Haga clic para modificar el estilo de texto del patrón Segundo nivel Tercer nivel Cuarto nivel Quinto nivel - Información del curso - Eurobot
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

D
I Haga
___ ____
clic ____
para _________
modificar el__estilo
______de
S
E __texto
_____del
___patrón
______
Ñ
O EUROBOT 2022_____
Segundo
______ nivel
M Tercer
_____ _____
nivel
I
Curso de Introducción
C Cuarto nivelal
_____ _____
Diseño
R de Robots Móviles
O Quinto
_____ _____
nivel
R
O
B Información del curso
O
T
S
Introducción al curso
D Objetivo general
I Haga
___ ____
• clic ____para _________
modificar el__estilo
______de
Fomentar el aprendizaje basado en proyectos en las aulas mediante la preparación de equipos para
S participar en Eurobot y Eurobot Junior.
E __texto
Objetivos específicos _____del
___patrón
______
Ñ • Proporcionar una base sólida teórica y práctica a los profesores en la que apoyarse para la
O •
Segundo
______ _____
nivel
realización de proyectos de tecnología.
Ayudar a entender los elementos hardware más utilizados relacionados con el diseño de un robot
Tercer
_____ _____
nivel
móvil para sentirse seguro al usarlos en el aula.
M • Aprender a resolver los problemas que suelen aparecer al intentar que un robot realice varias tareas
I a la vez.
C •
Cuarto
_____ _____
nivel
Orientar en la forma de enfrentarse a un proyecto de complejidad media de diseño de robots
móviles.
R • Proporcionar ideas para realizar actividades didácticas orientadas a la realización de un proyecto
O Quinto
_____ _____
nivel
final de participación en una competición de robótica.
R Modalidad de enseñanza
O • El curso seguirá una metodología de enseñanza a distancia con sesiones online-síncronas y trabajo
B personal de los alumnos.
O • Los alumnos tendrán acceso a una plataforma de enseñanza virtual donde estará el material
didáctico y a través de la cual se impartirán las clases online síncronas.
T Personas a las que va dirigido
S • El curso está orientado a profesores o líderes de equipo de jóvenes o estudiantes preuniversitarios.
Introducción al curso
D Resumen de contenidos
I Haga
___ ____
clic ____ para _________
modificar el__estilo ______
• Introducción a las plataformas hardware de control más utilizadas
de
S
E __ texto
_____ del ___ patrón______
• Movimiento en robots móviles: motores de corriente continua
• Percibiendo el entorno: generalidades de los sistemas de medida
Ñ
O Segundo
______
• Percibiendo el entorno: _____
nivel
sensores más utilizados
• Otros actuadores en robots móviles
M Tercer
_____ y_____
• Introducción a las comunicaciones alnivel
telecontrol
I • Técnicas de programación de robots móviles
C Cuarto
• Introducción al diseño_____ _____
nivel
mecánico de robots móviles.
R • Herramientas pedagógicas para realizar proyectos STEM en el aula.
O Quinto
• Metodología de gestión_____
de proyectos_____
nivel
R
O Material didáctico de apoyo
B • Material didáctico utilizado en el curso.
O • Plataforma hardware basada en Arduino en la que se pueden probar los
T ejercicios y actividades propuestas y que puede servir de plataforma inicial
S para los alumnos.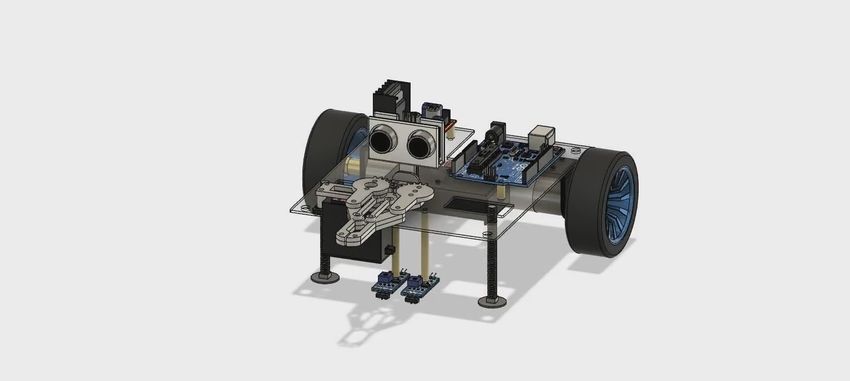
Introducción al curso
D Metodología de trabajo
I Haga
___ ____
• clic ____
para _________
modificar el__estilo
______de
El enfoque del curso es eminentemente práctico orientado en todo momento a resolver
S problemas reales que se plantean en el diseño de robots móviles y su aplicación en el
E __texto
_____del
aula. ___patrón
______
Ñ • El hecho de que el curso sea a distancia dificulta la realización de prácticas
O Segundo
______ _____
nivel
presenciales lo cual se espera que se compense con la posibilidad de utilizar un kit de
robótica que está a disposición de los alumnos.
M
•
Tercer
_____ _____
nivel
Las clases tendrán una parte más teórica (aunque con enfoque práctico) y una
propuesta de actividades que en algunos casos se realizarán durante la clase y en otros
I casos se propondrán para realizar de forma asíncrona.
C • Cuarto
_____ _____
nivel
Debido a que el objetivo es que los participantes tomen un papel activo liderando un
R equipo, se reservan dos sesiones que serán “especiales”
O Quinto
_____ _____
nivel
• Una sesión se reserva para que los participantes presenten sus experiencias y propuestas de
proyectos promoviendo un debate entre los participantes
R • Una sesión en la que también estarán invitados los estudiantes participantes en los equipos de
O robótica (los que los tengan) que donde se realizarán actividades que servirán de motivación
B para comenzar el trabajo.
O Profesorado
T • Profesores de la Universidad de Alcalá del Departamento de Electrónica,
S Departamento de Física y Matemáticas y Departamento de Ciencias de la Educación.Introducción al curso
D Nivel del curso y conocimientos previos
I Haga
___ ____clic ____
para _________
modificar el__estilo ______
• Curso orientado a profesores de tecnología que tienen conocimientos
de
S
E __texto_____
en C ydel ___ patrón
______
básicos de programación en Arduino o en cualquier otro
microcontrolador que tienen interés en profundizar en la
Ñ programación y el diseño de robots móviles.
O • También podría serSegundo
______
interesante para _____
nivel
personas que, teniendo conocimientos
básicos de programación, tiene interés en liderar un proyecto de robótica
M móvil. Tercer
_____ _____ nivel
I • El curso se puede entender como de un nivel intermedio-alto. Se entiende
C Cuarto
_____
que los asistentes tienen _____
nivel
conocimientos de programación y conocimientos
R sobre Arduino y en el curso se profundizará en el conocimiento y el uso de
O Arduino así como enQuinto
_____ _____
nivel
el uso de hardware externo utilizado en robótica móvil.
R Duración del curso
O • La duración prevista es de 60 horas, 40 horas presenciales síncronas y 20 horas de
B trabajo personal organizadas en 10 sesiones de 4 horas (2 sesiones semanales).
O • Plataforma hardware basada en Arduino en la que se pueden probar los ejercicios y
T actividades propuestas y que puede servir de plataforma inicial para los alumnos.
S • Fecha prevista de inicio: semana del 13 de septiembre.Introducción al curso
D Coste del curso
I Haga
___ ____
clic ____ para _________
modificar el__estilo ______ de
• El coste del curso será gratuito para las personas que lideren equipos para
S
E __texto _____del ___ patrón
______
participar en la competición Eurobot o Eurobot Jr en 2020.
• Si no se participa en la competición el coste será de:
Ñ
O Segundo
______ _____
• 100 € por el kit de robot móvil
• 100 € por la formación.
nivel
M Tercer
_____ _____ nivel
• Se puede participar en el curso sin adquirir el robot. En este caso el coste
sería de 100 €.
I
y los equipos que seCuarto
_____
inscriban en la _____
nively el importe será devuelto a
• El importe deberá de ser abonado por todos los participantes en el curso
C competición
R
O Quinto
_____ _____
nivel
las personas que inscriban a un equipo para la competición.
• El kit de robótica podrá ser recogido en la Universidad de Alcalá o enviado
R por correo postal. En este caso, el envío se realizará contrareembolso
O asumiendo el receptor los costes del transporte.
B
O
T Certificación de participación
S • Al finalizar el curso se realizará un certificado de participación en el curso
indicando las horas, contenidos impartidos y grado de asistencia.Introducción al curso
D Contenidos detallados (1/4)
I Haga
___ ____
clic ____
para _________
– Introducción al curso
modificar el__estilo ______ de
S
E __texto _____del ___ patrón
______
• Objetivos, organización, material y metodología.
• Introducción a la competición Eurobot y Eurobot Jr
Ñ
O 1 Segundo
______ _____ nivel
– Introducción a las plataformas hardware de control más utilizadas
• Arduino. Microbit. Raspberry Pi. Crumble.
M Tercer
_____ _____ nivel
• Profundizando en Arduino UNO. Hardware interno. Depurando por el puerto
serie.
I
C Cuarto
_____ _____ nivel
• Características eléctricas de los puertos de entrada y salida
R
O Quinto
_____ _____ nivel
– Movimiento en robots móviles: motores de corriente continua
• Repaso de magnitudes físicas. Principios de funcionamiento. Características de
R motores y selección del más adecuado
O • Control de la velocidad de un motor: señales PWM, transistores de potencia,
B 2 puente en H
O • Generación de señales PWM con Arduino.
T • Cinemática directa e inversa en robots con tracción diferencial.
S • Actividades de ejemplo y referencias.Introducción al curso
D Contenidos detallados (2/4)
I Haga
___ ____clic ____para _________
modificar el__estilo ______
– Percibiendo el entorno: generalidades de los sistemas de medida
de
S
E __texto _____del ___ patrón
______
• Generalidades de los sistemas sensoriales y de medida. Exactitud, Fidelidad,
Calibración, Linealidad, Resolución, Errores, Aspectos temporales.
Ñ
O Segundo
______ _____ nivel
• Conversión analógico a digital. Generalidades. Frecuencia de muestreo.
Conversión A/D en Arduino.
• Lectura se señales analógicas. Divisor de tensión. Sensor de corriente ACS712.
M Tercer
_____
– Percibiendo el entorno: _____
nivel
sensores más utilizados
I 3 • Sensores de contacto. Bumpers y Finales de Carrera.
C Cuarto
_____ _____ nivel
• Sensores de infrarrojos transmisivos y reflexivos. Sensores de línea. Encoders
R • Sensores de giro. Interrupciones externas en Arduino. Interrupciones periódicas en
O Quinto
_____ _____ nivel
Arduino. Medida de la velocidad de un motor. Medida de la velociad lineal y
R angular de un robot. Estimación de la posición por odometría.
O • Sensores de distancia por ultrasonidos.
B • Sensores de distancia por infrarrojos.
O • Otros sensores avanzados. Lidar.
T
SIntroducción al curso
D Contenidos detallados (3/4)
I Haga
___ ____
clic ____
para _________
modificar el__estilo
– Otros actuadores en robots móviles
______
de
S
E __texto
_____del
• Motores paso a paso
___ patrón
______
• Servomotores. Control de una pinza.
Ñ
O
4
Segundo
______ _____
nivel
• Relés electromecánicos y de estado sólido.
M Tercer
_____ _____ nivel
– Introducción a las comunicaciones y al telecontrol
• Comunicación serie asíncrona. Transceivers de comunicaciones.
I
C Cuarto
_____ _____ nivel
• Comunicación serie síncrona. I2C y SPI.
• Comunicación por Bluetooth y WiFi
R
O Quinto
_____ _____ nivel
– Técnicas de programación de robots móviles
R
O 5 • Diseño utilizando máquinas de estados programadas
B • Introducción a los algoritmos de control. Control PID.
O
T 6 – Introducción al diseño mecánico de robots móviles.
S • Estructuras y materiales más utilizados
• Introducción a la impresión 3D. Ejemplos y ejercicios de diseño.Introducción al curso
D Contenidos detallados (4/4)
I Haga
___ ____
clic pedagógicas
– Herramientas ____
para _________
modificar
para realizar proyectosel
__estilo
______
STEAM de
en el aula.
S • Aspectos metodológicos: Aprendizaje Basado en Proyectos. Design Thinking.
E 7 __texto_____del
Metodología EEEEE. ___ patrón
______
Ñ • La E de Engineering en proyectos STEAM
O Segundo
______ _____ nivel
• Gestión de equipos. Motivación. Modelos de trabajo cooperativo y colaborativo.
M Tercer
_____
– Metodología de gestión _____
nivel
de proyectos
I • Introducción. Trabajo en equipo.
C 8 • Cuarto
_____ _____
Técnicas de Brainstorming. nivel
R • Concepto de Tarea y división del trabajo: Metodologías ágiles (Kanban).
O •
Quinto
_____ _____ nivel
Repositorios de información: Github.
R
O 9 – Presentación de trabajos de los participantes
B
O – Jornada de trabajo con alumnos participantes
T 10 • Presentación de las normativas de Eurobot 2022
S • Charla sobre cómo hacer presentaciones …
• Ejercicio de brainstorming con un proyecto de EurobotIntroducción al curso
D Plataforma didáctica
I Haga
___ ____
clic ____
para _________
modificar el__estilo
______de
S
E __texto
_____del
___patrón
______
Ñ
O Segundo
______ _____
nivel
M Tercer
_____ _____
nivel
I
C Cuarto
_____ _____
nivel
R
O Quinto
_____ _____
nivel
R • Estructura de aluminio por corte por láser • Dos sensores de línea
O • Dos motores de corriente continua con • Sensor de corriente ACS712
B reductora y encoders • 1 Servomotor RC
O • Arduino UNO
T • Shield de expansión con protoboard
• Pinza robóticas
S • Baterías
• Puente en H: L298 • Cargador de bateríasIntroducción al curso
D Número de plazas
I Haga
___ ____clic ____ para _________
modificar el__estilo ______ de
• El número de Kits disponibles es de 20 por lo que este es el número de plazas
S
E __texto
_____del
abiertas inicialmente.
___ patrón
______
• Las plazas se irán llenando por orden de formalización de la inscripción.
Ñ
O Segundo
______ _____
Procedimiento de inscripción nivel
• Rellenar los datos del formulario de inscripción
M Tercer
_____ _____
• https://forms.gle/xNdnwu4rZfqmExKe6 nivel
I • Realizar una transferencia por 200€ (o 100€ en caso de no querer el kit) a la
C cuenta a nombre de laCuarto
_____
Universidad de _____
nivel
Alcalá
R (Banco de Santander: ES28 0049 6692 82 2116216000 SWIFT: BSCHESMM)
O • En el concepto de laQuinto
_____
transferencia se_____
nivel
deberá indicar: “ALCABOT:” seguido
R del nombre y apellidos del participante.
O • Enviar el justificante de la transferencia a alcabot@uah.es
B • Se considerará la inscripción formalizada tras recibir el justificante de la
O transferencia y comprobar que los datos proporcionados son correctos y
T cumplen con los objetivos de participación.
S • Tras la inscripción de los equipos en la competición se reembolsará el
importe aportado.Calendario Previsto
D Lunes Martes Miércoles Jueves Viernes
I Haga
___ ____
clic ____
para _________
modificar el__estilo
20
______de
21
Motores DC
22 23 24
S Presentación.
E __texto
Septiembre_____del
___patrón
______
Plataformas
Hardware
Ñ 27 28 29 30 1
O Segundo
______ _____
nivel
Sensores Actuadores
Comunicaciones
M Tercer
_____ _____
nivel
4
3D
5
Técnicas
6 7 8
I Programación
C Cuarto
_____ _____
nivel
11 12 13 14 15
R
O Octubre Quinto
_____ _____
nivel
R 18 19 20 21 22
O Metodología
STEAM
Gestión de
Proyectos
B 25 26 27 28 29
O Presentaciones Jornada con
T Alumnos
S
Horario: 16:00 a 20:00D
I Haga
___ ____ clic ____
para _________
modificar el__estilo______ de
S
E __texto
_____ del
___
Proyecto patrón
______
Ñ
O EurobotSegundo y Eurobot
______ nivelJunior
_____
M 2022
Tercer
_____ _____
nivel
I
C Cuarto
_____ _____
http://www.eurobot.es
nivel
http://www.eurobot.org
R
O Quinto
_____ _____
nivel
R
O
B
O
T Contacto: alcabot@uah.es
S
Coordinador: Julio Pastor Mendoza (julio.pastor@uah.es)También puede leer