Caracterización MEF/Metrología Láser de la Cinemática de Robot Manipulador Articulado con Elementos Flexibles
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación
146
Encuentro de Investigación en IE, 5 — 7 de Abril, 2006
Encuentro de Investigación en Ingeniería Eléctrica
Zacatecas, Zac, Abril 5 — 7, 2006
Caracterización MEF/Metrología
Láser de
la Cinemática de Robot Manipulador
Articulado con Elementos Flexibles
Carlos Humberto Saucedo Zárate1,2, Jorge Huerta Ruelas1, Carlos Sánchez López2
1
CICATA-Qro IPN, Querétaro. Qro. CP-76047
2
Metal Mecánica, Instituto Tecnológico de Aguascalientes,
Aguascalientes, Ags. CP-20256
TEL: +(449) 9105002 Ext. 104,
correo-e: carloshum777@yahoo.com, jorgecicata@yahoo.com
Resumen — El objetivo global de esta investigación es el elemento finito, obteniéndose una simulación de su
desarrollar un modelo matemático, utilizando teoría de estado esfuerzo-deformación.
elasticidad para representar, simular o predecir los
efectos que resultan de aplicar elementos mecánicos, Abstract — The main objective of this research is to
cuyo comportamiento se ha supuesto clásicamente como develop a mathematical model using theory of elasticity,
cuerpo rígido. Se desarrolla el modelo cinemático del to represent, simulate or predict the effects of applying
manipulador Scorbot ER V Plus en base a la propuesta mechanical elements, whose behavior has been supposed
paramétrica de Denavit y Hartenberg. Las ecuaciones usually as rigid body. The manipulator's cinematic
de movimiento resultantes se evaluarán en una segunda pattern Scorbot ER V Bonus is developed based on the
etapa con el software MathCad™ con las constantes proposed parametric model of Denavit and Hartenberg.
físicas del Scorbot y se utilizará un banco experimental The resulting movement equations will be evaluated in a
de cadenas cinemáticas para generalizar los resultados. second part, in the software MathCad™ with the
Aplicando teoría del medio continuo en la physical constants of the Scorbot and on an
caracterización de eslabones y articulaciones se propone experimental bank of cinematic chains to generalize the
incluir dos tipos de deformaciones elásticas que results. Applying theory of the continuous solid in links
provocan un cambio de posición espacial del efector and articulations, the characterization intends to include
final que difiere de lo previsto por el modelo de cuerpo two types of elastic deformations which cause a change
rígido. Se cuenta con modelos geométricos del Robot of space position of the final efector that differs of that
manipulador Scorbot en los software predicted by the pattern of rigid body. Robot
MechanicalDesktop™, SolidWorks™ y ANSYS™. Geometrical models for Scorbot Robot have been
Paralelamente se ha determinado el diseño experimental developed in MechanicalDesktop™, SolidWorks™ and
de análisis de vibración y de esfuerzo/deformación ANSYS™. Parallelly the experimental design has been
extensiométrico seleccionando tecnología de NI™ para determined for vibration and strain/deformation
la adquisición, acondicionamiento de señales y analysis selecting technology of NI™ for signal
procesamiento de datos, sentando las bases de una acquisition and data processing, using this as first step
segunda etapa experimental. Se plantean dos for a second experimental phase. Two possibilities
posibilidades para la implementación de un sistema consider the implementation of external systems based
externo de Metrología basado en Láser que permita on a Laser beam that will allow accurately, verify the
verificar con precisión la posición final del efector en el final position of the efector in the robot deformed.
robot deformado. Se presenta aquí la etapa inicial
concerniente en el modelado del Scorbot ER V plus en
147
Encuentro de Investigación en IE, 5 — 7 de Abril, 2006
We present the initial stage in the modeled Scorbot ER el diseño de este tipo de mecanismos y permita
V plus by finite element method, obtaining a simulation mejorar el control de los mismos.
of its strain/deformation state. El Objetivo es desarrollar un modelo simbólico /MEF
sobre la Dinámica de cadenas cinemáticas abiertas,
Palabras clave — Cinemática directa e inversa, eslabonadas con articulaciones tipo revoluta, que
elasticidad, flexión, grados de libertad, robots incluya fenómenos de deformación elástica tanto en
manipuladores articulados, torsión. sus elementos de articulación, como en sus elementos
de interconexión, y contemple sus propiedades
I. INTRODUCCIÓN cinemáticas bajo perturbación. El fenómeno de
perturbación a incluir es: Campo Gravitacional; G.
S e empieza a detectar mucha actividad de
investigación a mediados de los años 1980 sobre
la naturaleza elástica que presentan los sistemas
Los Parámetros de estudio a incluir son: Fuerzas
estáticas, deformación de elementos y de conjunto,
mecánicos, especialmente mecanismos usados en posición espacial relativa de elementos del
mecanismo abierto.
robots. Inicialmente se proponen los procedimientos
para resolver la dinámica del robot, incluyendo tanto a
la dinámica directa como la dinámica inversa [1]. II. FUNDAMENTOS TEÓRICOS.
Incluso se han desarrollado aproximaciones de
dinámica de Lagrange para el diseño de
manipuladores sencillos consistente en sólo dos Sc El Robot Scorbot ha sido modelado en
eslabones flexibles y dos articulaciones rotatorias. Sin MechanicalDesktop™ y en SolidWorks™ a partir de
embargo, las ecuaciones fueron simplificadas la medición directa de sus dimensiones permitiendo
despreciando efectos de gravedad y amortiguamiento realizar cálculos de propiedades de cada elemento a
estructural, y suponiendo solo deflexiones muy analizar, tales como; volumen del sólido, centroides,
pequeñas [6]. momentos de inercia, productos de inercia, entre
Una aproximación por mecánica de Lagrange se otros. Estos datos son útiles al modelar en CAE ya
desarrolló para la dinámica de una cadena de que diversas constantes reales son solicitadas por el
eslabones flexibles. Cada eslabón fue modelado como software durante la simulación.
un sistema con un número finito de grados de libertad La siguiente transformación homogénea es desde el
[7]. sistema de referencia 5, último grado de libertad,
Al igual que en la literatura, se hace uso de la hasta el sistema de referencia fijo 0, de la base [1].
simulación, herramienta alternativa más accesible [2]
TE = 0T1 1T2 2T3 3T4 4T5 5TE
0
[3] [4]. (1)
Se puede observar el interés por un lado, en modelar
cadenas cinemáticas elásticas y por el otro el interés
en tratar de controlar esos efectos perjudiciales o nx sx ax px
indeseables suprimiéndolos o eliminándolos en n sy ay py
0
T5 = T1 T2 T3 T4 T5 = y
0 1 2 3 4
tiempo real a través de técnicas nuevas de control.
nz sz az pz
Experimentalmente se ha demostrado que los efectos 0 0 0 1
elásticos han provocado desviaciones que los modelos
(2)
de cuerpo estrictamente rígido no predicen con
exactitud.
donde:
Con la teoría mecánica clásica, aunada a la teoría de
elasticidad, y la posibilidad de aplicar actualmente
con facilidad el método de elementos finitos (MEF) n z = − s 23 (c 4 c 5 − s 4 ) − c 23 s 5
para simulación estructural y con disponibilidad de la
experimentación extensiométrica y metrología láser, s x = c1 (− c23 (c4 c5 + s 4 ) + s23 s5 ) − s1 (− s 4 c5 + c4 )
se manifiesta la posibilidad de construir un modelo
matemático que describa o contemple los fenómenos s y = s1 (− c23 (c4 c5 + s4 ) + s 23 s5 ) + c1 (− s 4 c5 + c 4 )
de deformación elástica provocada por el peso de los
propios elementos constituyentes de el mecanismo sz = s 23 (c 4 c 5 + s 4 ) − c 23 s 5
abierto, sus posiciones relativas y la carga útil a
mover. De manera que este modelo permita auxiliar ax = c 1 (c 23 c 4 s 5 + s 23 c 5 ) − s 1 s 4 s 5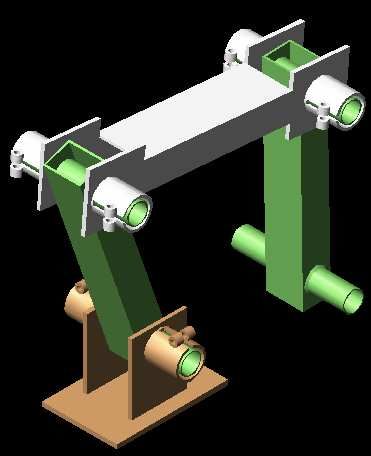
148
Encuentro de Investigación en IE, 5 — 7 de Abril, 2006
ay = s 1 (c 23 c 4 s 5 + s 23 c 5 ) + c 1 s 4 s 5 Conviene descomponer la deformación E(n) en una
componente longitudinal ε (elongación) paralela a
a z = − s 23 c 4 s 5 + c 23 c 5 ) “n” que se suele llamar γ / 2 . Tales componentes se
calculan por medio de las fórmulas:
p x = c1 ((c23c4 s5 + s23c5 ) + s23 d 4 + a2 c2 ) − s1 (s4 s5 )
p y = s1 ((c23c4 s5 + s23c5 ) + s23d 4 + a2c2 ) + c1 (s4 s5 ) ( )
ε =l ε +m ε +n ε + 2 l mεxy + m nεyz + n lεzx (8)
2 2 2
p z = (c 23 c5 − s 23 c 4 s 5 ) + c 23 d 4 − a 2 s 2
x y z
γ = + + −
2
(3).
P Q R ε
2 2 2 2
2 (9).
El tensor de las deformaciones es: Se cuenta con la expresión analítica según (2) y (3)
del modelo correspondiente al Scorbot ER V Plus en
E (i ) = ε x i + ε xy j + ε xz k parámetros de D-H, estrictamente con modelo de
E ( j ) = ε yx i + ε y j + ε yz k cuerpos rígidos. Con base en la mecánica del medio
E (k ) = ε zx i + ε zy j + ε z k
continuo se propondrán modelos para incluir los
efectos elásticos tanto de articulaciones como de
(4). eslabones, introduciéndolos en la cinemática de D-H
[1]. Las deformaciones serán medidas por técnicas
La matriz del tensor de las deformaciones es: Extensiométricas con tecnología NI™. Estos datos
experimentales posteriormente retroalimentarán el
modelo analítico cinemático junto con los resultados
∂δ x 1 ∂ δ y ∂ δ x 1 ∂δ z ∂δ x por simulación MEF.
+ +
∂x 2 ∂x ∂y 2 ∂x ∂z
[E ] = 1 δ x + δ y
∂ ∂ ∂δ y 1 ∂δ z ∂δ y
+ III. RESULTADOS Y DISCUSIÓN.
2 ∂y ∂x ∂y 2 ∂y ∂z
1 ∂δ x ∂δ z 1 ∂ δ y ∂δ z ∂δ z
+ + De acuerdo al plan de trabajo se ha alcanzado la
2 ∂z ∂x 2 ∂z ∂y ∂z
caracterización Esfuerzo-Deformación para cada uno
de los elementos eslabón, contando con los modelos
(5). geométricos MEF, ANSYS™. Esta etapa inicial
permitirá contrastar estos resultados con los datos
experimentales de esfuerzo/deformación.
La aplicación del tensor E al vector unitario Posteriormente el modelado analítico se ajustará en
n = li + mj + nk da como resultado: una tercera etapa complementando el modelo actual
de D-H, con términos de “corrección” por
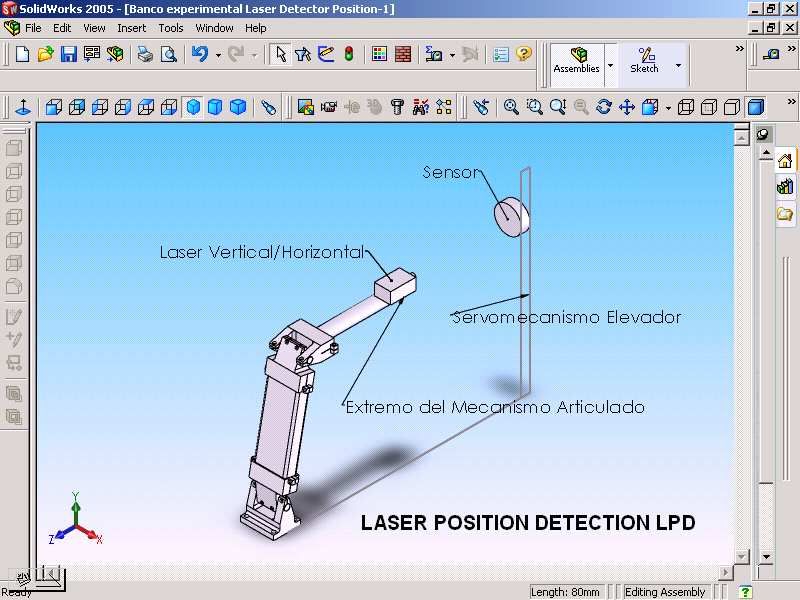
deformación. Finalmente las predicciones logradas
E (n) = Pi + Qj + Rk por el modelo analítico serán contrastadas con el
(6). sistema de Metrología Láser como testigo de
desempeño del modelo. Ver figuras 12 y 13.
MechanicalDesktop™ nos permite tener dibujos
Siendo: técnicos de definición de las piezas, con información
sobre acotaciones y tolerancias, vistas y detalles,
P =
además de poder construir el modelo geométrico
lε + m ε yx + n ε zx
x mismo que puede estudiarse desde el punto de vista
Q = lε xy
+ m ε y + n zy de sus propiedades de sólido. Ver las siguientes
R = + m ε yz + n ε z
lε xz figuras 1, 2, 3, 4 y 5, las cuales son Modelos 3D
(7). sólido, eslabones del Scorbot ER V Plus (ver figura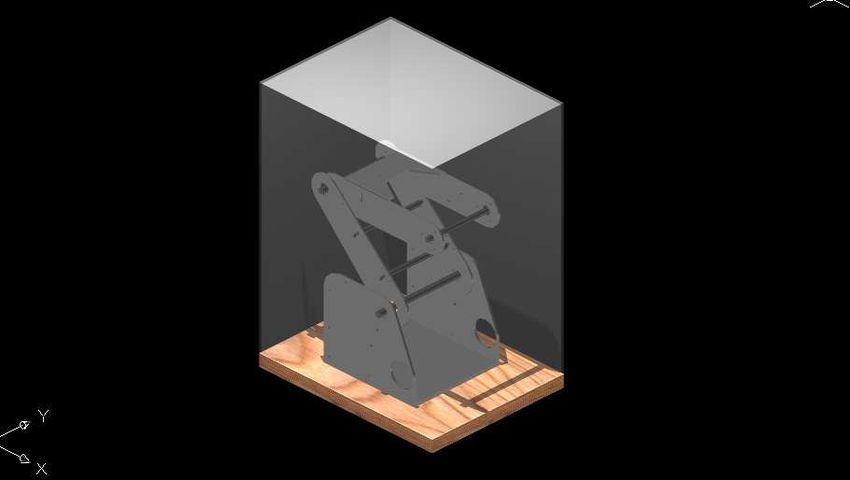
149
Encuentro de Investigación en IE, 5 — 7 de Abril, 2006
11), que fueron construidos a partir de mediciones
directas en el brazo manipulador.
Figura 1. Conjunto de elementos Eslabón
Figura 5. Ensamble sólido 3d y render con base de
Figura 2. Cara lateral, Primer eslabón madera y caja de cristal.
Ansys™ v.6 posee su propia plataforma de CAD,
menos amigable que el típico ambiente Windows,
pero se puede observar que es muy exigente en la
construcción y diferenciación de entidades, así que
trabajar en ella directamente es un seguro para
minimizar los rechazos por ambigüedades que podrían
presentarse usando archivos de exportación entre
ambas plataformas de software CAD/CAE.
En las figuras 6, 7 y 8, se muestran modelos sólidos
del Scorbot Er V Plus en CAE Ansys™.
Figura 3. Segundo eslabón (Par de ellos)
Figura 4. Tercer y penúltimo eslabón
Figura 6.
150
Encuentro de Investigación en IE, 5 — 7 de Abril, 2006
Figura 7.
Figura 9.
Figura 8.
La solución nodal Ansys™, permite observar
volúmenes de intensidad de esfuerzo identificados por
color, ver figura 8. Estos valores ahora pueden ser
contrastados en la etapa experimental de
extensiometría. Figura 11. Scorbot – ER V Plus
Esta primera etapa, usando un manipulador didáctico
(ver Figura 11), ha permitido ganar experiencia en el En las Figuras 12 y 13 se presentan esquemas de los
modelado MEF, pero los resultados deberán sistemas ópticos aplicables que se desarrollarán para
generalizarse a mecanismos abiertos considerando validar experimentalmente el modelo matemático.
algunas variaciones tanto geométricas como de
materiales de construcción.
Se trabaja sobre el diseño de un Banco Experimental
de Extensiometría (instrumentado NI™), con cadenas
cinemáticas reconfigurables, para la segunda etapa
experimental que tiene el fin de generalizar los
resultados a cualquier cadena cinemática articulada
con pares revoluta. Ver figura 9.151
Encuentro de Investigación en IE, 5 — 7 de Abril, 2006
AGRADECIMIENTOS
Este trabajo contó con el apoyo del Instituto
Tecnológico de Aguascalientes y el proyecto
“Montaje de instrumentos de medición ópticos para el
control de procesos industriales (PARTE 2)”
Coordinación General de Posgrado e Investigación del
IPN. Registro 20050743.
REFERENCIAS.
[1] J. Denavit and R.S. Hartenberg. A Kinematic
Figura 12. Sistema Láser Detector de Posición Notation for Lower-Pair Mechanisms Based on
Matrices. Journal of Applied Mechanics, pp. 215-
221, June (1985).
[2] Jonker, B, A finite element dynamic analysis of
spatial mechanisms with flexible links.
COMP. METHODS APPL. MECH. ENG., vol.
76, no. 1, pp. 17-40, 1989
[3] Farid, M; Lukasiewicz, SA. On dynamic
modeling of multi-link spatial manipulators with
flexible links and joints. ASME PRESSURE
VESSELS PIPING DIV PUBL PVP. Vol. 369,
pp. 211-220. ISSN 0277-027X. 1997.
[4] Tokhi, Mo; Mohamed, Z; Hashim, AW, Symbolic
Luz láser dispersa approach to dynamic characterisation of a
flexible manipulator using finite element
Figura 13. Sistema de luz láser dispersa methods. Shock and Vibration Digest [Shock VIB
Dig], vol. 32, no. 1, 24,ISSN 0583-1024, 2000.
[5] Chang, L-W, Dynamic analysis of robotic
IV. CONCLUSIÓN: manipulators with flexible links, Dissertation
Abstracts International Part B: Science and
Existe una amplia literatura donde se ve claramente Engineering [DISS.ABST. INT. PT. B - SCI. &
que los problemas de posicionamiento final, ENG.], vol. 46, no. 2, 189 pp, Order No. FAD
vibraciones, trayectorias son un tema en constante DA8507666., 1985.
evolución donde aparecen sofisticados conceptos de [6] J. C. Ower And J. Van De Vegte. Classical
control. El amplio despliegue de recursos Control Design For A Flexible Manipulator:
computacionales tanto en hardware como en software Modeling And Control System Design. IEEE
es típico en cada nueva propuesta, y siempre Journal Of Robotics And Automation, Vol.
basándose en un sencillo modelo de la planta o Ra-3, No. 5 , October 1987
modelo del sistema. [7] Benati, M; Morro.A . Dynamics of chain of
En un principio el conocimiento del fenómeno de flexible links., TRANS. ASME J. DYN. SYST.
deformación real no resulta indispensable para MEAS. CONTROL., vol. 110, no. 4, pp. 410-415,
resolver sus efectos dentro de los límites que exigen 1988.
las aplicaciones actuales, pero representa una pequeña
aportación al conocimiento describir el fenómeno de
deformación de un eslabonamiento que siempre se ha
despreciado sistemáticamente en múltiples
aplicaciones prácticas.También puede leer