ANTROPOMETRIA FACIAL A PARTIR DE MULTIPLES VISTAS: UNA PROPUESTA METODOLOGICA
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

Universidad Nacional de Colombia
Sede Manizales
Departamento de Ingeniería Eléctrica, Electrónica y Computación
Facultad de Ingeniería y Arquitectura
ANTROPOMETRIA FACIAL A PARTIR
DE MULTIPLES VISTAS:
UNA PROPUESTA METODOLOGICA
Flavio Prieto
Trabajo presentado para optar a la categoría de
Profesor Titular
de la Universidad Nacional de Colombia
Manizales, Colombia
Enero de 2008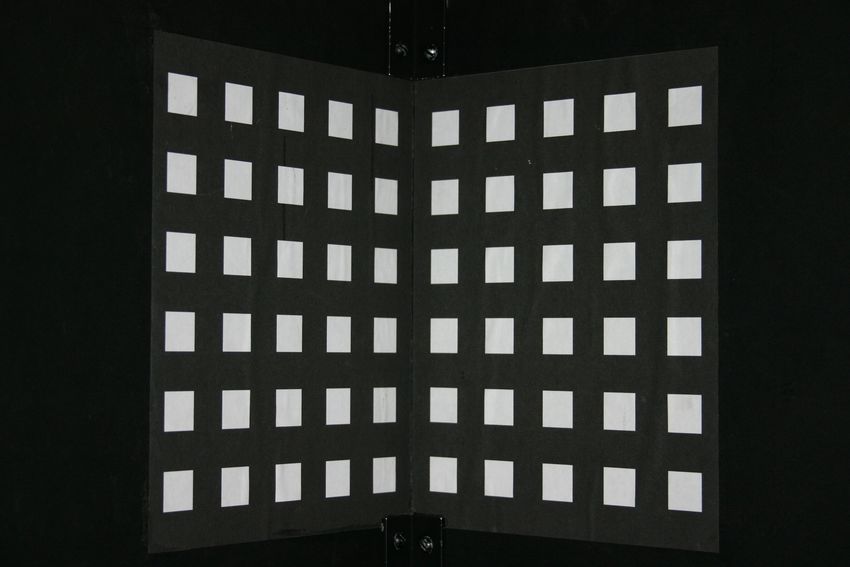

Tabla de Contenido
Tabla de Contenido I
Lista de Figuras III
Lista de Tablas V
Introducción 1
1. Antropometría Médica Facial 5
1.1. Antropometría Facial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1. Puntos característicos faciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.2. Medidas de superficie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2. Técnicas para el Estudio Antropométrico Facial . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.1. Antropometría directa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.2. Fotogrametría 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.3. Antropometría facial con imágenes tridimensionales (3D) . . . . . . . . . . . . . . 9
1.3. Análisis Antropométrico Facial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2. Calibración de Cámara 13
2.1. Modelo de Cámara . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2. Métodos de Calibración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.1. Método 1: algoritmo Tsai . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.2. Método 2: algoritmo The Gold Standard . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.3. Método 3: calibración de cámara basado en elipses . . . . . . . . . . . . . . . . . . 17
2.2.4. Modelo de cámara con distorsiones . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.5. Corrección de la distorsión radial: algoritmo The Gold Standard . . . . . . . . . . . 19
2.3. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.1. Método 1: algoritmo Tsai . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3.2. Método 2: algoritmo The Gold Standard . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3.3. Método 3: calibración de cámara basado en elipses . . . . . . . . . . . . . . . . . . 23
2.3.4. Métricas de desempeño . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3. Extracción de Características Faciales 25
3.1. Detección facial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.1.1. Aproximación de clases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1.2. Técnica de compensación de iluminación y transformación de color no lineal . . . . 26
3.1.3. Segmentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.2. Detección de los ojos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
I
TABLA DE CONTENIDO
3.3. Técnicas para la detección y extracción de caracterísitcas de la boca . . . . . . . . . . . . . 30
3.3.1. Filtrado del Tono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.2. Escala de grises . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.3. Bordes horizontales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3.4. Ajuste de curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4. Metodología para la extracción de características de la boca . . . . . . . . . . . . . . . . . . 35
3.4.1. Ubicación de la boca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.4.2. Extracción de los vértices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.4.3. Extracción del contorno exterior de los labios . . . . . . . . . . . . . . . . . . . . . 38
3.4.4. Plantilla de la boca basada en contornos activos . . . . . . . . . . . . . . . . . . . . 38
3.5. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.5.1. Localización de la boca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.5.2. Detección de vértices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.5.3. Extracción del contorno exterior de los labios . . . . . . . . . . . . . . . . . . . . . 43
4. Geometría de Dos Vistas 47
4.1. Geometría de dos vistas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2. Modelo de Cámara, Imágenes Sintéticas y Estimación . . . . . . . . . . . . . . . . . . . . . 48
4.3. El sistema de adquisición 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3.1. Calibración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.3.2. Adquisición y procesamiento de las imágenes . . . . . . . . . . . . . . . . . . . . . 52
4.3.3. Estimación de las correspondencias . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.3.4. Reconstrucción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.4. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5. Resultados 61
5.1. Antropometría directa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2. Fotogrametría 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.2.1. Calibración de la imagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.2.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.3. Antropometría con imágenes tridimensionales (3D) . . . . . . . . . . . . . . . . . . . . . . 64
5.3.1. Selección de puntos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.3.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Conclusiones Generales 69
Bibliografía 71
II
Lista de Figuras
1.1. Puntos característicos del complejo facial para una vista frontal. . . . . . . . . . . . . . . . 6
1.2. Puntos característicos del complejo facial. . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3. Sliding Caliper, Spreading Caliper, Coordinated Caliper, y Attachable Goniometer. . . . . . 8
1.4. Características consideradas para el análisis antropométrico de la región de la boca. . . . . . 11
2.1. Modelo de Cámara. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2. Proyección de una cónica en el espacio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3. Patrones de calibración. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4. Corrección de la distorsión radial. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.1. Compensación de iluminación empleando la técnica “blanco de referencia”. (a) Imagen sin
compensación. (b) Imagen con compensación. . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2. Color de la piel en el espacio de color Y Cb Cr . Los puntos azules representan el color repro-
ducible en un monitor y los rojos representan las muestras del color de piel. . . . . . . . . . 28
3.3. Imagen en el espacio de color Y Cb Cr . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4. Proyección en Cb Cr del espacio de color transformado, en el cual el modelo elíptico del
color de piel está sobrecargado en su cluster (los puntos rojos indican el cluster de la piel). . 29
3.5. Detección facial. (a) Imagen de color. (b) Imagen en el espacio de color Y Cb Cr . (c) Imagen
segmentada en base al modelo elíptico. (d) Imagen después del análisis de regiones. . . . . . 29
3.6. Rostro detectado y ubicación de los ojos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.7. Distribución tonal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.8. Filtrado del tono. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.9. Análisis en escala de grises. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.10. Bordes horizontales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.11. Ubicación de la boca. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.12. Detección de vértices: gradiente vertical. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.13. Detección de vértices: REBPS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.14. Extracción del controno. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.15. Primera aproximación al controno exterior de la boca. . . . . . . . . . . . . . . . . . . . . . 41
3.16. Ajuste del labio inferior por medio de una función polinómica. . . . . . . . . . . . . . . . . 41
3.17. Ajuste del labio superior por medio de funciones polinómicas. . . . . . . . . . . . . . . . . 41
3.18. Ajuste de los labios usando funciones polinómicas. . . . . . . . . . . . . . . . . . . . . . . 42
3.19. Resultados de la extracción del contorno exterior. . . . . . . . . . . . . . . . . . . . . . . . 45
4.1. Sistemas de coordenadas de la cámara y el mundo. . . . . . . . . . . . . . . . . . . . . . . 49
4.2. Configuración espacial de la cámara e imágenes resultantes. . . . . . . . . . . . . . . . . . 50
4.3. Sistema de adquisición. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
III
LISTA DE FIGURAS
4.4. Patrón de calibración. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.5. Parámetros para la extracción de esquinas. . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.6. Esquinas reconstruidas a partir de las imágenes del patrón. . . . . . . . . . . . . . . . . . . 54
4.7. Geometría para la estimación de correspondencias. . . . . . . . . . . . . . . . . . . . . . . 55
4.8. Correspondencias extraídas de dos vistas calibradas. . . . . . . . . . . . . . . . . . . . . . . 55
4.9. Nube de puntos para estimación lineal y posterior optimización. . . . . . . . . . . . . . . . 56
4.10. Densidad de probabilidad condicional fcond (Xn|xn1 , xn2 ). . . . . . . . . . . . . . . . . . 57
4.11. Puntos medidos de una línea de barrido para un plano. . . . . . . . . . . . . . . . . . . . . 58
4.12. Imagen 3D de un rostro humano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.1. Sistema de adquisición de imágenes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2. Patrón de calibración 2D. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.3. Nube de puntos de un rostro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.4. Contornos extraidos sobre los labios de un sujeto. . . . . . . . . . . . . . . . . . . . . . . . 65
5.5. Reconstrucción 3D del contorno de los labios. . . . . . . . . . . . . . . . . . . . . . . . . . 67
IV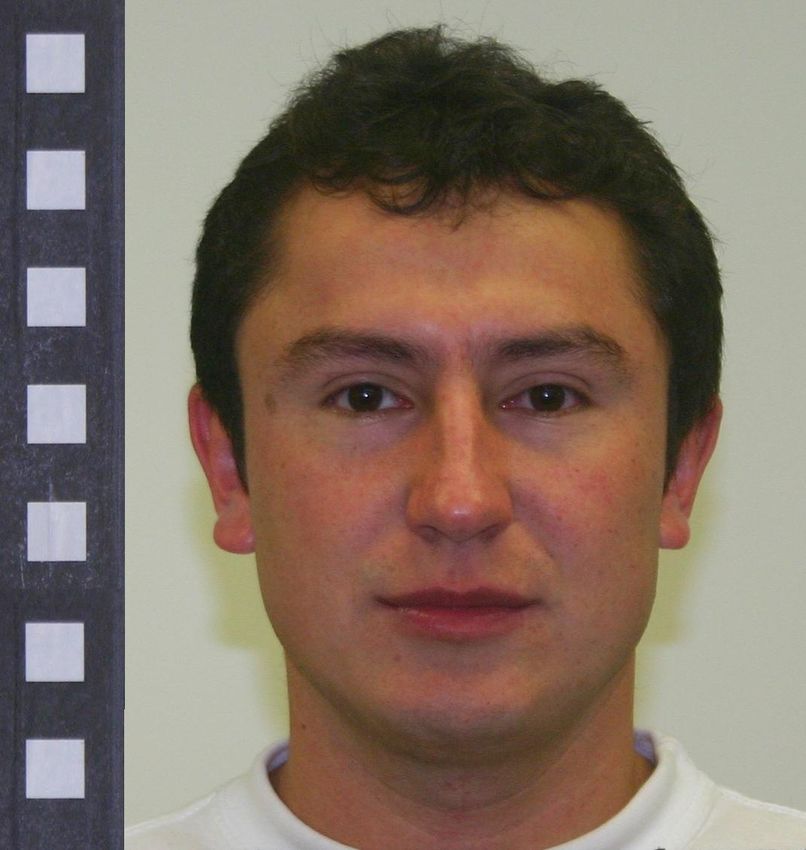
Lista de Tablas
1.1. Medidas básicas propuestas en seis regiones del complejo craneofacial. . . . . . . . . . . . 7
1.2. Medidas de acuerdo a la línea de referencia vertical. . . . . . . . . . . . . . . . . . . . . . . 8
1.3. Medidas de acuerdo a la línea de referencia horizontal. . . . . . . . . . . . . . . . . . . . . 9
2.1. Características de la cámara Canon EOS Digital Rebel EF-S 18-55. . . . . . . . . . . . . . . 21
2.2. Características de la cámara Genius VideoCam Messenger. . . . . . . . . . . . . . . . . . . 21
2.3. Resultados con el Método Tsai. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4. Resultados con el método Tsai + Optimización. . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5. Resultados con el Método The Gold Standard. . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.6. Resultados con el Método The Gold Standard + Corrección Distorsión Radial. . . . . . . . 23
2.7. Resultados con el Método de Calibración Basado en Elipses. . . . . . . . . . . . . . . . . . 24
2.8. Métricas de Desempeño. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.1. Desempeño del algoritmo DARP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2. Error en la detección automática de vértices. . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.3. Tiempos de proceso para la detección de los vértices. . . . . . . . . . . . . . . . . . . . . . 43
3.4. Matriz de confusión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.5. Matriz de confusión. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.1. Medidas utilizadas. ∗ Se toman para la izquierda y la derecha de forma separada. . . . . . . . 61
5.2. Medidas obtenidas por antropometría directa. Valores en milímetros. NA: No Aplica. . . . . 62
5.3. Medidas antropométricas por medio de la fotogrametría 2D. Valores en milímetros. . . . . . 64
5.4. Fotogrametría 2D vs. Antropometría directa. . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.5. Medidas antropométricas con imágenes tridimensionales (3D). Valores en milímetros. . . . . 68
5.6. Antropometría con imágenes tridimensionales vs. Antropometría directa. . . . . . . . . . . 68
V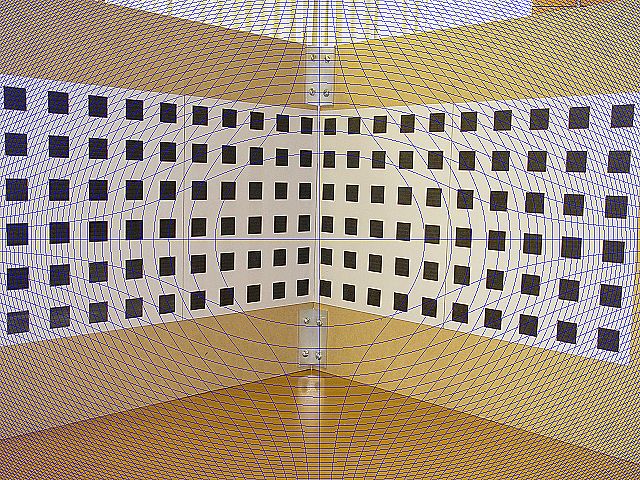
LISTA DE TABLAS
VI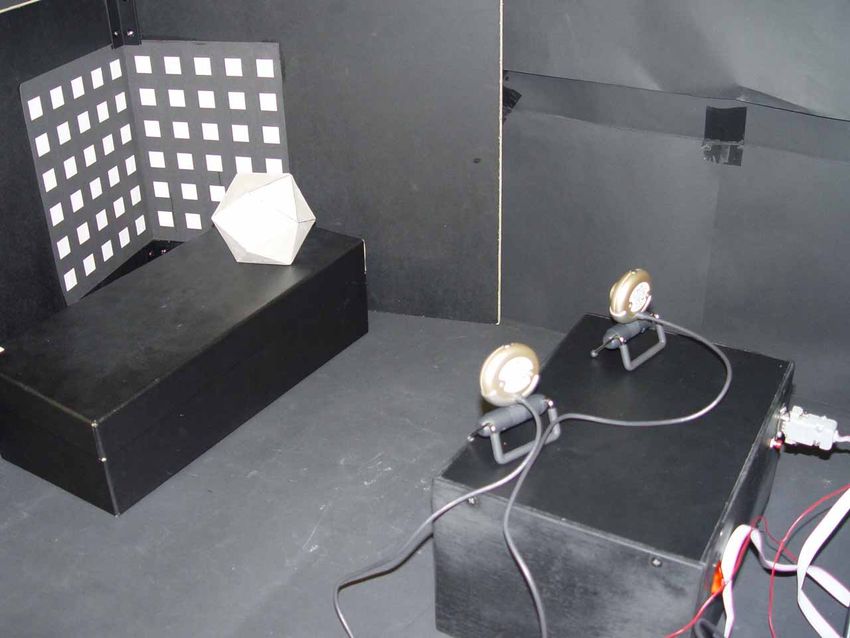
Introducción
El procesamiento de imágenes faciales es una de las áreas de mayor desarrollo dentro de los sistemas de
visión artificial [1–4]. Las medidas faciales han sido variables fundamentales para determinar las caracterís-
ticas específicas de cierta raza, el establecimiento de reglas para dibujar el rostro y la cabeza, aplicaciones de
carácter médico en general; de manera más reciente, se han desarrollado aplicaciones en interfaces hombre-
máquina a través del reconocimiento automático de rostros y en seguridad. Por ejemplo, en aplicaciones
médicas, el estudio de anomalías faciales en niños se realiza comparando sus medidas con datos promedio
obtenidos dentro de la población a la cual pertenece el sujeto. Las medidas de esta población deben mostrar
unos intervalos de normalidad que permitan ubicar las medidas faciales del paciente dentro de un rango,
estableciendo la existencia de alteración o no dentro de ella [5].
La determinación de las medidas faciales, hecha de manera manual, es una tarea que toma mucho tiempo y
en muchos casos es imprecisa, debido a la valoración subjetiva de quien realiza las medidas. En búsqueda
de mejorar la eficiencia y precisión del proceso de obtención de dichas medidas, desde inicios de los años
80 se ha venido sistematizando este proceso bajo el nombre de fotogrametría del rostro [6, 7]. Sin embargo,
estos trabajos se han basado tradicionalmente en medidas bidimensionales, lo que conlleva a la introducción
de un error debido a la forma tridimensional del rostro. Lo anterior, junto con la evolución de los sistemas de
adquisición de imágenes tridimensionales [8], que ya han alcanzado un alto grado de precisión, permite que
en la actualidad se puedan realizar análisis de imágenes faciales utilizando este tipo de tecnología [9]. No
obstante, la gran mayoría de los trabajos actuales de análisis facial utilizando información 3D, están orienta-
dos a la identificación de rostros [1–3, 10], esto debido, posiblemente, al importante número de aplicaciones
comerciales y de seguridad, dejando un vacío en aplicaciones de antropometría para cirugía reconstructiva
facial [11, 12].
Por lo anterior, en este trabajo se presenta una propuesta metodológica, para lo que podría ser un sistema
médico de antropometría facial utilizando imágenes tridimensionales, reconstruidas a partir de múltiples
vistas 2D. Las imágenes tridimensionales suministran información que puede permitir determinar de ma-
nera precisa la morfología facial, facilitando la planificación de un tratamiento y la definición de cambios, a
medida que las estructuras anatómicas (óseas y tejidos blandos) del paciente se desarrollan o el tratamiento
evoluciona. Adicionalmente, estas imágenes son tan fáciles de capturar como las imágenes de fotogrametría.
Este tipo de sistemas además permiten la evaluación de un mayor número de imágenes en un menor tiempo,
y reducen de manera significativa las variaciones indeseadas que se presentan en la evaluación del experto,
al tener criterios de medida claramente definidos y automatizados.
Este trabajo se centra en la medición automática de algunas caracteristicas de la boca. Pero siguiendo una
metodología similar el sistema se puede ampliar para que realice un análisis antropométrico facial completo.
El sistema de adquisición propuesto es un sistema estéreo activo, que combina dos cámaras CCD y una fuen-
te de luz estructurada. Las imágenes adquiridas por las cámaras CCD son imágenes bidimensionales y, sobre
1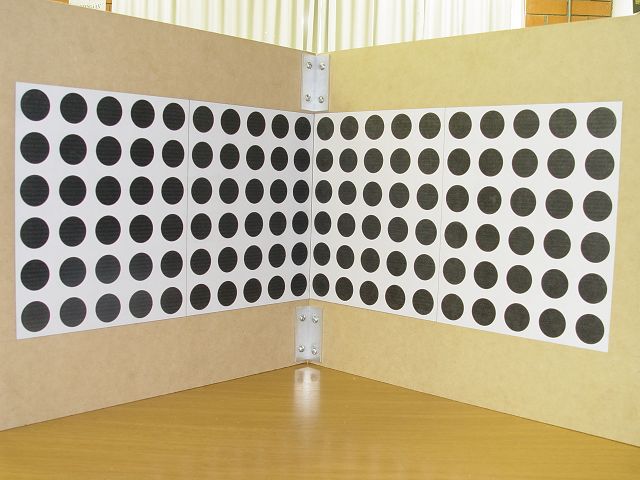
Introducción
ellas se realiza todo el procesamiento para extraer las caracterísiticas faciales de interés. Poste-riormente,
utilizando una técnica de reconstrucción a partir de dos vistas, estos puntos característicos son llevados al
espacio tridimensional, donde se realizan las medidas antropométricas.
Este documento está compuesto, además de esta introducción y de las conclusiones generales, por cinco
capítulos así: Capítulo 1: Antropometría Médica Facial, Capítulo 2: Calibración de Cámara, Capítulo 3:
Extracción de Características Faciales, Capítulo 4: Geometría de Dos Vistas y, Capítulo 5: Resultados. A
continuación se describe brevemente cada uno de estos Capítulos.
En el Capítulo 1 se presentan algunos conceptos básicos de la antropometría médica facial. Se enuncian
los diferentes puntos característicos del rostro, los cuales son utilizados para realizar las diferentes medidas
antropométricas faciales. Es de anotar que en la literatura se han descrito más de 159 medidas. También
se enumeran las medidas básicas para las seis regiones del complejo craneofacial, como son: cabeza, ca-
ra, ojos, nariz, labios y boca, y orejas. Posteriormente se presentan las técnicas utililizadas para realizar
el estudio antropométrico facial. La técnica directa o manual, que es tal vez la técnica más utilizada en
la actualidad, es sin embargo una tarea que implica mucho tiempo de trabajo e imprecisión generada por
la valoración subjetiva de la persona que realiza las medidas. Luego es introducida la técnica de fotogra-
metría, como una técnica que busca mayor eficiencia y precisión en el proceso de adquisición de dichas
medidas. Esta técnica utiliza fotografías o imágenes bidimensionales del sujeto. Sin embargo, y aunque se
hacen algunas correcciones, tiene el problema de que las medidas son tomadas de las proyecciones de los
puntos característicos en el plano de imagen, perdiendo la información tridimensional del rostro. La última
técnica presentada es la realizada con imágenes tridimensionales. Más que una tecnología consolidada, ella
está en pleno desarrollo, como se deduce por la revisión bibliográfica que se realiza. El capítulo termina de-
finiendo las características sobre las que se concentra este trabajo, que están enfocadas a la región de la boca.
En el Capítulo 2 se introduce lo relacionado con el proceso de calibración de cámara. La información tridi-
mensional utilizada en este trabajo, para realizar las medidas de antropometría facial, es obtenida mediante
el uso de sistema activo compuesto por dos cámaras CCD (dos vistas), y un patrón de luz proyectada. Como
la antropometría requiere medidas de buena calidad, una etapa de calibración del sistema es necesaria para
garantizar la calidad de las medidas 3D. Después de definir la geometría o el modelo de cámara utilizado,
se introducen algunos de los algoritmos de calibración comúnmente utilizados. Finalmente, se muestra la
evaluación de la calibración del sistema empleando los diferentes métodos y se selecciona el método The
Gold Standard con corrección radial de lo lentes, por ser el que arroja menor error en las medidas.
Se expone en el Capítulo 3 todo lo relacionado con el proceso de extracción de características faciales. La
metodología utilizada inicia con la detección del rostro en la imagen, seguida por la detección de los ojos
y de la boca. Esta última es la región de interés, donde se hace una búsqueda refinada de las características
seleccionadas para este trabajo. La detección del rostro en la imagen es fundamental ya que al permitir ais-
larlo del resto de la imagen, disminuye el costo computacional y aumenta el desempeño de los algoritmos
posteriores. Por lo tanto, se presentan algunas técnicas para la detección de la posición exacta del rostro en la
imagen. Si bien el trabajo está orientado a la extracción de características de la boca, se presenta un apartado
sobre la detección de los ojos, ya que la ubicación de ellos se utiliza para la detección de la boca, también
como una posible extensión del trabajo a otras medidas antropométricas. Se utilizan técnicas basadas en
imagen-píxel, las cuales presentan un buen desempeño en la detección y extracción de características de la
boca, cuando se tienen condiciones de iluminación controladas, como fue el caso de este trabajo. Posterior-
mente, se presentan los algoritmos implementados para la detección de la boca, extracción de los vértices
(comisuras de los labios) y extracción y aproximación del contorno exterior de los labios, superior e inferior,
2Introducción
separadamente. El Capítulo concluye con la evaluación del desempeño de los algortimos implementados,
que fueron evaluados sobre una base de datos de imágenes faciales, recogida para un estudio antropométrico
dirigido a la población infantil de la ciudad de Manizales.
Hasta aquí, la información que se ha procesado es sobre imágenes bidimensionales, pero como se busca
hacer un análisis antropométrico tridimensional, en el Capítulo 4 se presenta el sistema estéreo activo (com-
binación entre dos cámaras CCD: estéreo, y una fuente de luz estructurada: línea de barrido), que permite
obtener la imagen tridimensional, a partir de dos vistas 2D. El capítulo inicia presentando los fundamentos
matemáticos de la geometría de dos vistas y el modelo de cámara. Posteriormente, se discute el sistema
de adquisición y, en particular, los algoritmos que se requieren para obtener las imágenes 3D. Ellos son:
calibración de las cámaras, procesamiento de las imágenes, estimación de las correspondencias entre las dos
vistas (imágenes) y reconstrucción de la imagen 3D. El capítulo concluye presentando algunos resultados
de reconstrucción de imágenes u obtención de imágenes 3D.
Los resultados globales de trabajo se presentan en el Capítulo 5. Allí se muestra que la antropometría facial
con imágenes tridimensionales arroja resultados prometedores como metodología con baja dispersión para
realizar este tipo de medidas antropométricas.
3Introducción
4Capítulo 1
Antropometría Médica Facial
Del griego ανθρωτ τ oς: hombre, y µτ ρoν: medida, medir; lo que significa medidas del hombre, ciencia
que estudia las medidas del hombre. Se refiere al estudio de las dimensiones y proporciones de las partes
del cuerpo humano, con el propósito de comprender los cambios físicos del hombre y las diferencias entre
sus razas y sub-razas [13].
En el siglo XIX y comienzos del XX, la antropometría fue una pseudo-ciencia empleada principalmente
para clasificar criminales potenciales a través de sus características faciales. La Antropología Criminal de
Cesare Lombroso (1895), por ejemplo, establecía que los asesinos tenían mandíbulas prominentes y los la-
drones manos largas y barbas escasas. El trabajo de Eugène Vidoqc, el cual identifica criminales por medio
de sus características faciales, es empleado aún, casi un siglo después de su introducción [14].
El uso de la antropometría ha sido potencializado en las diferentes áreas del desempeño humano [15]. En
medicina, la comparación cuantitativa de los datos antropométricos con la medida de los pacientes antes y
después, fomenta la planeación y evaluación de la cirugía plástica y reconstructiva. En antropología forense,
conjeturas como las medidas aproximadas, derivadas de la antropometría, figuran en la determinación de
la apariencia de los individuos a partir de sus recuerdos, y en la búsqueda de niños perdidos, envejeciendo
su apariencia a través de fotografías anteriores. Actualmente, la antropometría es usada para la evaluación
del estado nutricional, para monitorear el crecimiento de la población infantil, para el diseño de muebles de
oficina y para el establecimiento de medidas estándares para el diseño de ropa, entre otras [14].
1.1. Antropometría Facial
Antropometría facial es la medida de la superficie de la cabeza y de la cara. Originada durante el rena-
cimiento y definidos sus métodos por las reglas de expresión del neoclasicismo, expresa la calidad de las
relaciones entre varias partes del cuerpo humano [16]. La introducción de medidas individuales de la cabeza
y de la cara, desarrolladas principalmente para la medida del cráneo, data de la segunda mitad del siglo
XIX. La antropometría experimentó un renacimiento hace 3 décadas, cuando los médicos comenzaron a
usar las medidas de la superficie de pacientes con deformidades craneofaciales congénitas o adquiridas [17].
Gra-dualmente, ganó reconocimiento como un método objetivo para determinar cambios en la morfología
de los tejidos blandos de la cara, permitiendo el establecimiento de los rasgos característicos del ser humano
de acuerdo a su raza y sexo, y las diferentes anomalías faciales dentro de una población determinada [7].
La evaluación antropométrica facial está basada en la determinación de locaciones particulares del sujeto,
para el caso más concreto, los puntos característicos del rostro, definidos en términos de las características
visibles o palpables del complejo facial. Un conjunto de medidas entre dichos puntos es obtenido empleando
5Capítulo 1. Antropometría Médica Facial
procedimientos e instrumentos de medida exactos [15].
1.1.1. Puntos característicos faciales
La anatomía del cráneo incluye puntos externos e internos, que describen de manera general su estructura.
La cefalometría del rostro está conformada por planos y puntos característicos, estos últimos clasificados de
acuerdo a su naturaleza de blandos o duros.
Vista frontal del rostro.
Visto de frente, el rostro humano posee puntos característicos distribuidos a lo largo de las 6 regiones del
complejo facial, las cuales permiten establecer las diferentes medidas para el estudio antropométrico. Algu-
nos de los puntos característicos faciales de acuerdo a la vista frontal se pueden observar en la Figura 1.1,
y se listan a continuación [7]: Eurión (eu), Cigión (zy), Nasión (n), Gnatión (gn), Subnasal (sn), Alar (al),
Queilión (ch), Estomión (sto), Endocanto (en), Exocanto (ex), Labiale Superius (ls) y Labiale Inferius (li).
Figura 1.1: Puntos característicos del complejo facial para una vista frontal.
Vista lateral del rostro.
Para el complejo Facial, visto lateralmente, se tienen los puntos característicos de las Figuras 1.2(a) y 1.2(b),
los cuales son: Glabela (g), Opistocráneo (op), Vértex (v), Preaural (pra), Postaural (pa), Supraauricular (sa),
Subauricular (sba), Punta Nasal (prn), Sellión (m) y Pogonión (pg) [7].
1.1.2. Medidas de superficie
En las seis regiones del complejo facial (cabeza, cara, ojos, nariz, labios y boca, y orejas), se han descrito
150 medidas lineales y angulares [18], y 155 índices de proporción [19]. El índice de proporción indica la
relación entre dos medidas o más. Las medidas básicas de cada región ayudan a determinar las proporciones
generales de una región en particular (Tabla 1.1).
Para el establecimiento de las medidas faciales se tienen las líneas de referencia vertical y las líneas de
referencia horizontal, algunas de las cuales pueden ser observadas en la Tablas 1.2 y 1.3.
6Capítulo 1. Antropometría Médica Facial
(a) Vista lateral. (b) Región de la oreja.
Figura 1.2: Puntos característicos del complejo facial.
Región Nombre de la Medida y Abreviatura
Anchura de la cabeza (eu-eu), longitud de la cabeza (g-op), altura de la cabeza
Cabeza
(v-n).
Cara Anchura facial (zy-zy), altura facial (n-gn).
Anchura Intercantal (en-en), anchura biocular (ex-ex), longitud de las fisuras
Ojos
palpebrales derecha e izquierda (ex-en).
Anchura de la nariz (al-al), altura de la nariz (n-sn), protrusión de la punta
Nariz
nasal (sn-prn).
Altura del labio superior (ls-sto), altura del labio inferior (sto-li), anchura de la
Labios y Boca
boca (ch-ch).
Anchura de las orejas izquierda y derecha (pra-pra), longitud de las orejas
Orejas
izquierda y derecha (sa-sba).
Tabla 1.1: Medidas básicas propuestas en seis regiones del complejo craneofacial.
1.2. Técnicas para el Estudio Antropométrico Facial
1.2.1. Antropometría directa
En la antropometría directa, las medidas se toman directamente en la superficie de la cabeza y la cara.
La compleja superficie de la cara requiere un gran número de medidas incluyendo la determinación de la
proyección y las distancias lineales tangenciales (medidas en milímetros), las inclinaciones y los ángulos
(medidos en grados) [7].
Instrumentos antropométricos.
Las medidas antropométricas pueden ser obtenidas utilizando instrumentos como los presentados en la Fi-
gura 1.3, ellos son: Sliding caliper, Spreading caliper, Coordinate Caliper (Paralelómetro) y Attachable
Goniometer. Para realizar las medidas, ciertas precauciones deben ser tenidas en cuenta, por ejemplo, la
cabeza a ser medida debe conservarse en el plano horizontal Frankfurt (HF) [20]. Los puntos de medida
deben ser marcados antes de ser medidos.
7Capítulo 1. Antropometría Médica Facial
Tabla I
Altura Facial Total: Distancia existente entre la línea del pelo y
el mentón.
Altura de la Frente: Distancia existente entre la línea del pelo y
la glabela.
Tabla 1.2: Medidas de acuerdo a la línea de referencia vertical.
Figura 1.3: Sliding Caliper, Spreading Caliper, Coordinated Caliper, y Attachable Goniometer.
1.2.2. Fotogrametría 2D
Esta técnica se basa en la realización de las medidas a partir de las imágenes o fotografías bidimensionales
(2D) de los pacientes. En cirugía plástica reconstructiva, la documentación fotográfica es tan importante
como los datos cuantitativos obtenidos de las medidas del esqueleto o de los tejidos blandos del complejo
craneofacial [7]. Con estas técnicas de fotografía, las siguientes medidas han cobrado importancia:
Angulos. Seis ángulos del perfil facial pueden medirse con fiabilidad si las fotografías proporcionan con-
tornos claros de las líneas de perfil facial.
Inclinaciones. Las medidas pueden tomarse de la frente, cara superior, cara inferior, mandíbula y línea de
perfil general de la cara.
Algunas distancias de proyección lineal se pueden obtener de la siguiente forma:
1. Cara: Vista frontal, altura de la cara superior (n-sto).
2. Ojos: Vista frontal, anchura intercantal (en-en); vista lateral, altura de la fisura palpebral (ps-pi) y
altura ojo-ceja combinada (or-sci).
3. Nariz: Vista frontal, altura nasal (n-sn); vista lateral, longitud de la columnella (sn-c).
8Capítulo 1. Antropometría Médica Facial
Distancia Interpupilar (DIP): Distancia entre los centros de am-
bas pupilas con los ojos mirando directamente hacia adelante.
Anchura de la Abertura Palpebral: Distancia existente entre la
comisura interna y externa de cada ojo.
Distancia entre Comisuras Externas - Distancia Biocular:
Distancia existente entre las comisuras externas de ambos ojos.
Distancia entre comisuras Internas - Distancia Intercantal:
Distancia existente entre las comisuras internas de ambos ojos.
Ancho de la Boca (En Reposo): Distancia entre uno y otro quei-
lión.
Arco de Cupido: Distancia entre las columnelas del philtrum a
nivel del labio superior.
Tabla 1.3: Medidas de acuerdo a la línea de referencia horizontal.
4. Boca y Labios: Vista frontal, anchura bucal (ch-ch), anchura del filtro (cph-cph), altura vertical lateral
derecha e izquierda del labio superior (sbal-ls); vista lateral, altura del labio superior (sn-sto) y altura
del bermellón inferior (sto-li) [6].
1.2.3. Antropometría facial con imágenes tridimensionales (3D)
Durante los últimos años, el uso de imágenes tridimensionales en aplicaciones relativas con el rostro humano
se ha incrementado, especialmente por la disponibilidad de estas tecnologías después de más de 20 años de
investigación [8]. Sin embargo, el mayor número de estos trabajos se ha orientado a la identificación de
rostros [1–3], posiblemente por el gran número de aplicaciones comerciales y en seguridad. A continuación,
presentaremos una revisión bibliográfica de los trabajos que están relacionados, de una u otra forma, con la
antropometría facial mediante el uso de datos 3D.
En [11] se evaluó el potencial de los sensores 3D con luz estructurada para la realización de medidas de la
geometría del rostro humano. El objetivo era crear modelos virtuales del rostro humano, a partir de datos 3D
obtenidos al numerizar el rostro de los sujetos, y caracterizar la precisión de tales medidas. Se concluyó que
la calidad de los datos 3D es suficiente para la realización de medidas con propósitos antropométricos. Sin
embargo, las medidas que se realizaron estaban orientadas hacia la geometría del rostro. Adicionalmente,
los puntos en los datos 3D utilizados para las medidas, se seccionaban manualmente y no de forma auto-
mática. Otro trabajo cuyo objetivo fue el estudio de la precisión de los captores 3D, que utilizan tecnología
laser, para aplicaciones en antropometría, es el presentado en [12]. Este trabajo también concluyó que esta
tecnología tiene un alto potencial para el desarrollo de aplicaciones en antropometría facial.
9Capítulo 1. Antropometría Médica Facial
Tal vez el único trabajo, a nuestro conocimiento, directamente relacionado con la antropometría facial, es
el presentado por Ghoddousi et al [9]. El objetivo del trabajo fue comparar tres métodos diferentes de rea-
lizar medidas faciales: antropometría manual, fotogrametría 2D y estereofotogrametría 3D. Los resultados
obtenidos con el método utilizando estereofotogrametría, mostraron ser comparables con los obtenidos por
el método de antropometría manual. Esto no sucedió con el método de fotogrametría 2D, que arrojó medi-
das más alejadas. En este trabajo, se pusieron marcas en los rostros de los sujetos numerizados, para poder
obtener las medidas por el tercer método. El sistema para las medidas tridimensionales utilizó dos conjuntos
de tres camaras CCD sincronizadas, para la captura de la imagen. Sin embargo, como ya se mencionó, los
sistemas que utilizan luz estructurada o tecnología laser, para obtener la información 3D, pueden arrojar re-
sultados más precisos que los obtenidos en este trabajo, que obtiene la información 3D a partir de múltiples
imágenes 2D.
En [21] se presenta un estudio que examina y compara las superficies faciales de niños con y sin labio y/o
paladar endido. Las superficies son obtenidas mediante un sistema de adquisición que utiliza tecnología
laser. Las medidas utilizadas para la comparación se obtienen seleccionando, manualmente, puntos sobre
las superficies digitales. En el trabajo presentado en [22], se propone un algoritmo que, si bien es utilizado
para el reconocimiento de rostros, hace un análisis interesante de ciertas medidas alrededor de la nariz y
los ojos. Los puntos utilizados para estas medidas son obtenidos automáticamente, a partir de los datos 3D.
Un trabajo que hace un análisis biométrico de las orejas es presentado en [23, 24], pero las medidas son
utilizadas para identificación de rostros y no para análisis antropométrico. La obtención de las medidas es
realizado de manera automática, utilizando la forma 3D de las orejas.
1.3. Análisis Antropométrico Facial
Siendo el objetivo de este trabajo hacer una propuesta metodológica para realizar un análisis antropométrico
facial, utilizando imágenes tridimensionales, nos concentraremos en el estudio antropométrico de la región
de la boca. Es importante anotar que se ha seleccionado esta región del rostro, por la importancia e impacto
social que tiene la reconstrucción quirúrgica de los labios y su posterior control, en niños con labio y/o
paladar hendido corregido.
En la reconstrucción quirúrgica de los labios, uno de los factores más importantes para evaluar los resulta-
dos de la intervención, es la estética [25]. Desafortunadamente, existe un gran número de características que
deben ser consideradas para lograr una evaluación objetiva [6, 7, 25–27]. En este trabajo nos centraremos en
el análisis del contorno externo de los labios, mediante la obtención de un conjunto de características que
son consideradas como buenas descriptoras de la morfología de la boca (ver la Figura 1.4). Adicionalmente,
consideraremos la característica conocida como concavidad del arco de Cupido. Las medidas serán obteni-
das proporcionalmente al ancho de la boca.
Este conjunto de características está orientado a establecer asimetría en las medidas, debido a la relevancia
de esta asimetría, para establecer la calidad de la reconstrucción quirúrgica [28].
10Capítulo 1. Antropometría Médica Facial
Característica
F tml Ancho del Philtrum
Cba Arco de Cupido
Ls Contorno del labio superior
Vx Vértices
Ml Ancho de la boca
Mh Alto de la boca
Li Controno del labio inferior
Figura 1.4: Características consideradas para el análisis antropométrico de la región de la boca.
11Capítulo 1. Antropometría Médica Facial
12Capítulo 2
Calibración de Cámara
La antropometría facial en este trabajo se desarrolla empleando múltiples imágenes 2D para obtener, me-
diante el método de triangulación, la información 3D. Por tal razón, la adquisión de imágenes será bá-
sicamente bidimensional. La adquisición de imágenes faciales es, dentro del procesamiento digital de la
imagen, una etapa que requiere mucho cuidado, ya que de sus condiciones y resultados depende el costo
computacional y la eficiencia de las etapas subsiguientes, y en particular de una buena extracción de carac-
terísticas faciales.
La cámara es la herramienta principal para conseguir la información 3D en la visión por computador. La
visión basada en los sistemas con cámara deben determinar los parámetros de esta, mediante el proceso de
calibración. La calibración de cámara es especialmente crucial para los usos que implican métricas cuan-
titativas a partir de una imagen, tales como medidas dimensionales, profundidad, antropometría facial o
movimiento de las mismas. El proceso busca determinar las características geométricas y ópticas, junto con
la posición y orientación en el mundo, para establecer la conexión entre la posición del píxel de la imagen y
un punto de la escena. Presentaremos a continuación el modelo de cámara pinhole (Sección 2.1). Además,
se estudian dos métodos de calibración de cámara a partir de correspondencias R3 → R2 y un método
que utiliza propiedades geométricas (Sección 2.2). Finalmente, presenta la implementación y los resultados
(Sección 2.3).
2.1. Modelo de Cámara
Una cámara realiza una transformación R3 hacia R2 , donde un conjunto de puntos en el espacio (x) es
mapeado a un punto en un plano (X). El modelo de cámara más utilizado para estimar la transformación
es el modelo pinhole (Figura 2.1). Donde (xw , yw , zw ) es el sistema 3D coordenado del mundo, (x, y, z) es
el sistema 3D coordenado de la cámara, C es el centro de proyección llamado centro de cámara o centro
óptico y el plano de la imagen es el plano focal donde la componente de profundidad z es igual a la distancia
focal f . Esta transformación de espacios R3 → R2 está determinada por los parámetros, tanto extrínsecos
como intrínsecos, de la cámara. Los parámetros extrínsecos determinan la transformación de cuerpo rígido
del espacio coordenado del mundo al espacio de la cámara (Ecuación 2.1).
x xw
y = R yw + T (2.1)
z zw
donde, R (θx , θy , θz ) es la matriz de rotación y T (tx , ty , tz ) es el vector de traslación. La transformación
desde el sistema 3D coordenado de la cámara (x, y, z) a la imagen (X, Y ), se rige por los parámetros
intrínsecos de la cámara. Una primera aproximación se presenta con una transformación de perspectiva,
13Capítulo 2. Calibración de Cámara
Figura 2.1: Modelo de Cámara.
establecida por la distancia focal (Ecuación 2.2).
X = f x/z
(2.2)
Y = f y/z
Sin embargo, una cámara CCD sugiere la utilización de un modelo más completo, que reúna información
de la fabricación de la cámara y del sensor CCD. De esta forma, la transformación está determinada por la
Ecuación 2.3.
x
X f mx 0 mx px 0
Y = 0 y
f my my py 0
z (2.3)
1 0 0 1 0
1
donde,
f : es la distancia focal.
mx , my : son el número de píxeles por unidad de distancia.
px , py : las coordenadas del punto principal en la imagen.
No obstante, cada método de calibración presenta su propio acercamiento de los parámetros intrínsecos; por
esta razón, serán tratados más a fondo en la Sección 2.2.
14Capítulo 2. Calibración de Cámara
2.2. Métodos de Calibración
Existen diferentes métodos para realizar el cálculo de los parámetros de la cámara. Las técnicas más comu-
nes usan un conjunto de puntos correspondientes entre la imagen y el mundo real, mientras otras utilizan las
propiedades geométricas de los elementos proyectados en la imagen.
2.2.1. Método 1: algoritmo Tsai
El método fue presentado por Tsai [29,30], su mayor ventaja es que tiene en cuenta la información de la dis-
torsión radial. Sin embargo, la principal desventaja es que utiliza datos propios de manufactura de la cámara
que normalmente no vienen especificados por el fabricante. Estos datos los utiliza para hallar la distancia
focal f , y el factor de incertidumbre de escala sx .
El acercamiento de los parámetros intrínsecos de la cámara y la transformación desde el sistema 3D coor-
denado de la cámara (x, y, z) a la imagen (X, Y ), está descrito por la transformación de perspectiva (Ecua-
ción 2.2), seguido de la distorsión radial (Ecuación 2.12, Ecuación 2.15). Finalmente, tiene en cuenta los
parámetros de fabricación de la cámara, como lo muestra la Ecuación 2.4.
X f = sx (Nf x /dx Ncx )X d + Cx
(2.4)
Y f = (1/dy )Y d + Cy
donde,
(Cx , Cy ): son el número de filas y columnas del centro de la imagen.
(dx , dy ): es la distancia, de centro a centro, entre elementos adyacentes del sensor en la dirección X
y Y respectivamente.
Nc x: es el número de elementos del sensor en la dirección X.
Nf x: es el número de píxeles de la imagen en la dirección X.
sx : es el factor de incertidumbre en la escala de la imagen.
2.2.2. Método 2: algoritmo The Gold Standard
Este algoritmo es una mejora del algoritmo DLT (Trasformación Lineal Directa), desarrollado por Abdel-
Aziz y Karara [31]. Este método supone que la óptica de la cámara es perfecta y no tiene en cuenta ningún
tipo de la distorsión. Para estimar el modelo de la cámara, sólo basta con calcular la matrix P que mapea el
espacio 3D x, a la imagen 2D X (Ecuación 2.5).
X = Px (2.5)
La matriz P para una cámara finita está representada por:
h i h i
P = K R | T = K R | −RC e = M | −MC
e (2.6)
donde, K es la matriz de calibración de la cámara, la cual define los parámetros internos de la misma
(Ecuación 2.7).
αx s X0
K= 0 α y Y0 (2.7)
0 0 1
15Capítulo 2. Calibración de Cámara
donde,
αx y αy : es el factor de escala en la dirección de la coordenada X y Y respectivamente.
s: es el skew, inclinación del sensor (normalmente 0).
(X0 , Y0 )T : son las coordenadas del punto principal.
Las matrices K y R son halladas a través de la descomposición matricial RQ de la matriz M. La des-
composición RQ, encuentra dos matrices, tal que R sea una matriz triangular superior y Q sea un matriz
normalizada. Además, es posible inferir el centro de cámara C = [Cx , Cy , Cz , Ct ]0 , el cual está dado por:
Cx = det([p2 |p3 |p4 ]) Cy = − det([p1 |p3 |p4 ])
Cz = det([p1 |p2 |p4 ]) Ct = − det([p1 |p2 |p3 ])
C̃ es obtenido a partir de C homogéneo como C̃ = [x/t, y/t, z/t].
El cálculo de la matriz P (Algoritmo 1), se realiza seleccionando el mayor número de puntos correspon-
dientes (mínimo 6), entre la imagen planar y el espacio tridimensional. Por este motivo, y por facilidad de
cálculo, se utilizó un patrón de calibración para establecer dichas correspondencias.
Algoritmo 1 The Gold Standard [32].
Requiere: n > 6 de correspondencia entre Xi . → xi
Salida: Matriz P .
Paso 1 Normalización: hallar las matrices de normalización T y Q, de cada uno de los n puntos X y x,
respectivamente. Normalizar las coordenadas en cada uno de los espacios de forma independiente y hallar
X y x.
Paso 2 DLT: para cada correspondencia Xi → xi , construir la matriz Ai . Construir la matriz A de
(2n × 12) a partir de las n matrices Ai . Obtener la descomposición en valores singulares de A. El vector
singular asociado al menor valor singular, será la solución p. La matriz P se determina a partir de p por
filas.
P
1
0 yi XiT
T
−xTi
Ai = = P2
xTi 0T −xi XiT
P3
Paso 3. Minimización del error geométrico: usando la estimación lineal como punto inicial, se minimiza
2
el error geométrico: d Xi , Pxi , sobre P. Se utiliza un algoritmo iterativo.
P
i
Paso 4. Desnormalización: P = T−1 PQ.
Matrices de normalización.
Para este caso en particular, cabe aclarar que√la normalización para√las coordenadas espaciales debe ser tal
que: la mayor distancia en el espacio (x) sea 3 y en el plano (X) 2. Esta normalización es realizada para
evitar el problema computacional de las matrices dispersas (Algoritmo 2).
16Capítulo 2. Calibración de Cámara
Algoritmo 2 Cálculo de las matrices normalización (T y Q).
Requiere: Nube de puntos x o X.
Salida: Matrices de Normalización T y Q.
Paso 1. Sea en x o X se calcula la media de cada una de la componentes.
Paso 2. Hallar la máxima distancia euclídea entre la media y toda la nube de puntos.
Paso 3. Calcular la matriz de normalización:
" # 1 0 0 −xmean
1 1 0 −X mean
1 0 1 0 −ymean
T= 0 1 −Zmean Q=
dmáx 0 0 dmáx 0 0 1 −zmean
1
0 0 0 1
2.2.3. Método 3: calibración de cámara basado en elipses
Este método de calibración utiliza las propiedades geométricas que presenta una cónica o una cuádrica en
el espacio, proyectada sobre la imagen, donde la cónica a estudiar será una elipse. Un primer acercamiento
lo realiza Tarel [33] y Daucher [34]. Una de las ventajas de este método es que los contornos de las elipses
pueden encontrarse con mayor precisión a comparación de los puntos correspondientes.
El acercamiento de los parámetros intrínsecos de la cámara y la transformación desde el sistema 3D coor-
denado de la cámara (x, y, z) a la imagen (X, Y ), está descrita por las Ecuaciones 2.3 y 2.1.
Caracterización de la elipse.
De manera general, toda cónica puede ser representada por una ecuación implícita, como la mostrada en la
Ecuación 2.8.
AX 2 + 2BXY + CY 2 + 2DX + 2EY + F = 0 (2.8)
De igual forma, la ecuación implícita (Ecuación 2.8) se puede representar de forma matricial (Ecuación 2.9),
con el fin de tenerla en coordenadas homogéneas.
A B D X
X Y 1 B C E Y = [X]T [C] [X] = 0
(2.9)
D E F 1
Sobre cada elipse se determina el borde, utilizando alguna técnica de contorno. Para cada píxel que pertenece
al borde, se normaliza con una matriz T (Xb = TX ) y se genera el vector A b i (Ecuación 2.10). Por último, se
soluciona la matriz A, compuesta por vectores Ai , utilizando descomposición de valores singulares (SVD).
b b
A
b
Bb
i C
h
= Ai [X] = 0
b
X
b2 X
bi Ybi Yb 2 X
bi Ybi 1 (2.10)
i i Db
E
b
Fb
Al utilizar la solución por SVD, se asegura la mejor elipse que minimiza el error cuadrático medio. A
continuación, se desnomarliza la solución, utilizando la Ecuación 2.11.
17Capítulo 2. Calibración de Cámara
A B D A
b B
b D
b
B C E = |T|T
B
b C
b E |T|
b (2.11)
D E F D E F
b b b
La proyección de la cónica C de la imagen en el espacio, a partir de una matriz de cámara P, da como
resultado una cónica en un plano infinito, comúnmente llamada cónica absoluta o cuádrica cónica Qco (Fi-
gura 2.2).
El cálculo de los parámetros de cámara se determina utilizando el Algoritmo 3, utilizando la caracterización
de cada elipse.
PCPT = Qco
Figura 2.2: Proyección de una cónica en el espacio.
2.2.4. Modelo de cámara con distorsiones
El modelo presentado en la Sección 2.1, supone que la óptica de los lentes de la cámara es perfecta. Sin
embargo, en general los lentes presentan defectos de dos tipos: cromáticos y geométricos [35]. Los defectos
geométricos describen la divergencia entre las posiciones observadas e ideales de la imagen de un punto del
espacio y están representados por la Ecuación 2.12.
X d = X + δX (X, Y )
(2.12)
Y d = Y + δY (X, Y )
donde,
X d , Y d : son las coordenadas correspondientes actuales, con distorsión.
X , Y : son las coordenadas ideales.
δ (X, Y ): es la función de distorsión.
En general se consideran tres tipos de distorsiones geométricas [36]. Estas distorsiones son representadas
por series numéricas, las cuales deben ser acotadas para su posible implementación y estabilidad. La primera
distorsión es el descentrado de los lentes con relación al eje principal, descrita por la Ecuación 2.13.
18Capítulo 2. Calibración de Cámara
Algoritmo 3 Calibración basado en elipses.
Requiere: Imagen Segmentada
Para i = 1 hasta NElipses Haga
Paso 1. Cálculo de la cónica en el espacio Qa bs
1 0 0
−xi
0 1 0 −yi
Qi = |R| R
T
0 0 0 −zi
−xi −yi −zi x2i + yi2 + zi2 − r2
donde, R es una matriz de rotación del patrón de calibración.
Paso 2. Caracterización de las elipsesi .
A B D
Ci = B C E
D E F
Paso 3. Calcule P tal que:
mı́n PCi PT − Qi
Fin Para
h i
δXd = p1 3X 2 + Y 2 + 2p2 XY + O (X, Y )4
h i (2.13)
δY d = 2p1 XY + p2 X 2 + 3Y 2 + O (X, Y )4
La distorsión provocada por pequeñas desviaciones entre el paralelismo de los lentes, producida en la manu-
facturación de la cámara, se debe tener en cuenta. Este tipo de distorsión se puede modelar adecuadamente
por la adición de un prisma fino al sistema óptico, causando cantidades adicionales de distorsiones radiales
y tangenciales, descritas por la Ecuación 2.14.
h i
δXp = s1 X 2 + Y 2 + O (X, Y )4
h i (2.14)
δY p = s2 X 2 + Y 2 + O (X, Y )4
El tercer tipo de distorsión, es la distorsión radial (Ecuación 2.15), causada por la propiedades ópticas de
los lentes. Este tipo de distorsión es, generalmente, más importante que las distorsiones anteriores y más
significativa en cuanto a magnitud.
h i
δXr = k1 X X 2 + Y 2 + O (X, Y )5
h i (2.15)
δY r = k2 Y X 2 + Y 2 + O (X, Y )5
2.2.5. Corrección de la distorsión radial: algoritmo The Gold Standard
Aunque este método no tiene en cuenta la distorsión radial de los lentes, como el método de Tsai (Sección
2.2.1), en este trabajo se presenta una etapa adicional para la corrección de dicha distorsión al inicio del
algoritmo ya presentado. La corrección se realiza sobre cada uno de los puntos de la imagen, con una
valor de κ determinado, utilizando el Algoritmo 4, el cual se presenta a continuación. Además, es necesario
19Capítulo 2. Calibración de Cámara
conocer el tamaño del sensor y la resolución de la imagen a corregir, para realizar la transformación de
coordenadas de la imagen al sensor y visceversa.
Algoritmo 4 Corrección radial.
Requiere: Nube de puntos Xd , Yd y Coeficiente de Distorsión κ.
Salida: Nube de puntos Xu , Yu .
Variable Xu , Xu {n puntos corregidos}
Para i = 1 hasta n Haga
Pasar a Coordenadas del Sensor (Xd , Yd ) → (Xd∗ , Yd∗ )
Si (Xd∗ = 0 y Yd∗ = 0) o κ = 0 Entonces
Xu∗ = Xd∗ , Yu∗ = Yd∗
Si no q
Ru = Xd∗2 + Yd∗2 , c = 1/κ, d = −c ∗ Ru Q = c/3, R = −d/2, D = Q3 + R2
Si D >= 0 Entonces
{Solo tiene una Raíz} √ √
Hacer D = sqrt(D), S = 3 R + D , T = 3 R − D , Rd = S + T
Si Rd < 0 Entonces
Este punto está fuera del sensor
Fin Si
Si no
{Selección de la Raíz positiva√
más pequeña} √
Hacer D = sqrt(−D), S = 6 R2 + D2 , T = atan(D/R)/3 Rd = −S ∗ cos(T ) + 3 3 ∗ s +
sen(T )
Fin Si
Fin Si
Pasar a Coordenadas de la Imagen (Xu∗ , Yd∗ ) → (Xu , Yu )
Fin Para
2.3. Resultados
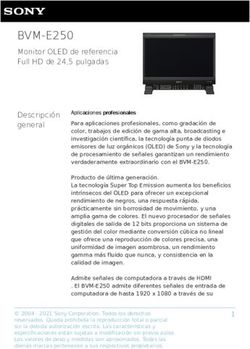
El patrón de calibración (Figura 2.3) consiste en dos láminas unidas formando un ángulo de 90 entre ellas.
El fondo de la lámina es de color blanco para lograr un alto contraste entre las figuras y el fondo. El Patrón 1
(Figura 2.3(a)), contiene una serie de cuadrados negros de 2 × 2 cm, separados entre ellos 2cm. El Patrón 2
(Figura 2.3(b)), contiene una serie de círculos negros de diámetro 3cm, separados 4cm entre centro y centro.
El Patrón 1 se utilizó para el método Tsai y The Gold Standard, mientras que el Patrón 2 se utilizó para el
método basado en elipses.
Las cámaras CCD a calibrar son: Canon EOS Digital Rebel EF-S 18-55 cuyas características se observan en
la Tabla 2.1 y la cámara Web Genius VideoCam Messenger cuyas características se observan en la Tabla 2.2.
Las imágenes fueron adquiridas con la mayor resolución disponible, en formato RAW y un nivel de calidad
muy fino para la cámara Canon, y para la cámara Genius en formato JPEG nivel de calidad estándar.
20También puede leer