PLATAFORMAS TELEMÁTICAS PARA - Trabajo Fin de Máster - Universidad de Jaén
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

Centro de Estudios de Postgrado
UNIVERSIDAD DE JAÉN
Centro de Estudios de Postgrado
Trabajo Fin de Máster
PLATAFORMAS
TELEMÁTICAS PARA
SERVICIOS DEL TRANSPORTE
Alumno: Bermejo Torrent, Miguel
Tutor/a: Prof. D. Antonio Jesús Yuste Delgado
Dpto: Ingeniería Telecomunicación
Junio, 2016
Agradecimientos
A la finalización de este trabajo quisiera expresar mi agradecimiento a todas
las personas que me han ayudado a llegar a este punto. A mis compañeros, a
todos los profesores del máster, al coordinador del mismo D. Francisco Javier
Rey Arranz y en particular al profesor D. Antonio Jesús Yuste Delgado, tutor del
trabajo, que desde el primer momento ha facilitado y estimulado su desarrollo.
A mi familia, que me ha apoyado en todo momento y animado para llevarlo a
cabo.
Muchas gracias a todos,
Miguel Bermejo Torrent
Linares 2016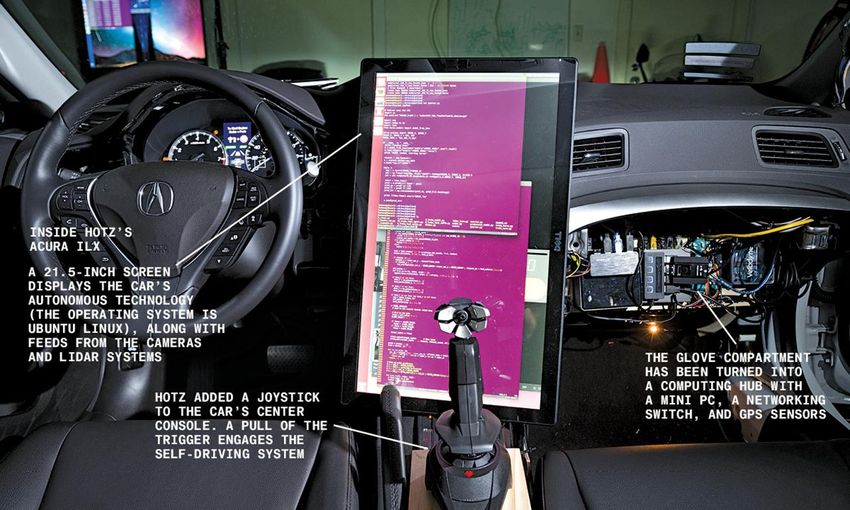
TABLA DE CONTENIDO
1 Resumen...................................................................................................................... 3
2 Introducción.................................................................................................................. 4
3 Objetivos ...................................................................................................................... 5
3.1 Objetivo del Trabajo Fin de Máster ..................................................................... 5
3.2 Organización del Documento .............................................................................. 5
4 Integración Vehículo-Infraestructura............................................................................. 7
4.1 Antecedentes Relevantes. Proyecto VII e IntelliDrive ......................................... 7
4.2 Vehículo-Infraestructura Logística. Daimler. ......................................................10
4.3 Vehículo-Infraestructura Energética. Scania ......................................................12
4.4 Autonomía en el Transporte por Carretera. Daimler y Volvo. .............................14
5 Plataformas Telemáticas .............................................................................................17
5.1 Visión del Futuro del Transporte ........................................................................17
5.2 Plataformas Telemáticas en Vehículos Automóviles ..........................................20
5.2.1 Iniciativas desde la Industria de Automoción ..............................................21
5.2.2 Iniciativas desde las Tecnologías de la Información ...................................24
5.2.3 Competencia Actual entre dos Dominios ....................................................26
5.3 Retos en la Transformación del Sector ..............................................................27
5.4 Categorías de Servicios .....................................................................................32
5.4.1 Conducción Autónoma ...............................................................................33
5.4.2 Seguridad ...................................................................................................34
5.4.3 Entretenimiento y Noticias ..........................................................................34
5.4.4 Productividad ..............................................................................................35
5.4.5 Salud y Bienestar .......................................................................................35
5.4.6 Gestión del Vehículo...................................................................................35
5.4.7 Gestión de la Movilidad ..............................................................................35
5.4.8 Integración con Hogar, Oficinas y Edificiosl ................................................36
5.4.9 Pagos en Movilidad ....................................................................................36
5.5 Pasarelas e Infraestructuras de Computación ...................................................37
5.5.1 Pasarelas o Gateways ................................................................................37
5.5.2 Infraestructuras de Computación ................................................................40
5.6 Los Sistemas de Inteligencia Artificial ................................................................42
6 Demostrador ...............................................................................................................44
1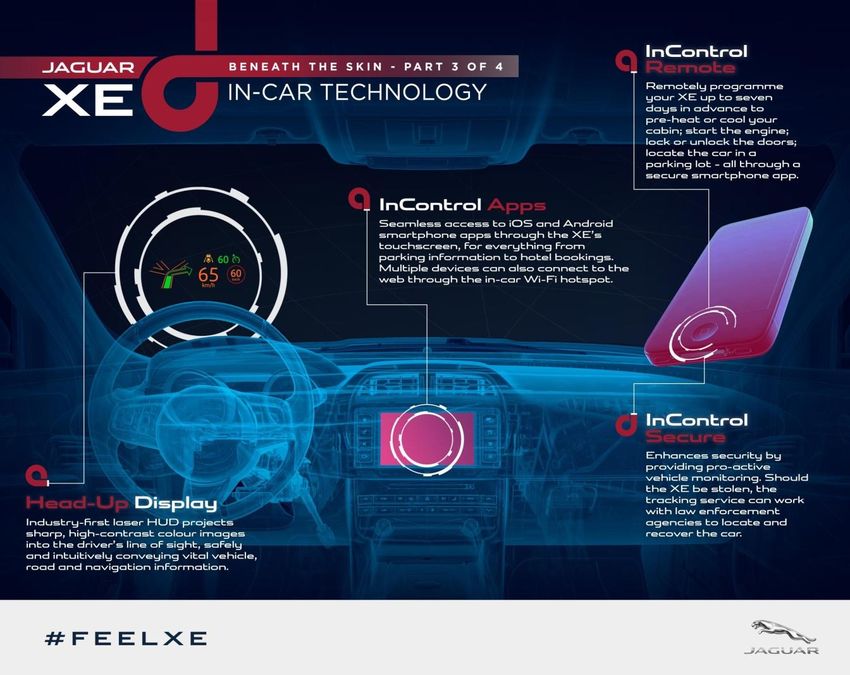
6.1 Antecedentes.....................................................................................................44
6.2 Introducción al Demostrador ..............................................................................45
6.3 Análisis ..............................................................................................................46
6.3.1 Actores .......................................................................................................46
6.3.2 Casos de Uso .............................................................................................47
6.4 Diseño ...............................................................................................................48
6.4.1 Modularidad Dinámica. ...............................................................................48
6.4.2 Diseño Sub-Sistema Embarcado ................................................................49
6.4.3 Diseño Sub-Sistema en Servidores ............................................................50
6.4.4 Interacción con el Proveedor de Persistencia Cloud ...................................51
7 Visión de Expertos ......................................................................................................54
7.1 Carmen García Sánchez, Gerente de ASOLIF ..................................................54
7.2 Jordi Guijarro Olivares, Representante de Megha, RedIRIS ..............................55
7.3 Antonio Torralba, Dir. Dpto. de Ingeniería Electrónica, ETSI Sevilla ..................56
8 Resultados y Discusión ...............................................................................................58
9 Conclusiones...............................................................................................................60
10 Referencias Bibliográficas ...........................................................................................61
2
1 RESUMEN
La conectividad es un concepto que caracteriza la era actual. El avance en las
tecnologías de la información, combinando el de la computación y la electrónica en
general, está transformando nuestra sociedad. El transporte es un sector de gran
importancia y transcendencia que no solo no es ajeno a esta revolución, sino que está en
un punto central de la transformación actual.
El trabajo Fin de Máster “Plataformas Telemáticas para Servicios de Transporte “
profundiza en la cada vez más estrecha interrelación entre el transporte y las tecnologías
de la información centrándose en el transporte por carretera de personas y mercancías y
en particular en el potencial de las plataformas telemáticas para servicios en este dominio
de aplicación.
El trabajo toma como punto de partida aspectos planteados durante el “Máster en
ingeniería del transporte terrestre y logística” analizando los primeros esfuerzos
relevantes en la integración vehículo-infraestructuras como punto inicial para estudiar su
evolución. Se utilizan ejemplos para documentar el estado del arte y se presentan
visiones de transporte en el futuro así como distintas iniciativas para ilustrar los retos y
oportunidades a los que se enfrenta este sector.
En la evolución hacia un ecosistema de transporte sostenible masivo y
personalizado las plataformas telemáticas constituyen un elemento central para la
provisión de servicios a distintos niveles; servicios orientados al propio vehículo, al
conductor, a los pasajeros, a las mercancías, al operador de transportes, a un conjunto
de operadores, al sistema de transporte global, a sistemas externos o a la sociedad en su
conjunto. En general, el sistema podría abstraerse en términos de los nodos que
constituyen la plataforma telemática del conjunto.
El trabajo también incluye la arquitectura de un demostrador integrando
conclusiones del trabajo e intentando analizar infraestructuras actualmente en pruebas.
También se recogen respuestas a una serie de preguntas a expertos en distintas áreas,
aunque por el desarrollo del trabajo en paralelo no ha sido posible desarrollar más los
contenidos intercambiando información del resultado del trabajo, aspecto que se propone
como una posibilidad de extensión del mismo.
3
2 INTRODUCCIÓN
Una estimación reciente de 26 millones de vehículos conectados resultó en un
volumen de más de 480 Terabytes (1012 bytes) de datos. Este número se espera que
incremente a 11.1 Petabytes (1015 bytes) en 2020. Algunos vehículos híbridos son
capaces de generar 55 Gigabytes de datos en solo una hora [1]. Aunque la recolección
de información en vehículos no es algo nuevo si lo es el volumen con que esto puede
llevarse a cabo, así como las tecnologías existentes y emergentes para su explotación
que permitirán la automatización de funciones hasta el momento reservadas a los
humanos.
La integración de las plataformas telemáticas en el vehículo, combinada con la
transición a la propulsión eléctrica, presenta una gran oportunidad y a la vez un reto para
la industria del sector. Los avances en este campo se prevén transcendentales para
muchos otros sectores. Este reto no se limita a aspectos tecnológicos, se extiende a
nuevos modelos de negocio que transformarán el futuro del transporte.
La industria de tecnologías de la información, conscientes del potencial del
transporte, está llevando a cabo, desde hace algún tiempo, incursiones en este sector. El
coche en desarrollo de Apple, el de Google o Uber son solo algunos ejemplos de la gran
actividad actual. Por otra parte, la revolución derivada de la conectividad y la computación
converge con la transformación energética. La transición al vehículo eléctrico propone un
gran reto, no solo a la industria del transporte convencional, también para las
infraestructuras energéticas y la transición a energías renovables.
Observando el interior de los vehículos más innovadores actuales, como el Tesla
S o el X [2], se percibe claramente la estrecha integración de las tecnologías de la
información y el vehículo. Por otra parte, en el vehículo eléctrico una misma fuente de
energía, la electricidad, alimenta la propulsión, la electrónica y la computación,
proponiendo el transporte como una plataforma con un gran potencial de innovación
hacia la sostenibilidad global.
4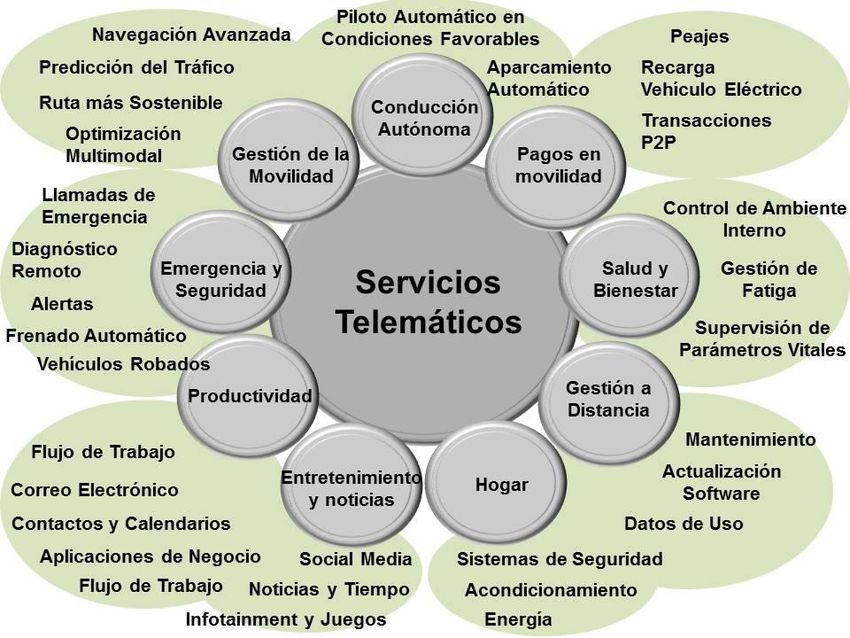
3 OBJETIVOS
3.1 Objetivo del Trabajo Fin de Máster
El objetivo del presente trabajo fin de máster es profundizar en el potencial de las
“Plataformas Telemáticas para Servicios de Transporte”. Para ello, comenzando por una
revisión de la primera gran iniciativa relevante de integración Vehículo-Infraestructura en
Estados Unidos en 2004, el trabajo presenta distintos aspectos de su evolución así como
una visión del futuro en el transporte que ayudará a posicionar las plataformas
telemáticas en contexto. La exploración de arquitecturas y soluciones actuales permitirá
extraer conclusiones y discutir los resultados.
3.2 Organización del Documento
El presente documento incluye distintas secciones cuyo alcance se describe a
continuación:
Integración Vehículo-Infraestructura. Esta sección describe la iniciativa de
integración vehículo-infraestructura más relevante durante la primera década del
siglo XXI. Podría considerarse que la misma introduce el concepto de plataforma
telemática de manera global en el sector. A continuación se describen otras
posteriores lideradas por organizaciones industriales y centradas en el transporte
pesado por carretera. El objetivo de las mismas es documentar la progresiva
integración de la plataforma telemática con la logística y con la infraestructura
energética. Finalmente se introducen tendencias que documentan niveles
crecientes de autonomía.
Plataformas Telemáticas. Una visión del futuro del transporte nos servirá para
posicionar las plataformas telemáticas en contexto. Se analizan algunas
emergentes en automoción para introducir los retos de la transformación del
sector. Posteriormente se identifican categorías de servicios relevantes sobre
este tipo de plataformas como introducción previa al concepto de pasarela
(Gateway) y su relación con las infraestructuras de computación.
5
Demostrador. En esta sección se analizan requisitos y arquitecturas para cubrir el
tipo de necesidades que se plantean en un ejemplo de plataforma telemática. Se
han identificado algunos proveedores que proporcionan servicios en estado de
pruebas para parte de la funcionalidad requerida.
Visión de Expertos. Se han identificado algunos expertos en la geografía
española para plantearles algunas cuestiones. En esa sección se recogen las
respuestas. No se ha podido interactuar en base a los resultados del trabajo
debido al hecho de que el trabajo se ha desarrollado en paralelo. Esta posibilidad
se propone como un área de posible extensión
Resultados, Discusión y Conclusiones. Para finalizar el trabajo se incluyen
secciones para resumir y discutir los resultados previamente a la exposición de
conclusiones finales y referencias externas.
6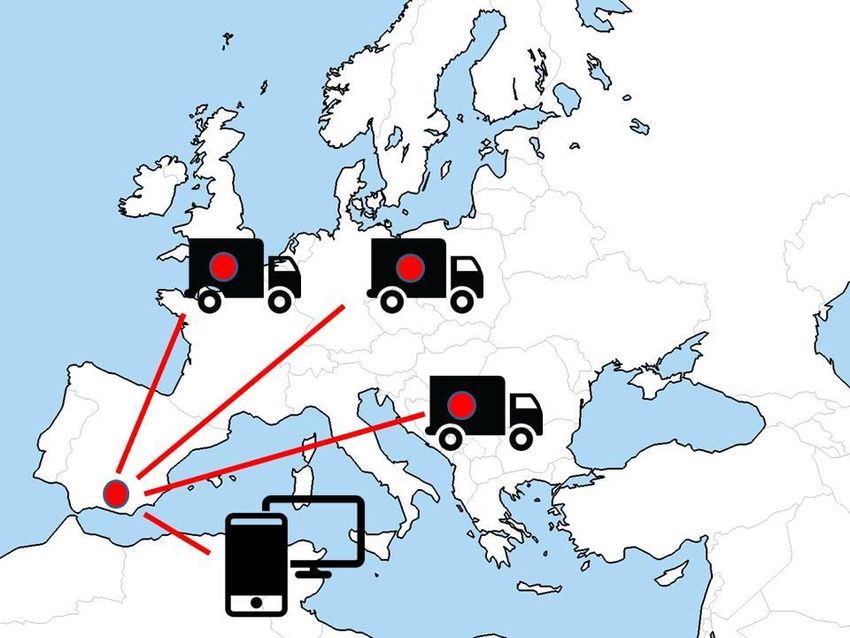
4 INTEGRACIÓN VEHÍCULO-INFRAESTRUCTURA
4.1 Antecedentes Relevantes. Proyecto VII e IntelliDrive
El reconocimiento del potencial de optimizar la integración entre las
infraestructuras físicas y el transporte en carretera para aumentar la eficiencia y la
seguridad tiene ya algún tiempo. Varias son las iniciativas en esta dirección que se han
llevado a cabo en Estados Unidos, Japón y Europa durante la primera década del siglo
XXI. De estas, probablemente la más importante ha sido el proyecto de Integración
Vehículo-Infraestructura VII, llevado a cabo en Estados Unidos y que evolucionaría
posteriormente a IntelliDrive. En Abril de 2004 estaría ya disponible un resumen de los
requisitos del sistema, “Vehicle Infrastructure Integration (VII): Requirements Summary”,
elaborado con la participación de representantes nacionales del Departamento de
Transponte y de varios estados [3].
Figura 1: Concepto Integración Vehiculo-Infraestructura VII
7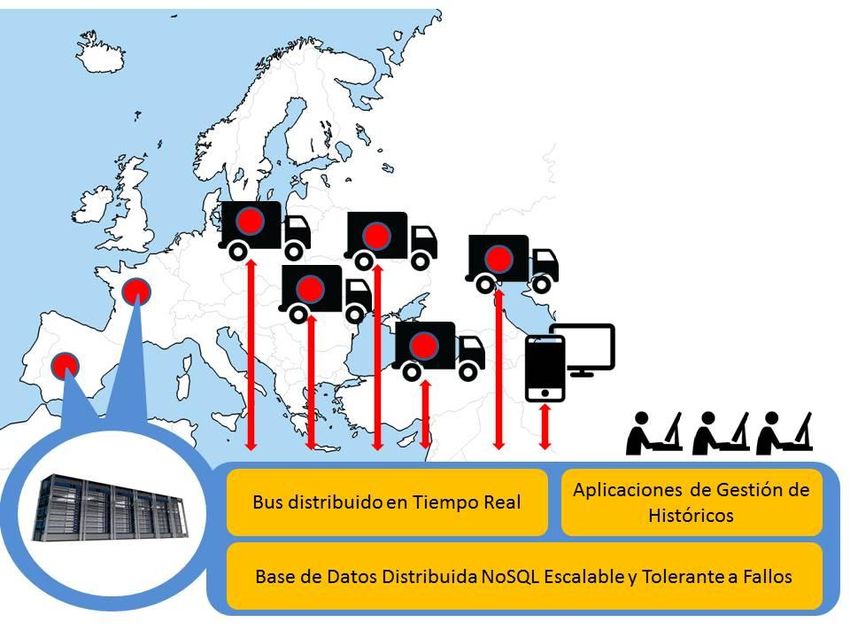
Bajo el paraguas de un consorcio en el que participaban los departamentos de
transporte federal y del estado americano, proveedores de tecnologías de la información,
asociaciones profesionales y los mayores fabricantes de automoción (Ford, General
Motors, DaimlerChrysler, Toyota, Nissan, Honda, Volkswagen y BMW) el objetivo de esta
iniciativa era promover la investigación y aplicaciones para vincular los vehículos a su
entorno. De alguna manera, algunas de estas tecnologías estaban ya presentes en otro
tipo de vehículos; por ejemplo, en el caso de los aviones se utiliza señalización en tierra
como referencia a los pilotos automáticos. El equipo embarcado, enlazado con otros
vehículos y la infraestructura en tierra, introduce el concepto de plataforma telemática en
este dominio de aplicación.
Para llevar a cabo este objetivo los vehículos, dotados de equipos embarcados, se
comunicaban con otros vehículos y el exterior utilizando bandas dedicadas. La
envergadura de la iniciativa requería el análisis de la estructura legal y de la política
necesaria para permitir el despliegue de este tipo de sistemas, optimizar los costes de las
posibles soluciones y desarrollar modelos de negocio aceptados por todos los actores
involucrados, considerando aplicaciones de seguridad, movilidad y servicios comerciales
y al usuario final.
Ya que los vehículos estaban estrechamente comunicados con la infraestructura y
con vehículos vecinos, estos disponían de información precisa de velocidad, aceleración,
orientación y evolución de los vehículos cercanos, por lo que también podían extraer
información de sus intenciones. Por otra parte, los sistema basados en comunicaciones y
en sistemas de posicionamiento de los vehículos presentan ciertas ventajas frente a los
visuales y por radar, limitados por la línea de visión. Estos últimos, en cualquier caso,
pueden complementar a los anteriores para cortas distancias. Los sensores en los
vehículos detectarían señales en los laterales de las carreteras. La información de la
infraestructura estaría almacenada en una base de datos central y podría ser distribuida
en tiempo real a los vehículos según se necesitara. La coordinación de todos estos
sistemas permitiría realizar maniobras automáticas de emergencia como cambios de
dirección, deceleración y frenado de la manera más precisa. También permitiría la
optimización global de la circulación en tiempo real haciendo obsoletos los sistemas de
señalización actuales.
Un sistema de este tipo aumentaría de manera drástica la eficiencia en el
transporte ya que la distancia entre vehículos puede ser reducida de manera importante y
la velocidad podría ser optimizada en función de las necesidades del conjunto. La
información en tiempo real facilitaría la decisión de la mejor ruta en cada momento. Por
otra parte, la información disponible durante la operación tendría una importancia
8fundamental para la evolución de la infraestructura y el diseño de nuevas vías de
comunicación.
El sistema permitía la actualización remota de los sistemas embarcados y
consideraba sistemas de seguridad para evitar daños y sabotajes en los equipos.
También tenía en cuenta los requisitos de privacidad ya que los vehículos y la
infraestructura se comunican de forma autónoma y se consideraban túneles de
encriptación dependiendo de la información enviada.
Se llegaron a realizar pruebas del concepto descrito para su evaluación en
Michigan [4] y California con participación de los mayores fabricantes de automoción.
Incluso se cubrió un área de 52 kilómetros para probar aplicaciones sobre el conjunto
vehículo-infraestructura.
Figura 2 Diagrama del Banco de Pruebas en Michigan.
9El informe final de la prueba de concepto de la integración vehículo-infraestructura
del proyecto VII incluye el resumen de resultados y conclusiones para el sistema y
aplicaciones sobre el mismo [4].
Como evolución del proyecto VII, el Departamento de Transporte Americano
introduce IntelliDrive en 2010 [5]. Muchos de los servicios en VII estaban basados en la
comunicación vehículo a vehículo (V2V). El nuevo programa argumentaba la ventaja de
darle más peso a la comunicación vehículo-infraestructura. Aunque en IntelliDrive las
comunicaciones a corta distancia seguirían basadas en tecnologías de comunicaciones
de corto alcance en los vehículos, fundamentalmente para seguridad, el nuevo proyecto
exploraría más ampliamente aplicaciones de movilidad sobre la comunicación vehículo-
infraestructura. La nueva iniciativa no llegó a tener el apoyo de la anterior y en 2011 el
Departamento de Transporte abandonaría el uso del término IntelliDrive, por solape con
otro existente, por el término genérico de “Connected Vehicle Research” manteniendo en
todo momento el vehículo conectado como eje central de la estrategia en la agenda de
investigación de Departamento de Transporte.
4.2 Vehículo-Infraestructura Logística. Daimler.
El proyecto VII, expuesto previamente, representa un esfuerzo transversal para la
integración de los vehículos y las infraestructuras. Más adelante, veremos algunas otras
más individuales en el campo de los automóviles. Sin embargo, existen también
referencias importantes en servicios telemáticos para el transporte de mercancías. En el
caso de los camiones los beneficios de la conectividad se traducen en economía de
combustible, menor tiempo del vehículo parado y mayor productividad. Estos argumentos
son los que justifican servicios representativos desplegados actualmente sobre camiones
Daimler y Volvo, entre otros.
En el caso de Daimler, actualmente se encuentra conectados en el mundo
365.000 camiones aproximadamente [6], reconociéndose en el sector que las iniciativas
de “camión conectado” transformarán radicalmente el transporte de mercancías en
carretera. Desde el 2013 la conectividad ha formado parte de la estrategia corporativa de
Daimler invirtiendo medio billón de euros en la conexión de sus camiones y en la creación
de nuevos servicios digitales durante cinco años. Como transmite la organización durante
la Feria Internacional de Vehículos comerciales en 2016, añadirá continuamente nuevos
servicios a la amplia gama disponible actualmente. Parte de su estrategia es hacer
accesible su plataforma a terceras partes. La compañía ha establecido un marco para la
transformación digital en torno al camión, reestructurando sus unidades de negocio. Una
de las estrategias fundamentales es la integración del camión con el Internet de las
10cosas. Actualmente los camiones de Daimler generan un gran volumen de información a
través de aproximadamente 400 sensores por vehículo. Estos se integran en una
plataforma software de 150 millones de líneas de código, más que un jet de pasajeros.
Figura 3: Future Truck 2025 con Conducción Autónoma de Daimler
Algunos ejemplos de los objetivos son disminuir los tiempos de carga y descarga,
evitar las congestiones de tráfico y eliminar los registros en papel gestionando
información digital en tiempo real. Actualmente se estima que el 25% de los viajes de los
camiones son en vacío. La interconexión de la información de los vehículos puede reducir
drásticamente esta cifra. Otro objetivo es reducir el impacto de las congestiones de
tráfico. Los atascos de tráfico durante el 2015, únicamente en Alemania, afectaron a los
camiones en 1,1 millón de kilómetros. La transmisión de información en tiempo real
puede ayudar a reducir esta cifra y a facilitar llevar a cabo las actividades de
mantenimiento en el momento adecuado, disminuyendo el tiempo en que el camión deja
de estar disponible.
Sobre la base de esta infraestructura, Daimler transmite la intención de contribuir
a una nueva plataforma logística abierta altamente eficiente para abordar la necesidad
creciente del transporte de mercancías. De esta forma, transporte y logística estarían
plenamente integrados.
Para lograr este objetivo, Daimler ha extendido su estrategia de plataforma a la
conectividad y a la electrónica del salpicadero. El módulo de conectividad, parte física
embarcada de la plataforma telemática, tiene el tamaño de un libro grueso de bolsillo.
Daimler llama al dispositivo “mobile router”, siendo el componente clave de las futuras
aplicaciones logísticas [7]. El módulo funciona como un “data-logger” y proporciona
11conexión del camión con el mundo exterior soportando actualmente comunicación
Bluetooth, Wifi, 4G y GNSS. Recoge información de un amplio abanico de sensores y
cámaras, almacenando la información y pre-procesándola para aplicaciones de la
plataforma telemática y en particular para interoperar con los diferentes actores de la
plataforma logística.
Este módulo reemplazará a todas las soluciones en el Grupo y podrá ser utilizado
en vehículos de otras marcas por estar basado en estándares, aunque hasta el momento
no se conoce completamente sus especificaciones. Sin embargo, la compañía anuncia su
expectativa de vender 700.000 camiones hasta el 2020, todos incorporando este
componente estandarizado.
4.3 Vehículo-Infraestructura Energética. Scania
El transporte, después de la Industria, es el mayor consumidor de energía [9]. Sin
embargo, mientras la Industria aglutina un espectro muy amplio de subsectores, el
transporte está más concentrado y los avances en innovación son más globales. Por otra
parte, es un sector altamente dependiente de los combustibles fósiles por lo que su
evolución a fuentes de energía con un posible origen renovable, como la electricidad,
contará con un gran apoyo de los gobiernos y de los usuarios finales.
Uno de los principales problemas de la infraestructura energética es el
almacenamiento de la energía. La demanda de energía no es constante por lo que la
infraestructura debe de diseñarse para la mayor demanda. Variaciones importantes de la
demanda son complejas de gestionar ya que implica poner en funcionamiento o detener
plantas de producción por la dificultad de almacenamiento. Para estimular el uso de la
energía en periodo de baja demanda es frecuente el uso de diferentes tarifas horarias.
La transición a energías renovables implica una mayor inestabilidad en la
generación ya que se hace muy dependiente de las condiciones climáticas. Esta es una
de las razones por la que existen numerosos proyectos explorando la posibilidad de
aprovechar un futuro parque de vehículos eléctricos como un gran almacén de energía
distribuido. La transición a la energía eléctrica como fuente de propulsión propone un reto
adicional en la integración vehículo-infraestructura que se extiende no solo a la
integración del vehículo con su entorno físico sino a la integración con la infraestructura
energética. El vehículo podría asumir el papel de consumidor o proveedor de energía,
según la demanda y las necesidades del usuario del vehículo, formando parte de un
sistema inteligente de recursos energéticos distribuidos.
12No es de descartar que los avances energéticos en el transporte se trasladen a
otros sectores por la capacidad tecnológica y de innovación del sector. Un ejemplo actual
en esta dirección es la incipiente penetración de las baterías de Tesla en el hogar. Por
otra parte, la posibilidad de un parque móvil con una gran capacidad de almacenamiento
de energía abre grandes posibilidades de que el transporte se convierta en un actor
relevante no solo en el campo de tecnologías de la información sino también en el
energético.
Figura 4: Demanda de Energía Global por Sector y Tipo de Combustible
Aunque el progreso en los vehículos automóviles eléctricos es conocido por todos,
el transporte pesado en carretera se enfrenta a una problemática más compleja. La
potencia y autonomía de desplazamiento necesaria difícilmente puede cubrirse con las
tecnologías de almacenamiento eléctrico actuales. Por otra parte, las baterías serían muy
pesadas y requerirían un gran consumo energético para su desplazamiento. Para evitar
este inconveniente, Siemens ha diseñado un sistema similar al de los tranvías que
permite a los camiones alimentarse con energía eléctrica en autopistas o autovías. El
sistema pasa de propulsión eléctrica a convencional o viceversa de manera automática,
al abandonar el área de suministro posible o incorporarse en ella respectivamente. En
Suecia se ha puesto en marcha un piloto con Scania [8] y se tienen previstos otros
similares en Estados Unidos.
13Figura 5: Sistema de Siemens en Suecia con Camiones Scania
Otras iniciativas recientes intentan emular el éxito de Tesla en el transporte
pesado de carretera. Este es el caso de la empresa Nikola Motor [9] que ha conseguido
2,3 billones en preventas de 7000 camiones en un breve período tras el anuncio de un
nuevo sistema combinado de propulsión. En este caso, gran parte de la energía eléctrica
se producirá en el mismo camión complementando el sistema de baterías con una turbina
de gas para mantener la carga. Con este sistema el camión tendría autonomía de unos
2000 kilómetros, una emisión casi nula y una potencia de unos 2000 caballos. Nikola
Motor propone un modelo de alquiler de 4000 a 5000 dólares al mes, estando cubierto el
coste del carburante durante el primer millón de millas, lo que compensa un ahorro del
100% en el contrato de alquiler.
De los casos anteriores deducimos que las plataformas telemáticas asumirán
también funciones de control y coordinación con el exterior de la funcionalidad asociada a
la propulsión eléctrica aunque esta dependerá del grado de integración con el exterior.
4.4 Autonomía en el Transporte por Carretera. Daimler y Volvo.
En Mayo de 2015 Daimler presentó en el estado de Nevada el primer camión del
mundo autorizado para circulación con conducción autónoma, el Freightliner Inspiration [10].
Al igual que su homólogo en Europa, en operación normal ilumina en blanco la parrilla en el
14frontal del radiador, mientras que en modo autónomo lo hace en azul. De esta manera, otros
conductores pueden identificar que evoluciona de manera autónoma.
Figura 6: Daimler-Freightliner. Convoy de Camiones Autónomos
Como servicio avanzado de conducción autónoma se considera la conducción
autónoma en cadena que permite reducir la distancia entre camiones de 50 a 15 metros,
disminuyendo, como consecuencia, el consumo de fuel en un 7% y las emisiones
asociadas. Las caravanas de camiones autónomos en autopista optimizan la eficiencia
del transporte por la importante disminución del espacio utilizado. También aumenta la
seguridad ya que el tiempo de reacción de un sistema de frenado automático es mucho
menor que el de un conductor humano, disminuyendo las probabilidades de alcance.
Actualmente el transporte conectado y optimizado es una prioridad para la firma.
En el caso de Volvo [11] son 175.000 los vehículos conectados en las carreteras
europeas [12]. Muchos envían información sobre cuando necesitan servicios de
mantenimiento y algunos de estos servicios pueden llevarse a cabo remotamente. Sin
embargo, los servicios de automantenimiento se encuentran actualmente en sus
comienzos. Estos necesitan ser integrados con el calendario de trabajo previsto. En un
futuro el camión podrá solicitar los recambios que necesitará en las estaciones de
servicio más adecuadas.
Uno de los mayores retos identificados es la gestión masiva de todos los datos
que se generan por los sistemas del camión. Por la información obtenida del análisis
15masivo de datos el camión podrá entender mejor por qué se producen los fallos y
evitarlos antes de que ocurran, pudiendo reparar de manera autónoma fallos menores o
realizar ajustes de manera automática y realizando reservas para servicio de
mantenimiento cuando sea necesario. Las labores de administración se reducirán
drásticamente ya que muchas de las funciones puede llevarlas a cabo el mismo camión,
así como las actualizaciones de software cuando sea necesario. También podrá
comunicarse con otros dispositivos, como ya es el caso con algunas funciones del móvil.
Con la incorporación de funciones de automantenimiento avanzado el camión no solo
podrá circular con autonomía sino que tenderá a poder hacerlo de forma continua.
165 PLATAFORMAS TELEMÁTICAS
5.1 Visión del Futuro del Transporte
En la sección anterior se han presentado iniciativas en curso desde el 2004. Dicha
fecha puede considerarse una referencia en la introducción del concepto de plataforma
telemática en el transporte por la escala de la iniciativa, su dimensión transversal y los
objetivos planteados. Posteriormente, se han presentado plataformas comerciales
existentes para el transporte de mercancías en carretera tomando como ejemplos
Daimler y Volvo. Las referencias previas sirven a modo de introducción para profundizar
en una visión del transporte futuro con el objetivo de posicionar la relevancia de las
plataformas telemáticas. En este caso nos centraremos en el transporte de personas,
aunque muchos de los conceptos son aplicables a personas y mercancías.
Figura 7: Vehiculo Inteligente Conectado. Ford
Una característica fundamental de la transformación tecnológica actual es que el
medio digital tiene el potencial de identificar necesidades individuales y de responder de
manera individual con unos costes muy reducidos. Esta capacidad es la que se transmite
a los distintos sectores a medida que las Tecnologías de la Información aumentan su
17penetración. Sin embargo, el transporte gestiona plataformas físicas importantes por lo
que para que esto sea posible debe integrase la información relevante de la
infraestructura de transporte para optimizar su respuesta a la demanda. La aplicación de
la inteligencia basada en la información del sistema global permitirá nuevos modelos de
negocio que modificaran sustancialmente la forma en que viajamos actualmente.
Los teléfonos móviles y las tecnologías basadas en Internet han permitido el
lanzamiento de nuevos modelos de negocio como Car2Go [15], Uber [16], BlaBlaCar [17]
etc, incluso los coches autónomos empiezan a despegar actualmente. Sin embargo, el
futuro del transporte probablemente va más allá [13].
Actualmente, utilizamos distintos medios de transporte combinados. Cada uno de
ellos tiene sus ventajas según el contexto; la bicicleta, el autobús, el metro, el coche el
avión y algunos otros. En el futuro aparecerán nuevos medios de transporte. Hyperloop
[14] es un medio de transporte que devuelve el interés del transporte neumático. Permite
el desplazamiento a alta velocidad en tubos donde se desplazan capsulas propulsadas
por motores de inducción lineal y compresores de aire.
Figure 1: Diseño del Concepto Hyperloop
18La aparición de vehículos autónomos tendrá sin duda un gran impacto en el
diseño de nuevos tipos de vehículos y en los servicios de transporte en general. La
autonomía de los vehículos y su gestión coordinada permiten la optimización en tiempo
real de la operación de la flota para cubrir la demanda. Una de las intenciones de Uber
es sustituir los conductores actuales por coches autónomos. Actualmente, los coches
pequeños de ciudad no han tenido mucho éxito ya que el modelo de propiedad impone al
comprador la restricción de elegir el modelo que responda a un promedio de su demanda.
Con un modelo de servicio no existe esta limitación ya que el vehículo a utilizar puede
adaptarse al tipo de servicio solicitado. Iniciativas de transición son los modelos de
alquiler por muy corto espacio de tiempo. Organizaciones como Car2Go [15] operan
flotas de coches distribuidos por la ciudad para su uso durante un corto espacio de
tiempo.
Es de esperar la aparición de nuevos tipos de vehículo, sin embargo, el cubrir la
necesidad de desplazamiento geográfico difícilmente podrá ser proporcionado por un
único tipo de transporte que supere a los demás en todas sus características. Por otra
parte, existe una tendencia global del transporte en propiedad hacia un servicio de
transporte. La combinación de ambas tendencias es un servicio de transporte multimodal
integrando los distintos tipos de transporte.
En muchas ciudades se está invirtiendo actualmente en la mejora del transporte
multimodal intentando combinar las ventajas de cada uno de los medios de transporte
disponibles. Moovel [20], una empresa del grupo Daimler, proporciona al usuario distintas
alternativas para cubrir su necesidad de desplazarse de un sitio a otro combinando
distintos medios de transporte. La cuestión es cómo llegar a desarrollar y optimizar un
transporte multimodal y cuál es el papel de la plataforma telemática en este contexto.
Las unidades embarcadas de la plataforma telemática tendrán distinto nivel de
inteligencia y autonomía, según el caso, y frecuentemente se apoyarán en estaciones en
tierra. Sin embargo, una de las necesidades más importantes para permitir la
automatización de un desplazamiento masivo multimodal son APIs estándares que
permitan intercambiar información en tiempo real sobre la capacidad de los medios de
transporte disponibles. Existen algunos estándares, como TransXchange [21] en el Reino
Unido, que permite intercambiar rutas y horarios. SIRI (Interfaz de Servicio para
Información en Tiempo Real) [22] es otro protocolo desarrollado por varios países
Europeos que permite intercambiar información sobre servicios de transporte público y
vehículos. El protocolo GTFS usado por Google [23] tiene un objetivo similar.
19Figura 8: Sistema Multimodal Integrado de Transporte (Ford)
El precio del desplazamiento también formará parte de este API por lo que estas
interfaces, integrando toda la información relevante, permitirán una movilidad masiva
intermodal. Por otra parte, proporcionarán una nueva infraestructura para aplicaciones
sobre la red de transporte. De manera similar, un sistema puede dar servicios al
transporte de mercancías. En este caso, no solo será necesario especificar el origen y
destino deseado sino describir las características de la mercancía. En cualquiera de los
casos el sistema puedes abstraerse en términos de nodos de computación que
representan a las unidades móviles y en muchos casos parte de la funcionalidad puede
proporcionarse de manera remota.
Resumiendo lo anterior, el transporte futuro puede resumirse como un servicio
proporcionado por un ecosistema optimizado de medios de transporte disponibles para
responder de manera personalizada a una demanda masiva.
5.2 Plataformas Telemáticas en Vehículos Automóviles
Mientras el transporte pesado por carretera, estará estrechamente relacionado
con la plataforma logística, el sector de automoción, por el número de unidades, es
donde podría esperarse mayor interrelación entre el futuro de las tecnologías de la
20información y el transporte. No es de extrañar que las iniciativas más relevantes
actualmente provengan de ambos sectores; organizaciones de tecnologías de la
información e industrias tradicionales de automoción.
Durante los próximos años el vehículo conectado irrumpirá en la industria de
automoción originando grandes cambios que empiezan a aparecer con los primeros
sistemas de conducción semiautomática en el mercado. Los fabricantes de automoción,
que siempre se han identificado hasta el momento como proveedores de producto,
tienden a evolucionar hacia proveedores de servicios de movilidad.
Según el Economist los automóviles están entre las inversiones más caras de la
población pero el 96 % del tiempo en el mismo no se dedica a otra cosa [24]. Por esta
razón el vehículo conectado abre nuevas posibilidades en muchos campos, incluyendo
entretenimiento, comercio electrónico e incluso salud, que modificarán la visión del
automóvil actual por parte de los usuarios. Estas oportunidades son también identificadas
por otros actores del sector tecnológico como Apple y Google, por lo que la integración
del vehículo y las tecnologías de la información originará un nuevo frente de competencia
entre las industrias.
En la situación actual de gran transcendencia, los gobiernos también asumen un
papel influyendo en la competencia y apoyando a la industria local. La automoción es un
sector muy regulado y decisiones gubernamentales pueden impedir o promover el
desarrollo de ciertas tecnologías.
5.2.1 Iniciativas desde la Industria de Automoción
Según un estudio anual llevado a cabo por PwC durante 2015 [15] se prevé que
las ventas de tecnología de coche conectado se multipliquen por tres en 2021,
elevándose a 122.6 billones de euros. A modo de ejemplo, en 2018 los vehículos deben
disponer de sistemas automáticos de llamada de emergencia en Europa [26]. Por otra
parte, el precio global del vehículo no crece tan rápidamente como la parte
correspondiente que se repercute sobre las capacidades digitales, implicando que el
retorno de la inversión en los componentes tradicionales se está reduciendo. En los
segmentos de gama alta se espera que esta parte crezca al 10% del total en 2021, más
del doble del actual que se sitúa en el 4%. Esta fuerte tendencia está empujando la
transformación del sector. La seguridad y la conducción autónoma son las categorías
más importantes de las nuevas inversiones, constituyendo el 61% del total.
21Actualmente se espera que la transición hacia la conducción autónoma tenga
lugar poco antes del 2020, como fecha más cercana, entendiendo que en 2025 un 20 por
ciento de los vehículos vendidos tendrán capacidades significativas de conducción
autónoma. Aunque la industria del sector de las tecnologías de la información manejan
cambios radicales, con conducción sin involucración del conductor, los fabricantes de
automóviles trabajan bajo una visión más evolutiva, incluyendo un conjunto de servicios
de asistencia al conductor que considera desde medidas pasivas, tales como
aparcamiento automático, disponible hoy día, a sistemas semiautomáticos que permiten
al usuario tomar el control en cualquier momento.
Figura 9: Audi RS7 - Record de Velocidad en Conducción Autónoma [16]
Según la industria de automoción los avances serán progresivos y en 2030
podríamos ver vehículos sin posibilidad ninguna de dirección por parte del conductor.
También reconoce que la evolución podría ser incluso más lenta, con escenarios de un
20 por ciento de penetración de vehículos autónomos en 2030.
Los principales proveedores (Tier 1) están haciendo esfuerzos importantes en
colaboración con los fabricantes considerándose Bosch [28] el más innovador y
Continental [29] en segundo lugar, seguido por Visteon, TRW y Valeo. Los desarrollos
más relevantes de vehículo conectado de la industria automoción se centran en las
siguientes áreas:
22 Vehículo Autónomo: Operación del vehículo sin conductor humano inicialmente
centrada en área concretas como aparcamiento autónomo o conducción
autónoma supervisada en condiciones favorables.
Seguridad: Definida como la posibilidad de alertar al conductor sobre problemas
en la carretera y detección automática de posibles colisiones. Entre estas se
incluyen funciones de señalización de emergencia y llamadas automáticas.
Entretenimiento: Funciones que proporcionan música y video a los pasajeros y al
conductor. Interfaces para móviles, acceso Wifi o Redes de Área Local, acceso a
redes sociales o “oficina móvil” son algunos ejemplos.
Bienestar: Funciones en torno a la salud y la competencia del conductor. Ejemplos
incluyen alertas electrónicas para detectar o reducir la fatiga y otras formas de
asistencia.
Gestión del Vehículo: orientadas a minimizar la gestión del vehículo por parte del
usuario y aumentar la comodidad de uso. El control de las funciones del coche a
distancia, presentación del estado del vehículo y servicios e información asociada
a los datos de tráfico son algunos ejemplos.
Gestión de la movilidad: Apoyo a una conducción más económica, rápida, segura
y eficiente basada en datos recogidos por el vehículo. Algunos ejemplos son
pantallas de información de tráfico en tiempo real, información asociada a
servicios y reparaciones necesarias.
Integración en el hogar, oficina y otros edificios: La integración en el sistema de
alarmas doméstico o la gestión de energía son ejemplos de esta área.
Dentro de los actores de automoción Tesla [2] merece una mención particular. Su
entrada, reciente en el mercado, se ha caracterizado por su alto nivel de innovación
fundamentalmente en el sistema de propulsión. Tesla ha sido el primer fabricante en la
producción de vehículos de serie utilizando baterías de Litio ion y los primeros en
alcanzar un rango de autonomía por encima de 200 millas (320 Km) con una única carga.
Sus vehículos también se caracterizan por el alto valor añadido en el campo de
tecnologías de la información. La última versión de software en el modelo S incluye
funciones de piloto automático utilizando una combinación de cámaras, radar, sensores
ultrasónicos y datos para conducir de manera autónoma en autopistas, cambiando de
carril y ajustando su velocidad respondiendo a la situación del tráfico. Una vez llegado al
destino, sus sensores barren el entorno en busca de aparcamiento y aparca al recibir la
orden. La pantalla del salpicadero presenta de forma sintética y en tiempo real la
información que utiliza el vehículo para determinar su comportamiento en relación con el
entorno.
23Figura 10: Tesla S - Piloto Automático Sensible al Tráfico
5.2.2 Iniciativas desde las Tecnologías de la Información
La transición hacia la movilidad como servicio supone una disrupción en la cadena
de valor actual en la automoción. Los servicios de coche compartidos tales como Uber
[16], Lyft [30] y BlaBlaCar [17] son actores intermedios en la evolución hacia el coche
autónomo ya que su objetivo es construir el grupo de usuarios y promover el servicio
compartido del vehículo frente al modelo convencional de propiedad. En enero de 2016
Lyft, empresa similar a Uber, anunció a General Motors como socio tras una inversión de
este de 500 millones de dólares [31] como parte de una campaña de financiación externa
de 1 Billón de dólares. Esta asociación se anunció por los beneficios cruzados para
ambas organizaciones en la promoción del modelo de coche compartido y autónomo. En
paralelo también se prevé que muchos vehículos autónomos estarán dedicados a cubrir
rutas específicas, como los servicios sin conductor existentes en el aeropuerto de
Heathrow.
Entre los proyectos más conocidos que surgen desde el sector de tecnologías de
la información se encuadra el coche autónomo de Google. Google contrató en el 2005 al
equipo ganador en la competición de vehículos autónomos organizada por el
Departamento de Defensa Americano “Grand Challenge”. Posteriormente, consiguió en
2012 que el estado de Nevada autorizara la circulación de vehículos autónomos [32]. Más
tarde Florida, California y Michigan se unirían a la decisión de Nevada. Aunque el primer
vehículo autorizado fue un Toyota Prius con sistemas de Google, en 2014 presentó un
prototipo sin mandos para el conductor que parece tener planes de comercialización para
el 2020.
24Figura 11: Coche de Google
El vehículo utiliza un radar LIDAR que puede proporcionar información de
precisión por la iluminación con láser, midiendo distancias con el equipo situado sobre el
vehículo. Este sistema permite obtener un modelo 3D detallado alrededor del vehículo
que se combina con mapas de mundo en alta resolución para permitirle la conducción.
Además de la computación realizada en equipos de a bordo, otras funciones se realizan
de manera remota sobre la infraestructura de computación. En Junio de 2015 Google
anuncia que sus vehículos han recorrido un millón de millas, el equivalente a una persona
media de 75 años. Durante las pruebas los vehículos no excedían la velocidad de 40
Km/h y siempre con una persona supervisando la evolución. Google ha extendido sus
pruebas al estado de Texas donde está permitido circular vehículos sin volante ni
pedales. Actualmente no ha conseguido cambios de la legislación en esta dirección en
California. En Junio de 2015 Google reconoce que los vehículos han estado involucrados
en 12 accidentes; ocho por alcance de otros vehículos en señales de stop o semáforos,
dos laterales por otros conductores, uno por un conductor que se pasó un stop y otro
cuando era conducido manualmente. Un mes después un vehículo sería de nuevo
alcanzado, originando heridas leves para el conductor, el primer accidente con daños
para los ocupantes. El vehículo tiene algunas limitaciones en condiciones atmosféricas
adversas que Google planea tener resueltas en 2020.
25Figura 12: Diseño Imaginario del Coche de Apple bajo el Proyecto Titan
En el caso de Apple son muchos los rumores e indicios que parecen confirmar
que también se encuentra trabajando en un vehículo. De acuerdo con un artículo
publicado por el Wall Street Journal [17], existe un proyecto interno denominado Titan con
el objetivo de diseñar un vehículo disponible para el 2019. Sin embargo, la compañía
mantiene en secreto su actividad en este campo aunque es conocido públicamente que
ha contratado ingenieros con gran experiencia en el sector.
5.2.3 Competencia Actual entre dos Dominios
Los fabricantes de automoción y proveedores de primer nivel (Tier 1) ofrecerán
sus propios servicios en áreas como gestión de la movilidad e integración con el hogar,
entre otros. Un ejemplo de la competencia actual en áreas estratégicas es Robert Bosch
y su alianza con TomTom, o la adquisición por BMW, Audi y Daimler de los servicios de
mapas de Nokia por 2,8 billones de euros [34], para evitar su adquisición por
competidores. Sin embargo, tras la adquisición, mantienen la autonomía de la empresa
para vender a rivales del mismo sector. La entrada de Mercedes en servicios de gestión
de flotas es otro ejemplo. También existen aproximaciones de otras empresas de
tecnologías de la información hacia el vehículo conectado. Por ejemplo, IBM se ha aliado
con Continental (Tier 1 en el sector de automoción) para el desarrollo de sistemas para
vehículos autónomos [30], campo en el que también trabaja Robert Bosch.
26Las industrias de las tecnologías de la información operan con principios muy
diferentes a las de automoción. Los fabricantes de automóviles tienen una visión de
fabricantes de producto. Ven la funcionalidad del vehículo autónomo como algo adicional
a las plataformas existentes. Los actores del sector tecnológico identifican, sin embargo,
un gran campo de oportunidades con el vehículo autónomo como el punto de comienzo.
Estos nuevos actores están acostumbrados a crear la oferta desde cero, desde una
perspectiva de servicio basado en Internet.
Los fabricantes de automóviles favorecen tecnologías propietarias vinculadas al
hardware, haciendo énfasis en la fiabilidad y en la regulación del sector. Sus ciclos de
desarrollo son largos y sus sistemas cerrados. Están basados en una jerarquía de
proveedores que no interacciona bien con la tecnología exterior. Las empresas
tecnológicas tienen menos responsabilidad sobre los sistemas previos. Valoran mucho la
velocidad en llegar al mercado, la versatilidad, el desarrollo rápido de productos y la
iteración frecuente. Muchos operan con plataformas abiertas y protocolos estándares que
pueden ser usados por un número muy grande de actores. Sus productos responden
rápido a las necesidades del usuario pero tienen limitaciones en fiabilidad y duración a
largo plazo.
Los vencedores en esta competencia deben integrar lo mejor de ambos mundos.
Deberán llegar pronto al mercado con ofertas digitales que satisfagan las expectativas de
los usuarios para escalar y dominar el mercado. Deben crear nuevos modelos de negocio
capaces de asumir las innovaciones y retornar satisfactoriamente las inversiones.
5.3 Retos en la Transformación del Sector
El coche conectado es mucho más que un nuevo paquete de opciones en un
vehículo. Es una tecnología disruptiva que modificará las estructuras actuales de la
industria de automoción, catalizando la aparición de nuevos modelos de negocio y
modificando la naturaleza del negocio en sí mismo. Sin embargo, no es una
transformación aislada. El automóvil es rápidamente una “cosa” en el “Internet de las
Cosas”. En 2020 se espera 50 billones de dispositivos conectados a Internet, 10 veces
más que la base instalada de ordenadores personales. La industria alemana únicamente
tiene previsto invertir en digitalización e Internet de las cosas 11 billones anuales.
Kugler Maag Cie [36], una consultora especializada en el sector de automoción,
analiza los cambios a implementar en las empresas del sector de automoción en un
informe elaborado con la participación de 40 expertos; directivos de la industria de
automoción, tecnologías de la información y telecomunicaciones de Europa, Estados
27También puede leer