Cerbo GX Manual - ESPAÑOL - Victron Energy
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

ESPAÑOL
Cerbo GX Manual
Rev 11 11/2021
Cerbo GX Manual
Tabla de contenidos
1. Introducción ........................................................................................................................... 1
1.1. ¿Qué es el Cerbo GX? ..................................................................................................... 1
1.2. ¿Qué hay en la caja? ....................................................................................................... 1
2. Instalación ............................................................................................................................. 2
2.1. Resumen de las conexiones ............................................................................................... 2
2.2. Alimentación ................................................................................................................. 2
2.3. Conexión de productos Victron ............................................................................................ 3
2.3.1. Multis/Quattros/Inversores (productos VE.Bus) ............................................................... 3
2.3.2. Serie de monitores de batería BMV-700 y MPPT con un puerto VE.Direct ................................ 4
2.3.3. Skylla-i, derivador Lynx VE.Can, Lynx Ion + Shunt y MPPT con un puerto VE.Can ...................... 5
2.3.4. Interfaces VE.Can y BMS-Can .................................................................................. 5
2.3.5. Serie BMV-600 .................................................................................................... 5
2.3.6. Caja de conexiones CC .......................................................................................... 5
2.3.7. Adaptador de transmisor resistivo de nivel de depósito VE.Can ............................................ 5
2.4. Conexión de un inversor FV ................................................................................................ 6
2.5. Conexión de un GPS USB ................................................................................................. 6
2.6. Conexión de un GPS NMEA 2000 ........................................................................................ 6
2.7. Conexión de un generador Fischer Panda ............................................................................... 7
2.8. Conexión de sensores de nivel de depósito .............................................................................. 7
2.9. Conexión de transmisores de nivel de depósito NMEA 2000 de terceros ............................................ 8
2.10. Conexión de sensores de temperatura .................................................................................. 9
2.11. Conexión de sensores de radiación solar, temperatura y velocidad del viento IMT .............................. 12
2.11.1. Visualización de datos - VRM ................................................................................ 16
3. Conectividad a Internet ........................................................................................................... 17
3.1. Puerto Ethernet LAN ...................................................................................................... 17
3.2. Wi-Fi ........................................................................................................................ 17
3.3. GX GSM .................................................................................................................... 18
3.4. Red móvil (celular) con router 3G o 4G ................................................................................. 18
3.5. Anclaje a red o tethering USB con un teléfono móvil ................................................................. 19
3.6. Configuración IP ........................................................................................................... 19
3.7. Conexión de Ethernet y Wi-Fi (conmutación por error) ............................................................... 19
3.8. Minimizar el tráfico de Internet ........................................................................................... 19
3.9. Más información sobre la configuración de una conexión a Internet y una RPV .................................. 20
4. Acceso al dispositivo GX ......................................................................................................... 21
4.1. Usando VictronConnect vía Bluetooth .................................................................................. 21
4.2. Acceso a través del punto de acceso a Wi-Fi integrado .............................................................. 24
4.3. Acceso a la consola remota a través de la red LAN/Wi-Fi local ..................................................... 24
4.3.1. Otros métodos para encontrar la dirección de IP para la consola remota ................................ 25
4.4. Acceso a través de VRM ................................................................................................. 27
5. Configuración ....................................................................................................................... 29
5.1. Estructura del menú y parámetros configurables ...................................................................... 29
5.2. Estado de carga (SoC) de la batería .................................................................................... 36
5.2.1. ¿Qué dispositivo debo usar para calcular el estado de carga de la batería? ............................ 36
5.2.2. Las diferentes soluciones explicadas en profundidad ...................................................... 36
5.2.3. Notas sobre el estado de carga ............................................................................... 37
5.2.4. Selección de la fuente de estado de carga (SoC) ........................................................... 38
5.2.5. Información detallada sobre el estado de carga VE.Bus ................................................... 39
5.3. Personalización del logotipo de la página de barcos y caravanas ................................................... 39
6. GX - Cómo actualizar el firmware ............................................................................................... 40
6.1. Registro de cambios ...................................................................................................... 40
6.2. A través de Internet o con una tarjeta microSD o una memoria USB ............................................... 40
6.3. Descarga directa desde Internet ......................................................................................... 40
6.4. Tarjeta microSD o memoria USB ........................................................................................ 40
7. Seguimiento del inversor/cargador VE.Bus ................................................................................... 42
7.1. Ajuste del límite de corriente de entrada ............................................................................... 42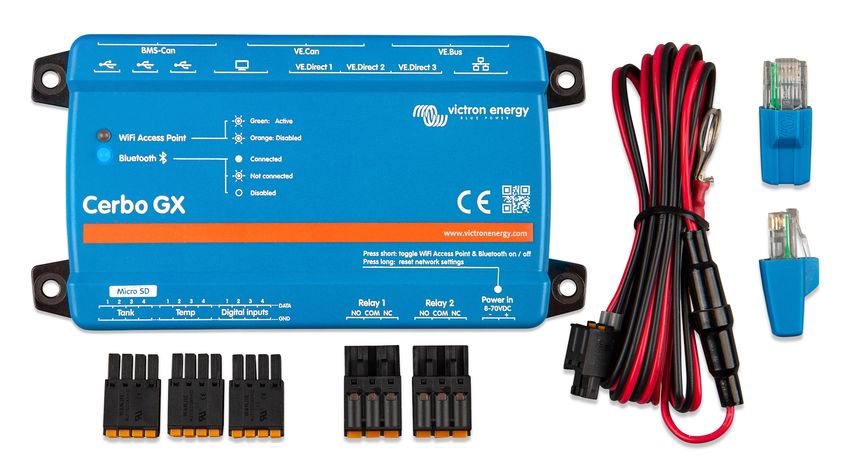
Cerbo GX Manual
7.2. Advertencia sobre la rotación de fase ................................................................................... 43
7.3. Seguimiento de fallo de la red ........................................................................................... 44
7.4. Menú avanzado ............................................................................................................ 44
8. Control de corriente y tensión distribuido (DVCC) .......................................................................... 46
8.1. Introducción y características ............................................................................................ 46
8.2. Requisitos de DVCC ...................................................................................................... 47
8.3. Efectos del DVCC en el algoritmo de carga ............................................................................ 47
8.4. Características DVCC para todos los sistemas ........................................................................ 48
8.4.1. Limitar corriente de carga ...................................................................................... 48
8.4.2. Sensor de tensión compartido (SVS) ......................................................................... 49
8.4.3. Sensor de temperatura compartido (STS) ................................................................... 49
8.4.4. Sensor de corriente compartido (SCS) ....................................................................... 49
8.5. Características DVCC cuando se usa una batería CAN-bus BMS .................................................. 49
8.6. DVCC para sistemas con Asistente ESS ............................................................................... 50
9. Portal VRM ........................................................................................................................... 51
9.1. Introducción al portal VRM ............................................................................................... 51
9.2. Registro en VRM .......................................................................................................... 51
9.3. Registro de datos en VRM ............................................................................................... 51
9.4. Resolución de problemas con el registro de datos .................................................................... 52
9.5. Análisis de datos sin Internet, sin VRM ................................................................................. 55
9.6. Consola remota de VRM - Resolución de problemas ................................................................. 56
10. Integración de pantalla multifuncional marina mediante aplicación .................................................... 57
10.1. Introducción y requisitos ................................................................................................ 57
10.2. Pantallas multifuncionales compatibles e instrucciones ............................................................. 58
11. Integración de pantalla multifuncional marina mediante NMEA 2000 .................................................. 59
11.1. Introducción a NMEA 2000 ............................................................................................. 59
11.2. Dispositivos/PGN compatibles .......................................................................................... 59
11.3. Configuración NMEA 2000 .............................................................................................. 61
11.4. NMEA 2000: Configuración de las instancias de dispositivo ........................................................ 61
11.5. Datos técnicos de la salida NMEA 2000 .............................................................................. 62
11.5.1. Glosario de NMEA 2000 ...................................................................................... 62
11.5.2. Dispositivos virtuales NMEA 2000 ........................................................................... 63
11.5.3. Clases y funciones NMEA 2000 .............................................................................. 63
11.5.4. Instancias NMEA 2000 ........................................................................................ 63
11.5.5. Cambio de Instancias NMEA 2000 .......................................................................... 64
11.5.6. Números de identidad únicos PGN 60928 NAME ......................................................... 65
12. Entradas digitales ................................................................................................................ 66
12.1. Configuración ............................................................................................................. 66
12.2. Lectura de las entradas digitales mediante Modbus-TCP ........................................................... 67
13. GX - Arranque/parada automática del generador ........................................................................... 68
13.1. GX - Arranque/parada automática del generador .................................................................... 68
13.2. Cableado .................................................................................................................. 68
13.3. Activación de la función de arranque/parada ......................................................................... 68
13.4. Arranque/parada general - Página principal .......................................................................... 69
13.5. Ajustes .................................................................................................................... 69
13.6. Condiciones: Parámetros que puede definir el usuario para que se active el arranque automático del
generador. ....................................................................................................................... 70
13.7. Resolución de problemas ............................................................................................... 74
14. Procedimiento para restablecer los valores de fábrica ................................................................... 75
15. Códigos de error .................................................................................................................. 76
16. Más información .................................................................................................................. 77
17. Preguntas Más Frecuentes ..................................................................................................... 78
Cerbo GX Manual 17.1. Cerbo GX Preguntas Más Frecuentes .............................................................................. 78 17.2. P2: ¿Necesito un BMV para ver el estado de carga correcto? ..................................................... 78 17.3. P3: No tengo Internet, ¿dónde puedo insertar una tarjeta SIM? ................................................... 78 17.4. P4: ¿Puedo conectar un dispositivo GX y un VGR2/VER a un Multi/Inversor/Quattro? ......................... 78 17.5. P5: ¿Puedo conectar varios Cerbo GX a un Multi/Inversor/Quattro? .............................................. 78 17.6. P6: Veo lecturas de potencia o de corriente (amperios) incorrectas en mi Cerbo GX ........................... 79 17.7. P7: Hay una opción del menú llamada "Multi" en vez de tener el nombre del producto VE.Bus ............... 79 17.8. P8: En el menú aparece "Multi" aunque no hay ningún inversor, Multi o Quattro conectado. .................. 80 17.9. P9: Cuando escribo la dirección de IP del Cerbo GX en el navegador aparece una página web con el nombre Hiawatha. .............................................................................................................. 80 17.10. P10: Tengo varios cargadores solares MPPT 150/70 funcionando en paralelo. ¿Desde cuál puedo ver el estado del relé en el menú del Cerbo GX? ............................................................................... 80 17.11. P11: ¿Cuánto tiempo debe tardar una actualización automática? ................................................ 80 17.12. P12: Tengo un VGR con IO Extender ¿cómo puedo sustituirlo por un Cerbo GX? ............................ 80 17.13. P13: ¿Puedo usar VEConfigure remoto, como hacía con el VGR2? ............................................. 80 17.14. P14: El panel Blue Power podía encenderse a través de la red VE.Net ¿puedo hacer lo mismo con un Cerbo GX? ...................................................................................................................... 80 17.15. P15: ¿Qué tipo de red usa el Cerbo GX (puertos TCP y UDP)? ................................................. 80 17.16. P16: ¿Cuál es la función del elemento del menú Asistencia remota (SSH), del menú Ethernet? ............ 81 17.17. P17: No veo la asistencia a productos VE.Net en la lista ¿aún está disponible? ............................... 81 17.18. P18: ¿Cuántos datos usa el Cerbo GX? ............................................................................. 81 17.19. P19: ¿Cuántos sensores de corriente CA puedo conectar en un sistema VE.Bus? ........................... 82 17.20. P20: Problemas con un Multi que no arranca cuando se conecta un Cerbo GX / Precaución al encender el Cerbo GX desde la terminal AC-out de un Multi, Quattro o inversor VE.Bus. ............................ 82 17.21. P21: Me encanta Linux, la programación, Victron y el Cerbo GX. ¿Puedo hacer más cosas? ............... 83 17.22. P22: ¿Cómo puedo cambiar el logotipo? ............................................................................ 83 17.23. P23: El Multi se reinicia todo el tiempo (cada 10 segundos) ...................................................... 83 17.24. P24: ¿Qué significa el error nº 42? ................................................................................... 83 17.25. Nota sobre Licencia Pública General ............................................................................. 83

Cerbo GX Manual 1. Introducción 1.1. ¿Qué es el Cerbo GX? El Cerbo GX está en el corazón de su instalación de energía. Los demás componentes del sistema, como inversores/cargadores, cargadores solares y baterías, están conectados a él. El Cerbo GX garantiza que todos trabajen en armonía. Hay una pantalla táctil opcional para el Cerbo GX llamada GX Touch. La monitorización del sistema puede hacerse o bien con el Cerbo GX que tiene delante de usted o desde cualquier parte del mundo utilizando una conexión a Internet y el portal VRM. El Cerbo GX también permite hacer actualizaciones de firmware y modificar la configuración a distancia. El Cerbo GX es parte de la familia de productos GX. Los productos GX son una moderna solución de seguimiento de Victron y funcionan con nuestro sistema operativo Venus OS. Toda la información de este manual hace referencia al último software. Puede comprobar si su dispositivo tiene la última versión en el menú de Firmware [29] cuando el dispositivo GX esté conectado a Internet. Para instalaciones sin Internet, puede encontrar la última versión en Victron Professional. 1.2. ¿Qué hay en la caja? • Dispositivo Cerbo GX • Cable de alimentación con portafusible y terminales redondos M8 para conexión a una batería o a una barra de conexiones CC. • Terminadores VE.Can (2 unidades). • Bloques terminales para todos los conectores de cada lado. • En este vídeo puede ver cómo desembalar el producto y un resumen de las interfaces. https://www.youtube.com/embed/3wheKaU2_qw Página 1 Introducción
Cerbo GX Manual
2. Instalación
2.1. Resumen de las conexiones
VE.Direct inverter, charger, peak power pack
814 W 230 W
Networking
RS485 Energy Modbus TCP,
meter Internet connectivity VRM &
Remote
Zigbee wireless to 67 240 W
Support
RS485 adapter
Internet router
GX Touch 50 touchscreen display
IMT solar BMV & SmartShunt Ethernet
RS inverter irradiation,
SmartSolar & BlueSolar MPPT
Skylla-i, Skylla-S charger VE.Can wind and RS485
temperature to USB
sensor
Zigbee wireless to USB Compatible Compatible
HDMI
AC PV inverter Marine MFD
USB
- Vbatt +
- Aux
Error
-
EM24
3 x VE.Direct ports Ethernet
3 x USB ports Energy
GX GSM meter
RS485 to USB interface
USB hubs
WIFI dongles
Keyboard
VE.Can RJ-45 USB GPS modules
USB memory
VE.Can RJ-45
VE.Can VE.Bus RJ-45
BMS-Can Cable Type A or B terminator
500 kbps
Managed Battery BMS
CAN
Victron Compatible Battery Management
Systems
Digital Multi Control GX
Multi
MultiPlus
MultiPlus-II
Quattro
SmartSolar MPPT VE.Can Lynx Shunt VE.Can VE.Bus Phoenix Inverter
VE.Can to MicroSD card WIFI & Bluetooth on/off
To Marine NMEA2000 Bluetooth connection firmware updates reset network
NMEA2000 Network adapter & built in WIFI to data logging button Cerbo GX power
VictronConnect app from battery
with Remote Console
814 W 230 W 2 x Potential Free Relays
Generator start/stop, alarm signaling, remote control switch
4 x Resistive 4 x Digital inputs
tank level inputs Door Alarm
67 240 W
Bilge pump
Bilge alarm
Burglar alarm
Smoke alarm
Fire alarm
CO2 alarm
4 x Temperature Generator running
5V max – not isolated
inputs
En el Cerbo GX, la toma USB más cercana al conector HDMI sólo puede usarse para alimentar un GX Touch. Ese puerto USB
no puede usarse para ninguna función relacionada con datos, como pueden ser cables VE.Direct a USB, memorias USB, USB-
GPS, u otros usos comunes de los puertos USB. Es un puerto de alimentación, no de datos.
2.2. Alimentación
El dispositivo se alimenta con el conector Power in V+. Acepta de 8 a 70 V CC. El dispositivo no se alimentará por sí mismo
desde ninguna de las otras conexiones (por ejemplo, de la red). El cable de alimentación CC suministrado incluye un fusible de
fusión lenta de 3,15 A.
Si la tensión CC excede los 60 V, el Cerbo GX se clasifica como un “producto integrado”. La instalación debe hacerse de tal
manera que el usuario no pueda tocar los terminales.
Cuando el Cerbo GX se use en una instalación con un VE.Bus BMS, conecte el Power in V+ del Cerbo GX al terminal marcado
como “Load disconnect” (desconexión de la carga) del VE.Bus BMS. Conecte los dos cables negativos al polo negativo de una
batería normal.
Precaución sobre alimentación desde el terminal AC-out de un inversor VE.Bus, Multi o Quattro:
Si alimenta el Cerbo GX desde un adaptador de CA conectado al puerto AC-out de cualquier producto VE.Bus (inversor, Multi o
Quattro), se producirá un bloqueo después de que los productos VE.Bus se apaguen por cualquier razón (algún fallo operativo o
un arranque autógeno). Los dispositivos VE.Bus no se encenderán hasta que el Cerbo GX tenga alimentación, pero el Cerbo GX
no se encenderá hasta que tenga alimentación. Este bloqueo puede solucionarse desenchufando brevemente el cable VE.Bus
del Cerbo GX y en ese momento los productos VE.Bus empezarán a encenderse inmediatamente.
Página 2 InstalaciónCerbo GX Manual O puede hacerse una modificación en los cables RJ45. Consulte la pregunta frecuente nº 20 [82] para más información sobre esto. Tenga en cuenta que tanto con la modificación arriba indicada como sin ella, arrancar el equipo de seguimiento con el AC-out de un inversor/cargador (por supuesto) tiene la desventaja de que el seguimiento se detendrá cuando se produzca un problema que apague el inversor/cargador, como por ejemplo una sobrecarga del inversor, alta temperatura o tensión baja de la batería. Por lo tanto, se recomienda alimentar el dispositivo GX desde la batería. Aislamiento Puesto que el Cerbo GX está conectado a muchos productos diferentes, es importante que preste la atención necesaria al aislamiento para evitar que se formen bucles de tierra. Esto no será un problema en el 99 % de las instalaciones. • Los puertos VE.Bus están aislados • Los puertos VE.Direct están aislados • Los puertos VE.Can no están aislados. • Los puertos USB no están aislados. La conexión de una mochila Wi-Fi o GPS no ocasionará problemas ya que no está conectada a otra fuente de alimentación. Aunque habrá un bucle de tierra cuando monte un concentrador USB alimentado por separado, hemos hecho muchas pruebas en las que no se ha detectado que esto causara ningún problema. • El puerto Ethernet está aislado, excepto por el apantallamiento: use cables UTP sin apantallamiento para la red Ethernet. Ampliación de los puertos USB con un concentrador USB autoalimentado Aunque se puede ampliar el número de puertos USB con un concentrador, la cantidad de alimentación que el puerto USB de a bordo puede proporcionar es limitada. Cuando amplíe el número de puertos USB, le recomendamos que use siempre concentradores USB alimentados. Y para minimizar las probabilidades de que surjan problemas, use concentradores USB de buena calidad. Puesto que Victron también ofrece un adaptador VE.Direct a USB, puede utilizar está opción para aumentar el número de dispositivos VE.Direct que puede conectar a su sistema, consulte en este documento el número máximo de dispositivos que se pueden conectar a diferentes dispositivos GX. 2.3. Conexión de productos Victron 2.3.1. Multis/Quattros/Inversores (productos VE.Bus) Para simplificar, nos referiremos a todos los Multis, Quattros e inversores como productos VE.Bus. La versión más antigua de los dispositivos VE.Bus que puede conectarse al Cerbo GX es 19xx111 o 20xx111, lanzadas en 2007. También se admite el firmware VE.Bus 26xxxxx y 27xxxxx, pero no el 18xxxxx. Tenga en cuenta que no se puede usar el On/Off remoto (cabecera de la PCB de control del VE.Bus) junto con un Cerbo GX. Debería haber un cable entre los terminales de la izquierda y del centro, como cuando se envía desde la fábrica. En caso de que se necesite un interruptor alámbrico que desactive el sistema, utilice el Safety Switch Assistant (asistente de interruptor de seguridad). Productos VE.Bus únicos Para conectar un solo producto VE.Bus, utilice una de las tomas VE.Bus de la parte posterior del Cerbo GX. Ambas tomas son idénticas, puede usar cualquiera de las dos. Use un cable RJ45 UTP estándar. Puede consultar nuestra lista de precios. Sistemas VE.Bus paralelos, divididos y trifásicos Para conectar varios productos VE.Bus configurados como un sistema VE.Bus paralelo, dividido o trifásico, conecte el primer o el último producto VE.Bus de la cadena a cualquier de las tomas VE.Bus de la parte posterior del Cerbo GX. Use un cable RJ45 UTP estándar. Puede consultar nuestra lista de precios. Sistemas VE.Bus con baterías de litio y un VE.Bus BMS • Conecte el Cerbo GX a la toma llamada “MultiPlus/Quattro” o a uno de los Multi o Quattro del sistema. No lo conecte a la toma del panel remoto del VE.Bus BMS. • Tenga en cuenta que no se podrá controlar el conmutador On/Off/Charger Only (encendido/apagado/solo cargador). Esta opción se desactiva automáticamente en el menú del Cerbo GX cuando se usa un VE.Bus BMS. La única forma de controlar un Multi o un Quattro cuando se usa con un VE.Bus BMS es añadir un Digital Multi Control al sistema. En sistemas con un VE.Bus BMS se puede configurar el límite de corriente de entrada. • Se puede combinar un MultiPlus/Quattro con un VE.Bus BMS y un Digital Multi Control. Solo hay que conectar el Digital Multi Control a la toma RJ-45 del VE.Bus BMS marcada como Remote panel (panel remoto). • Para permitir que el Cerbo GX se apague solo en caso de batería baja, asegúrese de que el Cerbo GX se alimenta a través del VE.Bus BMS: conecte Power in V+ del Cerbo GX a Load disconnect (desconexión de carga) del VE.Bus BMS. Y conecte los dos cables negativos al polo negativo de una batería normal. Página 3 Instalación
Cerbo GX Manual Combinación del Cerbo GX con un Digital Multi Control Es posible conectar un Cerbo GX y un Digital Multi Control a un sistema VE.Bus. La opción de encender y apagar el producto o ponerlo en modo Charger Only (Solo cargador) mediante el Cerbo GX quedará desactivada. Lo mismo ocurre con el límite de corriente de entrada: cuando hay un Digital Multi Control en el sistema, el límite de corriente de entrada establecido en el panel de control será el parámetro maestro, y no será posible cambiarlo en el Cerbo GX. Conexión de varios sistemas VE.Bus a uno solo Cerbo GX Solo se puede conectar un sistema VE.Bus a los puertos VE.Bus de la parte posterior del Cerbo GX. La forma profesional de controlar más sistemas es añadir uno más Cerbo GX Si necesita conectar más de un sistema al mismo Cerbo GX, use un MK3-USB. La funcionalidad quedará limitada: • Para generar los datos de las páginas de Resumen, solo se usa el sistema conectado a los puertos VE.Bus integrados. • Todos los sistemas conectados aparecerán en la lista de dispositivos • Todos los sistemas conectados se considerarán para los cálculos de consumo de energía y distribución (gráficos kWh de VRM) • Para la lógica de arranque/parada del generador, solo se usa el sistema conectado a los puertos VE.Bus integrados. • En el caso de un sistema ESS, solo se usa el sistema conectado a los puertos VE.Bus integrados en los mecanismos ESS. El otro solo aparece en la lista de dispositivos. Otra opción es usar la interfaz VE.Bus a VE.Can (ASS030520105). Añada una por cada sistema adicional. Tenga en cuenta que no lo recomendamos, esta interfaz está descatalogada. Compruebe que la red VE.Can está rematada y tiene alimentación. Para alimentar la red VE.Can, consulte la pregunta nº 17 de nuestro libro blanco sobre comunicación de datos. 2.3.2. Serie de monitores de batería BMV-700 y MPPT con un puerto VE.Direct Las conexiones directas con un cable VE.Direct están limitadas por el número de puertos VE.Direct del dispositivo (véase Resumen de conexiones [2]). Hay dos tipos de cables VE.Direct: 1. Cables VE.Direct directos, ASS030530xxx 2. Cables VE.Direct con un conector acodado en un extremo. Están diseñados para minimizar la profundidad necesaria detrás de un panel, ASS030531xxx Los cables VE.Direct tienen una longitud máxima de 10 metros. No es posible alargarlos. Si necesita más longitud, use un adaptador VE.Direct a USB con un cable alargador USB activo. También es posible usar la interfaz VE.Direct a VE.Can, pero tenga en cuenta que esto solo funciona para BMV-700 y BMV-702. No funciona con BMV-712, ni con cargadores solares e inversores MPPT con un puerto VE.Direct. En el siguiente apartado puede consultar más información sobre esta interfaz VE.Can. Conexión a su Cerbo GX de un número de dispositivos VE.Direct superior al número de puertos VE.Direct. En primer lugar, tenga en cuenta que la cantidad máxima de dispositivos VE.Direct que se pueden conectar viene determinada por cada dispositivo GX y limitada por la potencia de la CPU. También puede verse reducida en el caso de sistemas muy complejos, como por ejemplo cuándo hay muchos inversores FV CA o inversores cargadores sincronizados, etc.La forma en que se conecten, ya sea directamente o mediante USB o hub, no cambia esa cantidad máxima. Consulte aquí el límite máximo para todos los dispositivos GX. Para el Cerbo GX, el límite es 15. Además, existen opciones para conectar más productos VE.Direct que puertos VE.Direct disponibles: • Opción 1: Use la interfaz VE.Direct a USB. El Cerbo GX tiene puertos USB integrados (véase el Resumen de conexiones [2]). Use un concentrador USB cuando necesite más puertos USB. • Opción 2: (¡Sólo!) los BMV-700 y BMV-702 pueden también conectarse con la interfaz VE.Direct a VE.Can. Tenga en cuenta que los BMV-712, los MPPT y los inversores VE.Direct no pueden conectarse con esta interfaz CAN-bus, ya que esta no traduce los datos de dichos dispositivos en mensajes CAN-bus. Cuando use la interfaz VE.Direct a VE.Can, asegúrese de que la red VE.Can está rematada y tiene alimentación. Para alimentar la red VE.Can, consulte la pregunta nº 17 de nuestro libro blanco sobre comunicación de datos. Por último, tenga en cuenta que esta interfaz CAN-bus está descatalogada. Observaciones sobre los MPPT VE.Direct más antiguos • Los MPPT 70/15 tienen que ser del año/semana 1308 o posterior. Los 70/15 anteriores no son compatibles con el Cerbo GX y lamentablemente actualizar el firmware del MPPT no será de ninguna ayuda. Para encontrar el número año/semana de su modelo, busque el número de serie impreso en la etiqueta que está en la parte posterior. Por ejemplo, el número HQ1309DER4F significa 2013, semana 9. Página 4 Instalación
Cerbo GX Manual 2.3.3. Skylla-i, derivador Lynx VE.Can, Lynx Ion + Shunt y MPPT con un puerto VE.Can Para conectar un producto con un puerto VE.Can, use un cable RJ45 UTP estándar. (Disponible con conectores rectos y acodados) No olvide poner terminadores VE.Can en los dos extremos de la red VE.Can. Se suministra una bolsa con dos terminadores con cada producto VE.Can. También están disponibles por separado. Otras observaciones: 1. Para funcionar con el Cerbo GX un MPPT 150/70 necesita un firmware v2.00 o posterior. 2. Puede combinar un panel de control Skylla-i con un Cerbo GX. 3. Puede combinar un panel de control Ion con un Cerbo GX. 4. Skylla-i, el derivador Lynx VE.Can y Lynx Ion + Shunt y los MPPT con un puerto VE.Can alimentan la red VE.Can, de modo que en estas condiciones no será necesario proporcionar alimentación por separado. Los convertidores de protocolo, por ejemplo la interfaz VE.Bus a VE.Can y la interfaz BMV a VE.Can, no alimentan la red VE.Can. 2.3.4. Interfaces VE.Can y BMS-Can El Cerbo GX tiene dos interfaces CAN-bus. Son independientes en lo que respecta a los datos y a los dispositivos conectados. No están aisladas eléctricamente. Una está etiquetada como VE.Can y la otra como BMS-Can, con una imagen de pantalla en la parte superior de la cara frontal de la unidad. Cada una de estas se corresponde con el "puerto VE.Can" y el "puerto BMS-Can" indicados en el menú de servicios del software GX. Por defecto, VE.Can está ajustado a 250 kbit/s y BMS-Can a 500 kbit/s. VE.Can está pensado para su uso con los productos VE.Can de Victron (y los compatibles con Victron) como el MPPT VE.Can y el derivador Lynx VE.Can. Estos dispositivos VE.Can 250 kbit/s se pueden encadenar juntos a lo largo de este bus. Deben colocarse en ambos extremos los terminadores VE.Can incluidos. BMS-Can está pensado para su uso con sistemas de baterías gestionadas compatibles, como Pylontech, BYD y Freedomwon, entre muchas otras. Debe colocarse el terminador incluido (igual que el usado con VE.Can) en el extremo de Victron (en el Cerbo GX). Puede que sea necesario colocar terminadores en la batería gestionada, BMS o BMU - esto se explicará en las instrucciones de la batería gestionada compatible con Victron específicas de esa batería. Algunas baterías se terminan automáticamente. No se pueden mezclar VE.Can y BMS-Can en el mismo bus. Si quiere usar los dos, necesitará un dispositivo GX con dos buses separados, cada uno con dos puertos RJ45; 4 puertos CAN-bus en total. Los puertos BMS-Can solo se pueden ajustar en 500 kbit/s y deshabilitado. PUEDE ajustar el puerto VE.Can de 250 kbit/s a 500 kbit/s (o una de las otras velocidades CAN-bus para otras aplicaciones CAN-bus). Es posible que se afirme que otros tipos de baterías y BMS son compatibles con BMS-Can o VE.Can, pero si no están en la lista de baterías compatibles, quiere decir que Victron no las ha probado y no ha confirmado que funcionan. Otro posible factor de confusión es que HAY algunos productos BMS en el mercado que usan un perfil BMS CAN-bus a 250 kbit/s. Estos solo pueden conectarse al puerto VE.Can y también tiene que configurarse para ajustarse (VE.Can y CAN-bus BMS (250 kbit/s)) en el menú de servicios del puerto VE.Can. Estos BMS pueden usarse en la misma cadena de cable como otros dispositivos VE.Can Victron. 2.3.5. Serie BMV-600 Conecte el BMV-600 con el cable VE.Direct a BMV-60xS. (ASS0305322xx) 2.3.6. Caja de conexiones CC Conecte la caja de conexiones CC con el cable RJ-12 suministrado. A continuación conecte el BMV-700 al Cerbo GX, consulte las instrucciones de conexión del BMV-700. 2.3.7. Adaptador de transmisor resistivo de nivel de depósito VE.Can Consulte la página y el manual en nuestro sitio web para obtener más información sobre el adaptador. Para conectar un producto con un puerto VE.Can, use un cable UTP RJ45 estándar . No olvide poner terminadores VE.Can en los dos extremos de la red VE.Can. Se suministra una bolsa con dos terminadores con cada producto VE.Can. También están disponibles por separado (ASS030700000).. (Disponible con conectores rectos y acodados) Página 5 Instalación
Cerbo GX Manual
Asegúrese de que el CAN-bus tiene alimentación. Puede consultar más información en el capítulo de Alimentación del manual
del Adaptador de transmisor de nivel de depósito.
2.4. Conexión de un inversor FV
La medición de la salida de un inversor FV le proporcionará al usuario una visión general del equilibrio energético y de la
distribución de energía en cada momento. Tenga en cuenta que estas mediciones solo se usan para mostrar información. La
instalación no las necesita ni las usa para su funcionamiento. Además de controlar, el dispositivo GX también puede limitar
algunos tipos y marcas de inversores FV, es decir, reducir la potencia de salida. Esto se usa, y es imprescindible, para la opción
Zero feed-in (sin devolución a la red) de los ESS.
Conexiones directas
Tipo Zero feed-in (sin devolución a la red) Detalles
Fronius Sí Conexión LAN, véase GX - GX - manual Fronius
SMA No Conexión LAN, véase GX - GX - manual SMA
SolarEdge No Conexión LAN, véase GX - manual SolarEdge
ABB Sí Conexión LAN, véase GX - manual ABB
Uso de un contador En el caso de inversores FV que no se puedan conectar digitalmente, se puede usar un contador:
Tipo Zero Detalles
feed-in
(sin
devolu
ción a
la red)
Sensor de corriente No Conectado a la entrada analógica del inversor/cargador. Menor coste - menor
CA precisión. Contador de energía
Contador de energía No Conectado mediante un cable al Cerbo GX o de modo inalámbrico con nuestras
interfaces Zigbee a USB/RS485. Véase la página de inicio de Contadores de energía
Sensores No Véase el manual del sensor inalámbrico de CA - Descatalogado
inalámbricos de CA
2.5. Conexión de un GPS USB
Un GPS permite hacer un seguimiento a distancia de vehículos o barcos desde el portal VRM. También es posible configurar una
geocerca (geofence) que enviará una alarma automáticamente cuando el sistema salga de una zona determinada. Se pueden
descargar archivos gps-tracks.kml para abrirlos en Navlink y Google Earth, por ejemplo.
Victron no vende GPS-USB pero el Cerbo GX acepta módulos GPS de otros fabricantes que utilicen el juego de comandos
NMEA 0183; casi todos los usan. Puede comunicarse a tasas de baudios de 4800 y 38400. Enchufe la unidad en cualquiera de
las tomas USB. La conexión puede tardar unos minutos, pero el Cerbo GX reconocerá automáticamente el GPS. La ubicación de
la unidad se enviará automáticamente al portal VRM y se mostrará su posición en el mapa.
Se ha probado la compatibilidad de Cerbo GX con:
• Globalsat BU353-W SiRF STAR III 4800 baudios
• Globalsat ND100 SiRF STAR III 38400 baudios
• Globalsat BU353S4 SiRF STAR IV 4800 baudios
• Globalsat MR350 + BR305US SiRF STAR III 4800 baudios
2.6. Conexión de un GPS NMEA 2000
Un GPS permite hacer un seguimiento a distancia de vehículos o barcos desde el portal VRM. También es posible configurar una
geocerca (geofence) que enviará una alarma automáticamente cuando el sistema salga de una zona determinada. Se pueden
descargar archivos gps-tracks.kml para abrirlos en Navlink y Google Earth, por ejemplo.
Los transmisores GPS NMEA 2000 de otros fabricantes deben cumplir los siguientes requisitos:
• La clase de dispositivo NMEA 2000 ha de ser 60, Navegación.
• La función del dispositivo NMEA 2000 ha de ser 145, Posición de la propia nave (GNSS).
Página 6 InstalaciónCerbo GX Manual • La posición (latitud, longitud) debe transmitirse en cualquier PGN 129.025. • La altura, que es opcional, debe transmitirse en PGN 129.029. • El rumbo y la velocidad (opcionales) deben transmitirse en PGN 129.026. En principio, la mayoría de los GPS NMEA 2000 deben funcionar. Se ha probado la compatibilidad con: • Garmin GPS 19X NMEA 2000 Para conectar una red NMEA 2000 al puerto VE.Can del dispositivo GX, cada uno con un conector de distinto estilo, hay dos soluciones: 1. El cable VE.Can a NMEA2000. Este cable permite activar o desactivar la red NMEA 2000 a través del equipo de Victron simplemente insertando o quitando su fusible. Tenga en cuenta la advertencia que se indica más adelante. 2. El adaptador VE.Can 3802 de OSUKL. La ventaja es que sirve para conectar un único dispositivo NMEA 2000, como un transmisor de nivel de depósito, a una red VE.Can. También puede alimentar una red NMEA 2000 de menor tensión directamente a partir de un sistema Victron de 48 V. Advertencia y solución para sistemas de 24 V y 48 V Aunque todos los componentes Victron aceptan hasta 70 V de entrada en sus conexiones CAN-bus, algunos equipos NMEA 2000 no. Necesitan una conexión NMEA 2000 alimentada con 12 V, y a veces funcionan hasta 30 o 36 V. Asegúrese de revisar la ficha técnica de todos los equipos NMEA 2000 usados. Si un sistema contiene elementos NMEA 2000 que necesiten una tensión de red inferior a la tensión de la batería, puede considerar el adaptador VE.Can 3802 de OSUKL mencionado. O también puede instalar el cable VE.Can a NMEA 2000 sin su fusible y aportar la alimentación correspondiente a la red NMEA 2000 con un cable adaptador de alimentación de NMEA 2000 (que no proporciona Victron). El puerto VE.Can del dispositivo GX no necesita alimentación externa para funcionar. 2.7. Conexión de un generador Fischer Panda Véase GX- generadores Fischer Panda. 2.8. Conexión de sensores de nivel de depósito Consulte en el Resumen de conexiones [2] la ubicación y el número de entradas de sensores de nivel de depósito. Las entradas del nivel del depósito son resistivas y deben conectarse a un transmisor de nivel de depósito que sea resistivo. Victron no suministra transmisores del nivel del depósito. Las conexiones integradas del sensor del depósito no son compatibles con sensores tipo mA ó 0-5 V. Este tipo necesitará accesorios adicionales o habrá que sustituirlo por un sensor de tipo resistivo. Los sensores se habilitan (y deshabilitan) en el menú I/O de los ajustes del dispositivo GX. Una vez habilitado, el depósito aparecerá en el menú GX con opciones para personalizar la configuración y adaptarla a su instalación en particular. Fije las unidades de volumen (metros cúbicos, litros o galones imperiales o estadounidenses) y capacidad del depósito. También es posible establecer formas personalizadas para depósitos que no sean lineales, con hasta 10 variaciones, p. ej.: 50 % del sensor equivale al 25 % del volumen y 75 % del sensor equivale al 90 % del volumen. Los puertos del nivel del depósito pueden configurarse individualmente para ser compatibles con las normas de los transmisores de nivel de depósito europeos (0 - 180 ohmios) o estadounidenses (240 - 30 ohmios) o también se puede configurar un rango personalizado de resistencia en ohmios entre 0 y 264 ohmios. Se puede configurar el tipo de fluido del depósito como combustible, agua dulce, agua residual, vivero, aceite y aguas negras (residuales) y crear un nombre personalizado. Los datos del nivel del depósito se envían a VRM, aparecen en las pantallas de resumen de la embarcación o de la caravana (si están conectadas y activadas) y pueden usarse para activar el relé, siempre que esté configurado en "bomba del depósito". Página 7 Instalación
Cerbo GX Manual Para fijar físicamente las sondas del tanque se necesita introducir una puntera o al menos 10 mm de hilos de cobre desnudos en el conector del bloque de terminales extraíble. Una vez que esté correctamente fijado, será necesario utilizar la pestaña naranja para sacar el cable introducido. 2.9. Conexión de transmisores de nivel de depósito NMEA 2000 de terceros Para que un transmisor de nivel de depósito NMEA 2000 de otro fabricante pueda verse en el dispositivo GX debe cumplir los siguientes requisitos: • Transmitir el PGN de NMEA 2000 para el nivel de líquido: 127505 • La clase de dispositivo NMEA 2000 debe ser o bien General (80) junto con el código de función Transductor (190), o bien Sensor (170). Otra opción es que la clase de dispositivo NMEA 2000 sea Sensores (75) junto con la función Nivel de líquido (150). Por el momento no se admite una única función que proporcione varios niveles de líquido. En algunos transmisores de nivel de depósito también se puede configurar la capacidad y el tipo de fluido con los menús del dispositivo GX, por ejemplo el Maretron TLA100. Es posible que los transmisores de otros fabricantes también cuenten con esta opción, merece la pena intentarlo. Transmisores de nivel de depósito NMEA 2000 de compatibilidad comprobada: • Maretron TLA100 • Maretron TLM100 • Transmisor de nivel de líquido Navico Fuel-0 PK, código de referencia 000-11518-001. Tenga en cuenta que necesita una pantalla Navico para configurar la capacidad, el tipo de fluido y otros parámetros del transmisor. Véase el aviso sobre la tensión más abajo. • Oceanic Systems (UK) Ltd (OSUKL) - Transmisor de nivel volumétrico 3271. En caso de que no funcione, se deberá actualizar el firmware. Póngase en contacto con OSUKL para ello. Véase el aviso sobre la tensión más abajo. • Oceanic Systems (UK) Ltd (OSUKL) - Transmisor de nivel de agua 3281. Véase el aviso sobre la tensión más abajo. Es probable que otros también funcionen. Si conoce alguno que funcione bien, por favor edite esta página o póngase en contacto con nosotros a través de Community -> Modifications (Comunidad -> Modificaciones). Para conectar una red NMEA 2000 al puerto VE.Can del dispositivo GX, cuyos conectores son de tipos distintos, hay dos soluciones: 1. El cable VE.Can a NMEA 2000. Este cable permite activar o desactivar la red NMEA 2000 a través del equipo de Victron simplemente insertando o quitando su fusible. Tenga en cuenta el aviso más abajo. Página 8 Instalación
Cerbo GX Manual 2. El Adaptador 3802 VE.Can Adapter de OSUKL. Su ventaja es que sirve muy bien para conectar un único dispositivo NMEA 2000, como un transmisor de nivel de depósito, a una red VE.Can. También puede alimentar una red NMEA 2000 de menor tensión directamente a partir de un sistema Victron de 48 V. Aviso y solución para sistemas de 24 y 48 V Aunque todos los componentes Victron aceptan hasta 70 V de entrada en sus conexiones CAN-bus, algunos equipos NMEA 2000 no. Necesitan una conexión NMEA 2000 alimentada con 12 V, y a veces hasta 30 o 36 V. Asegúrese de revisar la ficha técnica de todos los equipos NMEA 2000 usados. Si un sistema contiene elementos NMEA 2000 que necesiten una tensión de red inferior a la tensión de la batería, puede considerar el adaptador VE.Can 3802 de OSUKL mencionado. O también puede instalar el cable VE.Can a NMEA 2000 sin su fusible y aportar la alimentación correspondiente a la red NMEA 2000 con un cable adaptador de alimentación de NMEA 2000 (que no proporciona Victron). El puerto VE.Can del dispositivo GX no necesita alimentación externa para funcionar. 2.10. Conexión de sensores de temperatura Consulte en el Resumen de conexiones [2] la ubicación y el número de sensores de temperatura. Pueden usarse para medir y controlar todo tipo de entradas de temperatura. Los transmisores de temperatura no están incluidos. El sensor necesario es ASS000001000 - Sensor de temperatura QUA/PMP/ Venus GX. (Tenga que en cuenta que es distinto del accesorio de temperatura BMV). No es necesario que se conecten a la batería (aunque parecen una arandela de batería). Para fijar físicamente las sondas de temperatura se necesita introducir una puntera o al menos 10 mm de hilos de cobre desnudos en el conector del bloque de terminales extraíble. Una vez que esté correctamente fijado, será necesario presionar la pestaña naranja para sacar el cable introducido. Los sensores se conectan con el cable rojo en la parte superior del conector y el cable negro en la parte inferior. Página 9 Instalación
Cerbo GX Manual Los sensores se habilitan (y deshabilitan) en el menú Ajustes -> I/O -> Entradas analógicas de los ajustes del dispositivo GX. Página 10 Instalación
Cerbo GX Manual Una vez habilitado, los datos del sensor de temperatura se pueden ver en la lista de dispositivos, y también conectado a VRM. Seleccionar el sensor de temperatura en el menú de la lista de dispositivos le permite configurar el ajuste del Tipo de temperatura como Batería, Refrigerador o Genérico. También es posible crear un nombre personalizado en el menú del dispositivo. Se puede ajustar la compensación de temperatura y la escala, sin embargo, por ahora está opción está restringida a los usuarios con nivel de permiso de “superusuario”. Página 11 Instalación
Cerbo GX Manual 2.11. Conexión de sensores de radiación solar, temperatura y velocidad del viento IMT Compatibilidad Ingenieurbüro Mencke & Tegtmeyer GmbH (IMT) ofrece una gama de sensores de radiación solar digitales y de silicona pertenecientes a la serie Si-RS485 que son compatibles con los dispositivos Victron GX. Los sensores opcionales/adicionales de temperatura del módulo externo, temperatura ambiente y velocidad del viento también son compatibles. Los sensores externos opcionales/adicionales se conectan al sensor de radiación solar con los enchufes preinstalados o están previamente conectados al sensor de radiación solar (módulo externo y temperatura ambiente solamente). Cuando los sensores externos se conectan mediante un sensor de radiación solar adecuado, todos los datos relativos a las mediciones se transmiten al dispositivo GX de Victron con el cable de interfaz único. Cada modelo de sensor de radiación solar de la serie Si-RS485 tiene una capacidad diferente en lo que respecta a sensores externos (o viene con un sensor externo previamente conectado), por lo que es importante que considere sus necesidades futuras antes de comprar. Se puede conectar un sensor de temperatura del módulo IMT Tm-RS485-MB independiente (visible como “temperatura de la celda”) o un sensor de temperatura ambiente IMT Ta-ext-RS485-MB (visible como “temperatura externa”) directamente al dispositivo Victron GX, con un sensor de radiación solar o o sin un sensor de radiación solar. Funcionamiento Los sensores de radiación solar de IMT de la serie Si-RS485 funcionan con una interfaz eléctrica RS485 y un protocolo de comunicación Modbus RTU. El software de interfaz necesario está preinstalado en el Venus OS, pero el dispositivo GX de Victron debe contar con firmware reciente, FW v2.40 como mínimo. La conexión física al dispositivo GX de Victron se hace a través del puerto USB y necesita un cable de interfaz RS485 a USB de Victron. También se necesita una fuente de alimentación externa CC adecuada (de 12 a 28 V CC), ya que el sensor NO recibe alimentación a través del USB. Conexiones con cables El esquema de la siguiente guía de instalación representa la configuración del cableado en una instalación normal. Página 12 Instalación
Cerbo GX Manual
Conexiones con cables
Si-Sensor Interfaz RS485 a USB de Victron Señal
Marrón Naranja RS485 Data A +
Naranja Amarillo RS485 Data B -
Rojo - Pos alimentación - de 12 a 28 V CC
Negro Neg/Gnd alimentación - 0 V CC
Negro (grueso) - Tierra / Apantallamiento del cable / PE
- Rojo Pos alimentación - 5 V CC (no se usa)
- Negro Neg/Gnd alimentación - 0 V CC (no se usa)
Marrón Terminador 1 - 120R (no se usa)
Verde Terminador 2 - 120R (no se usa)
Notas sobre la instalación
La máxima tensión de la alimentación CC permitida para la gama de sensores de radiación solar de IMT de la serie Si-RS485 es
de 28,0 V CC. Según esto, para bancadas o sistemas de baterías de 24 V y 48 V debe usarse en la instalación un convertidor
CC-CC (24/12, 24/24, 48/12 o 48/24) o un adaptador CA-CC de Victron adecuados.
En bancadas o sistemas de baterías de 12 V, el sensor de radiación solar de IMT de la serie Si-RS485 puede alimentarse
directamente desde la bancada de baterías y seguirá funcionando hasta la tensión mínima de 10,5 V (según la medición del
sensor, teniendo en cuenta la caída de tensión en el cable).
Puede consultar notas y especificaciones detalladas sobre cableado/instalación en la “Guía de referencia rápida” del sensor de
radiación solar de IMT de la serie Si-RS485 y en la “Ficha técnica” del cable de interfaz RS485 a USB de Victron.
Para garantizar la integridad de la señal y el buen funcionamiento, compruebe lo siguiente:
• Los cables alargadores usados cumplen las especificaciones relativas a la superficie mínima de la sección recogidas en la
tabla correspondiente (depende de la tensión de alimentación CC y de la longitud del cable).
• Los cables alargadores tienen un apantallamiento y un núcleo de par trenzado adecuados.
Página 13 InstalaciónTambién puede leer

















































