato original. La cruz negra de referencia la hora de elegir que cámara se va a utilizar ya que junto a la
es en realidad una regla graduada mientras que la roja es en distancia focal del objetivo define la apertura angular de la
realidad una cruz de luz muy fina. Ver Fig. 3. cámara.
Para que la imagen obtenida tenga capacidades Angular Aperture (Apertura Angular): La apertura
metrológicas, la pantalla del autocolimador debe entrar angular de una lente es el ángulo aparente de la apertura de la
completa en la imagen, por lo cual es necesario tener una lente visto desde el punto focal.
apertura angular en la cámara capaz de capturar toda la
cuadrícula. Dicha apertura angular es un parámetro a estimar θ=2arctan(A/2f)
antes de elegir la cámara a comprar. Las cámaras para
aplicaciones científicas tienen especificaciones detalladas, donde f es la distancia focal y A el diámetro de la apertura.
pero en nuestro caso, no podemos realizar la elección hasta
saber cuál es la apertura angular mínima necesaria para
I. Medición de la distancia focal de la webcam.
obtener una imagen enfocada de toda cuadrícula del
autocolimador.
Como se muestra la Fig. 8, la distancia focal de la cámara
IV. DETERMINACIÓN DE LAS PRESTACIONES MÍNIMAS DE LA es la distancia entre el lente y la pantalla, medida sobre el área
CÁMARA más pequeña posible.
Para calcular la apertura angular necesaria en la cámara, se Se estudió esta distancia en la cámara web desarmándola, y
implementó una interface simple con una webcam con un retirando la lente, para trabajarla como una lupa. Utilizando el
chip CMOS cómo sensor, y realizaron varias experiencias sol como fuente de luz al infinito se buscó el punto de
para comprender las bases y fundamentos de la óptica de concentración del haz formado en la pantalla. Luego se estimó
la cámara, al no tener especificaciones técnicas detalladas. la posición del centro óptico de la lente del objetivo de la
En la Fig. 7 podemos visualizar los parámetros principales cámara desarmada, y se midió el foco, es decir la distancia
de las cámaras CCD estándar que utilizaremos. Es entre ambos puntos, con un calibre.
necesario mencionar que cuando decimos“cámara CCD
” nos referimos tanto al cuerpo (que posee el sensor y la
electrónica asociada) como al objetivo.
Fig. 1 Esquema de la medición del foco de la cámara web.
Para estimar la apertura angular de la cámara a partir del
foco es necesario medir también el tamaño del sensor , lo cual
no fue posible dada la sensibilidad de este componente.
tg(θ)=d/2f
Por lo cual hubo que realizar más experiencias.
Fig. 7 Parámetros de la cámara.
II. Análisis de la formación de la imagen virtual del
autocolimador.
Field of View (Campo de visión): Es una función del
objetivo que posee la cámara y del tamaño del sensor, y Como no se pudo calcular la apertura angular con los
refiere a cuánto de un objeto se puede detectar. Depende del parámetros de la webcam, se pensó en calcular la apertura
ángulo de iluminación que colecta el sistema de visión. angular del haz de luz que sale por el ocular del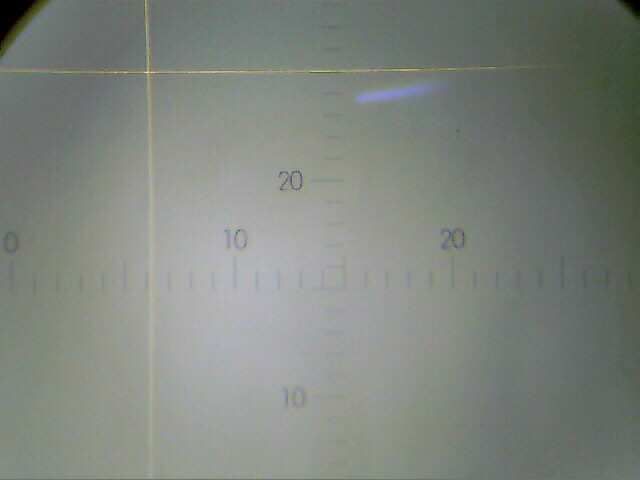
autocolimador. Recordemos que este opera proyectando luz TABLA I
MEDICIONES CON CALIBRE
hecha paralela (colimada) a través de un objetivo sobre un
objeto con una superficie reflectiva. Si la superficie es V DL(mm) DL(mm)
perpendicular a la luz proyectada, el haz es reflejado de vuelta C1 C2
a su punto de origen. Sin embargo, si la superficie esta 0 7.32 7.60
inclinada relativa al eje óptico del colimador, la luz reflejada 1 7.82 8.10
se desplaza (visualizado contra la cuadrícula – usualmente una 2 8.18 8.65
línea en cruz). 3 8.92 9.10
4 9.18 9.70
5 9.90 10.30
Utilizando regresión lineal simple, el paso p para cada
calibre es resulta la pendiente de la recta ajustada. Los valores
estimados con sus incertezas son
Para C1, p1 = (0,49± 0,04)mm/vuelta
Para C2, p2 = (0,52± 0,01)mm/vuelta
Fig. 9 Esquema del Análisis de la imagen virtual.
Promediando los resultados obtenidos para cada calibre el
paso p es:
Reemplazando la cámara por una lupa en el ocular del
autocolimador, se colocó una hoja de papel como pantalla, y p = (0,50 ± 0,03)mm/vuelta
se midieron las distancias d1 y d2 esquematizadas en la figura
9. Manteniendo d1 fija y moviendo d2 (corriendo la pantalla)IV. Cantidad de vueltas para enfocar cámara al infinito.
se observó se producían cambios en la imagen vista pero no se
podía diferenciar si la cruz estaba en foco, por lo cual no se Para obtener la cantidad de vueltas necesarias para enfocar
podía medir la cruz para calcular la distancia angular. la cámara al infinito, se procedió primero a enfocar la cámara
Este experimento tampoco dió el resultado esperado. sobre un objeto hasta que apareciera nítidamente en la
pantalla de la PC. Luego se giró el tornillo, contando desde
III. Medición del paso de la rosca de la web-cámara. la vuelta 0, y se observó en la pantalla el progreso de la
imagen. Se llegó a la conclusión que para 3 y ¼ vueltas, la
Para poder realizar múltiples experimentos comparables cámara ya está enfocada al infinito, y esa es la mejor posición
entre sí, necesitamos fijar algunos parámetros de la cámara. donde se ve la cruz.
La distancia entre el objetivo (lente de la cámara) y el sensor El valor obtenido debe ser siempre la referencia para la
CCD (la distancia focal), se regula haciendo girar el objetivo siguiente experiencia, ya que los valores pueden variar en
mediante una rosca. Es necesario medir el paso de esa rosca función de un valor de enfoque diferente.
(distancia recorrida al girar una vuelta) para poder calcular la
posición ideal del objetivo para mantener constante el foco de V. Campo de Visión.
la cámara con la imagen más nítida posible.
El método utilizado fue medir cuantos “mm” se desplazaba Una vez mas, para lograr medir los dos ángulos de apertura
linealmente el segmento rosca-lente mediante un calibre de de la cámara, que cubrirían toda la retícula, se utilizó el
una precisión conocida. criterio mostrado en la Fig. 11.
Fig. 10 Esquema del Análisis de la imagen virtual.
En la tabla 1 podemos apreciar una parte de las mediciones
realizadas. DL es el desplazamiento lineal y C1, C2 son los Fig.11 Esquema de medición del ángulo de apertura.
calibres utilizados. C1 tiene una precisión de 0,02mm y C2 Se procedió a medir los valores de x e y (Fig. 12), donde el
tiene una precisión de 0,05mm. rectángulo mostrado representa la pantalla de la PC.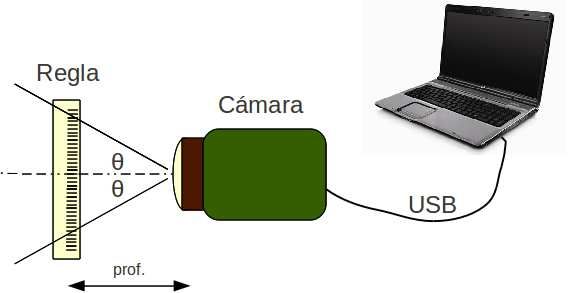
Dada una profundidad (prof L) fijada según la necesidad
vueltas Y (p/ 20 cm de prof)
de mantener el foco para tomar las mediciones lo mejor
3¼ 10.7
posible, se calculó mediante trigonometría el ángulo de
3 3/8 10.6
apertura. El valor medido con la regla se podía obtener
fácilmente al observar la pantalla de la PC que mostraba el 3½ 10.5
máximo valor captado según el campo de visión propio de la 3 muy borroso
cámara. 3 1/8 10.8 aprox
La incertidumbre de y resultó de 1 mm.
VII. Ángulo de apertura horizontal.
Siguiendo un mismo procedimiento que el anterior. Se
llegó al siguiente resultado:
Fig. 12 Esquema de la pantalla y el campo observado por la cámara web.
θh = (19.9 ± 0,1)°
Fórmula utilizada para calcular apertura angular:
Se pudo corroborar al tomar una fotografía con la cámara y
y/2 (1) obtener su resolución que los ángulos obtenidos fueron
θ = arctan
Pr correctos.
Si 640 pixeles _____________ 19,9°
VI. Ángulo de apertura vertical.
480 pixeles _____________ x0 = 14,9°
TABLE II
MEDICIONES DEL
Claramente x0 coincide con θv dentro de la incertidumbre
n y(cm) Prof(cm) θ(grados) CAMPO DE VISION
experimental
1 5.5 10.0 15.37
2 5.8 10.5 15.43
3 6.0 11.0 15.25
4 6.2 11.5 15.08
5 6.5 12.0 15.15
6 6.8 12.5 15.21
7 7.0 13.0 15.06
8 7.2 13.5 14.93
9 7.4 14.0 14.80 Fig. 13 Resolución en pixeles de la cámara web.
10 7.7 14.5 14.86
VIII. Reticula del autocolimador.
La retícula del autocolimador tiene 30 min en cada
dirección. La capacidad de visualización angular de la pantalla
Calculando el valor promedio y la desviación estándar de del autocolimador con esta cámara es
los datos obtenidos se llegó a la medida siguiente del ángulo
vertical: θ vertical = 22 min. θ horizontal = 30 min.
θv = (14,8 ± 0,1)° No se puede ver toda la pantalla debido a que la apertura
angular de la cámara CMOS no alcanza los niveles requeridos.
Por lo cual se necesita incrementar un 30% la apertura angular
Se midió también el error de enfoque. Variando las para lograr ver la pantalla completa.
vueltas, (la distancia focal), se procedió a medir cuanto
variaba la profundidad, ya que si el cambio era mucho, no se
podía aplicar el método a diferentes profundidades y focos. El V. IMÁGENES DE PRUEBA.
error de enfoque para la apertura angular vertical fue la
siguiente (la medición fue realizada con Prof = 20 cm), ver A continuación mostramos imágenes obtenidas es este
Tabla III experimento, que muestran plenamente los desafíos que
TABLE III conllevan el diseño e implementación de un sistema de visión
MEDICIONES DEL CAMPO DE VISION para reemplazar el operario en el uso del autocolimador.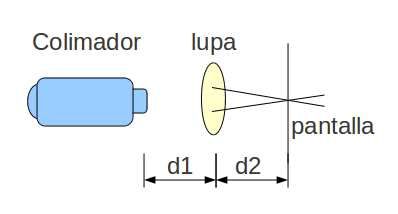
Fig. 16. Ejemplo de la Transformación de Hough
Supongamos ahora que se busca detectar rectas en el plano
Fig. 14 Ejemplo de foto obtenida cartesiano. La transformación Hough es un mapeo de R2 en
R2, que transforma cada punto en una curva, que representa
todas las rectas que pasan por dicho punto. Un haz de curvas
concurrentes (que pasan por un mismo punto) en el espacio
paramétrico representan a una recta en el espacio de salida.
En la figura siguiente Fig. 17 vemos un esquema del mapeo
de puntos en curvas, y rectas en puntos de acumulación de
curvas.
Fig. 15 Ejemplo de foto obtenida
Estas fotos fueron obtenidas con la webcam de prueba, y
muestran que no alcanza el ángulo de apertura de la cámara a
observar toda la retícula. Vemos también que la regla
graduada del autocolimador es muy suave, y no es una recta,
sino un conjunto de marcas, mientras que la línea de reflexión
del objeto es una cruz muy fina pero muy luminosa.
Observamos también la deformación de barril provocada • Un punto en el plano x-y corresponde a una curva
por el lente de la cámara cercana a los bordes de la imagen. sinusoidal en el plano φ-τ, y un punto en el plano
V. TRANSFORMADA HOUGH φ-τ, corresponde a una línea recta en el plano x-y.
• Puntos de una misma recta en el plano de x-y
Supongamos que requerimos segmentar una imagen de tal
corresponden a curvas que pasan por el mismo
forma que las líneas continuas queden remarcadas, y las líneas
punto en el plano φ-τ,.
y bordes más cortos queden solo delineados. La figura
siguiente marca el tipo de imagen que puede ser procesada • Puntos en una misma curva del plano θ-ρ
con la transformación Hough. corresponden a rectas que pasan por un mismo
punto en el plano de imagen.
Si se restringe la ecuación principal al intervalo [0, pi), la
expresión de cada línea resulta única y cada línea en el plano
x-y corresponde a un sólo punto en el plano φ-τ,.
En su conjunto se tendrá un conjunto de curvas cómo muestra
la figura siguienteFig 18: Plano paramétrico de la Transformación Hough Fig 21: Resultado de la transformación Hough en la imagen simulada.
Para poder calcular la transformación, se divide el plano en En principio pueden detectarse varios problemas:
una cuadrícula, como en la figura siguiente. 1. Las líneas simuladas son perfectamente derechas y
muy finas, pero el ancho de la cuadricula impide
detectar con esa precisión generando un grupo de
líneas en vez de una línea
2. El autocolimador no tiene una recta de referencia
sino un grupo de marcas de referencia, por lo cual
para poder medir el ángulo hay que observar cada
marca del grupo de referencia
VI. DETECTOR DE BORDES DE CANNY
Estos no son los únicos métodos que pueden utilizarse para
encontrar las líneas, los detectores de bordes usuales, como el
Fig. 19: Cuadrícula de R2 para calcular la transformación Hough. mapa de borde de Canny, producen un mapa binario que se
puede luego agregar a la imagen para mejorar la medición.
En dicha cuadrícula se calculan cuantos puntos de rectas Hemos aplicado el detector de bordes de Canny
caen, generando un histograma tridimensional. implementado en Matlab a la imagen tomada con la cámara de
prueba, para poder mostrar con más detenimiento el problema
de detección de líneas. El mapa de bordes siguiente fue
generado con un umbral alto, 0.1, que reduce la cantidad de
lineas detectadas y sacar el ruido. Observemos que en las
esquinas de la imagen, la deformación provocada por la
cámara se traduce en filamentos espurios.
Fig. 20: Histograma de hits de rectas
Las modas del histograma marcan las líneas presentes en la
imagen procesada.
Veamos cómo funciona este método en la imagen simulada
del autocolimador, si se pueden detectar las líneas provocadas
por el reflejo del objeto y la línea control.
Para calcularlas, se generó una imagen simulada simple, un Este mapa de bordes fue obtenido con un umbral más
círculo con dos cruces, y se aplicó esta transformación a dicha pequeño, 0.07 y se ven muchos filamentos espurios, pero
imagen. La implementación de la transformación se realizó en también muchas más de las marcas de referencia.
C++, usando algoritmos de la librería OpenCV.El campo de visión del objetivo deberá ser de 105°
aproximadamente. Para poder aumentar la precisión de la
medición deberemos aumentar la resolución de la cámara,
mediante un procedimiento subpixel.
Una primera aproximación a la segmentación de dichas
imágenes mostró los problemas que la precisión metrológica
enfrenta. Estos son:
1. Deformación óptica
2. Engrosado de las líneas de reflexión
3. Distorsión de las líneas de referencia
REFERENCIAS
[1] A. Zisserman, R. Hartley, M. Metev, and V. P. Veiko, Multiple view
Geometry in Computer Vision, 2nd ed., 2003.
[2] Optical Autocollimator Nikon 6B/6D datasheet.
[3] B. Jahne, Digital Image Processing, 5th ed, 2002.
VII. CONCLUSION [4] D. Mery, Vision por Computador, Departamento de Ciencia de la
Computación, Universidad Católica de Chile, 2000.
[5] Deans S.R., Hough Transform From the Radon Transform, IEEE
Se opto por la firma Edmund cuyos dispositivos son Trans. Pattern Analysis and Machine Intelligence, PAMI-3(2) March
compatibles entre sí permitiendo que la parte mecánica (para 1981.
el sistema de referencia) y la óptica puedan conectarse entre sí [6] Duda R.O., and Hart P.E., Use of the Hough Transform to Detect Lines
and Curves in Pictures, Comm ACM 15, pp 11-15, January 1972.
sin añadir complejidades al sistema. [7] Hough P.V.C., Method and Means for Recognizing Complex Patterns,
La cámara CCD elegida tiene 1200x1600 pixeles. Esta U.S. Patent No. 3069654, 1962.
elección es impulsada por la necesidad de obtener la mayor [8] Illigworth J. and Kittler J., A Survey of the Hough Transform,
precisión en la medida, ya que cuanto mayor sea la cantidad Computer Vision Graphics and Image Processing,44, pp 87-116, 1988.
[9] J. Canny, A Computational Approach to Edge Detection, IEEE
de pixeles mayor será la “resolución” de la medición que Transactions on Pattern Analysis and Machine Inteligence, Vol. PAMI-
obtendremos por cada fotografía. 8, No. 6, Novemeber 1986..También puede leer