RED DE ESTACIONES GPS ACTIVAS Y PASIVAS DE GIPUZKOA MEMORIA - Enero 2003
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

RED DE ESTACIONES GPS ACTIVAS Y PASIVAS DE GIPUZKOA
MEMORIA
Enero 2003ANEXOS:
ANEXO I: RESEÑAS.
ANEXO I.1: RESEÑAS DE LOS VÉRTICES DEL I.G.N.
ANEXO I.2: RESEÑAS DE LAS ESTACIONES DE LA RED ACTIVAS Y
PASIVAS.
ANEXO II: FICHEROS DE CÁLCULO DE LOS PROGRAMAS SKI-PRO Y
BERNESE.
ANEXO II.1: COVARIANZAS DE GFA EN ITRF00.
ANEXO II.2: AJUSTES DE LA RED.
ANEXO II.2. A) AJUSTE DE LA RED GPS DE CONTROL.
ANEXO II.2. B) AJUSTE DE LA RED PASIVA CONSTREÑIDA A
CONTROL.
ANEXO II.3: COVARIANZAS SEMANALES DE BERNESE.
ANEXO II.3. a) SEMANA 1.
ANEXO II.3. b) SEMANA 2.
ANEXO II.3. c) SEMANA 3.
ANEXO III: IGS, RECOMENDACIONES PARA PROCESAR.
ANEXO IV: PARÁMETROS DE TRANSFORMACIÓN.
ANEXO IV.1: ITRF00, ÉPOCA 2002.9 a ED50.
ANEXO IV.2: ITRF00, ÉPOCA 2002.9 a ETRS89.
ANEXO IV.3: ETRS89 a ED50.
ANEXO V: RESULTADOS.1.- Introducción. El presente documento reúne todas las incidencias acaecidas en la fase correspondiente a la determinación de coordenadas en todas las estaciones activas y pasivas en el Territorio Histórico de Gipuzkoa, dentro del concurso con nº de expediente x01054, con título: “Puesta en servicio de un sistema de posicionamiento con estaciones GPS activas y pasivas en el Territorio”. El trabajo ha sido realizado por el personal de GEOLan DONOSTI, S. L. La precisión obtenida mediante el Sistema GPS está fuera de toda discusión. Sin embargo, es fundamental determinar las coordenadas de las estaciones de referencia para poder alcanzar elevadas precisiones con bajos costes dentro de los marcos actuales de referencia. Por este motivo, se diseñó una red de precisión cuyos vértices están siempre a una distancia inferior a 10 km en cualquier parte del Territorio Histórico de Gipuzkoa. La materialización básica de la red es la de cuarto orden; concretamente, los hitos de hormigón que la Excelentísima Diputación de Gipuzkoa tiene distribuidos por todo el Territorio Histórico. En este trabajo se presentan los resultados obtenidos en la determinación de una red de estaciones GPS activas y pasivas en el Territorio Histórico de Gipuzkoa. 1.1- Objetivos. El objetivo de este trabajo es, tal y como se ha adelantado en la introducción, establecer una red de estaciones GPS activas y pasivas en el Territorio Histórico de Gipuzkoa. Sin embargo, la red ha sido diseñada para poder apoyar en ella toda la infraestructura geodésica y topográfica que se vaya a realizar en el futuro en el Territorio mencionado. Por ese motivo y, con la gran ventaja de disponer de una antena GPS activa en las instalaciones de la Excelentísima Diputación Foral de Gipuzkoa, se diseñó una red totalmente funcional, en la cual primó, además de la situación de los vértices, el acceso a los mismos. Debido a la gran precisión exigida y a que la red será el marco para los posteriores trabajos relacionados con la geoinformación, se acondicionaron las estaciones con centrado forzoso, siendo preciso el estacionamiento en ellas con basada. De esta forma, se minimiza el error de estacionamiento, tanto para la observación en sí como para los futuros trabajos. Adicionalmente, se han tomado una serie de puntos de control, que se corresponden con las pertenecientes al proyecto REGENTE (REd GEodésica Nacional por Técnicas Espaciales), de forma que se puedan determinar parámetros de transformación precisos y únicos para todo el Territorio. Cabe reseñar que las estaciones REGENTE son las establecidas por el IGN: éstas disponen de centrado forzoso y hay una por cada hoja del MTN50. Además de disponer de la red de estaciones GPS activas y pasivas, se observaron estaciones fuera del Territorio, de forma que, además de servir de marco geodésico y topográfico de precisión para el Territorio Histórico de Gipuzkoa, se cumplen los siguientes objetivos fundamentales: • Cubrir todo el Territorio con un marco de referencia preciso.
• Garantizar enlaces geodésicos con Territorios adyacentes.
• Obtener parámetros de transformación precisos y comunes para todo el Territorio.
1.2- Materiales y métodos de trabajo.
Dadas las precisiones exigidas, y los objetivos del proyecto, es fundamental que los vértices sean
estables y que el error de estacionamiento sea mínimo. Por ello, se ha diseñado una placa de acero
inoxidable con tres cuñas, de forma que el estacionamiento se realiza sobre una basada. En la figura 1,
se adjunta una imagen de una de las placas diseñadas. Las placas se adhirieron a los hitos de hormigón
con resina de epoxi, garantizándose así su estabilidad. Se optó por este tipo de señalización debido a
que los hitos tienen en su parte más elevada una placa de fundición, que hizo que cualquier otro tipo de
solución no fuera tan adecuada.
Figura 1.- Placas de acero inoxidable diseñadas.
La distribución de la red de estaciones GPS, se ha diseñado, tal y como ya se ha comentado con
anterioridad, para que desde cualquier punto del Territorio Histórico de Gipuzkoa se disponga de una
de las estaciones GPS a una distancia inferior a 10 km. Además, se tuvo muy en cuenta el acceso, de
forma que es posible acceder a la gran mayoría de las estaciones GPS en vehículo, muchas veces
incluso en turismo. En el apartado 1.3, se adjunta información más detallada acerca de la situación
general de la red y de las estaciones que la componen.
Respecto a la observación en sí, se contó con siete antenas GPS, todas ellas bifrecuencia de doce
canales en código y fase:
• 4 antenas GPS modelo Leica 520, con antenas AT502.
• 2 antenas GPS modelo Leica 9500 SR, con antena AT202.
• 1 antena modelo Leica SR530, con antenas AT502.
Los tiempos de observación fueron variables, pero todas las estaciones han sido observabas al menos
durante 2 días, en sesiones de 7 a 8 horas, como mínimo. Hay que destacar que algunas estaciones se
han observado hasta 9 días.En la tabla 1, se adjunta una relación con el nombre de cada estación y el número de días en que dicha
estación ha sido observada.
Estación Días de Estación Días de
observación observación
Aitzorrotz 2 Itxumendi* 9
Ametzmendi 4 Larrezkondo 2
Arrate 2 Mendizorrotz* 9
Artxueta* 4 Oitz* 3
Añugaña 2 Onddy 2
Belar 2 Pagoetagaña* 4
Bianditz* 4 San Telmo* 6
Garagartza 2 Urbina* 5
Intxorta Txiki 2 Usurbe 2
Iturregi* 6 Zubeltzu 2
Tabla 1.- Días de observación en cada estación.
Como se puede apreciar en la tabla 1, los puntos de control son los que se han observado durante más
tiempo. Esto se debe a que por un lado, son las más alejadas de la estación activa y, por otro lado, a
que el ajuste se realizó constreñido a dichas estaciones.
Desde estos puntos de control, se formaron polígonos, de forma que el resto de las estaciones se
encuentran a distancias muy cercanas de las de control.
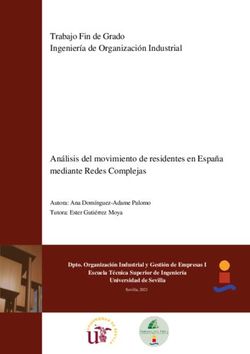
Figura 2.- Configuración de las observaciones de los puntos de control.Figura 3: la red de estaciones GPS activas y pasivas. Una vez se calculó esta red, se procedió a calcular, tomando ésta como red de estaciones fijas, el resto de las estaciones que componen la totalidad de la red de estaciones GPS activas y pasivas. Como se puede apreciar en la figura 3, la red queda compuesta por 5 polígonos, cuyos vértices quedan perfectamente definidos con una gran redundancia de observaciones. Independientemente de la configuración de la red, de las observaciones,... es imprescindible proceder de esta forma para evitar, en la medida de lo posible, sistematismos. Las observaciones GPS realizadas en épocas comunes no son insesgadas (Craymer et al, 1992). Por este motivo, al calcular las coordenadas con diferentes sesiones, se consigue eliminar los posibles sesgos para que, el ajuste mínimos cuadrados sea insesgado: es la mejor estimación lineal insesgada mínima varianza (Sevilla, 1985).
1.3- Localización.
La red se ha materializado en el Territorio Histórico de Gipuzkoa y en sus Territorios adyacentes.
En la figura 4 se adjunta un mapa donde se muestra la distribución de las estaciones GPS: los puntos
de control y la antena fija GFA se muestran en color rojo y las estaciones pasivas, en azul.
Figura 4.- Mapa de situación general.Asimismo, en la tabla 2 se detalla cada estación con sus características y su acceso. Con * se indican
las estaciones pertenecientes a REGENTE. En dicha tabla, se muestra la funcionalidad de la red, ya
que la gran mayoría de las estaciones son accesibles en turismo.
Para una descripción más detallada de cada una de las estaciones, consultar el Anexo I.
ESTACIÓN MUNICIPIO ACCESO
Aitzorrotz Eskoriatza Vehículo TT.
Ametzmendi Zarautz Turismo, y caminar 10’, o vehículo TT.
Arrate Eibar Turismo.
Artxueta* Turismo, último tramo con dificultad.
Añugaña Azpeitia Turismo, y caminar 5’.
Belar Oñati Turismo, y caminar 5’, o vehículo TT.
Bianditz* Oiartzun Turismo y caminar 30’.
Garagartza Amezketa Turismo.
Intxorta Txiki Elgeta Turismo y caminar 25’, o TT y caminar 5’.
Iturregi* Gaztelu Vehículo TT.
Itxumendi* Azkoitia- Bergara Turismo.
Larrezkondo Idiazabal Turismo y caminar 5’.
Mendizorrotz* Donostia Turismo.
Oitz* Vehículo TT, o turismo (algo complicado).
Onddy Urnieta TT por cortafuegos, o andar 30’
Pagoetagaña* Itziar Turismo y caminar 5’.
San Telmo* Hondarribia Turismo.
Urbina* Vehículo TT, o turismo (algo complicado).
Usurbe Beasain Turismo.
Zubeltzu Ventas de Irún Vehículo TT, complicado con lluvia.
Tabla 2.- Estaciones seleccionadas.2.- Desarrollo del trabajo.
Debido a que el trabajo trata sobre la precisión GPS, es necesario hacer una introducción a este sistema
de posicionamiento, de forma que, posteriormente, permita abordar los cálculos a realizar. Se puede
encontrar información más detallada en Hofmann-Wellenhof et al. (1992) y en Leick, A. (1994).
2.1- El sistema de posicionamiento global GPS.
2.1.1- Introducción.
El sistema GPS está constituido por tres segmentos bien diferenciados:
Figura 5.- Esquema de los segmentos que conforman el GPS
2.1.1.1- Segmento espacial.
Comprende la constelación NAVSTAR, que en su época de total operatividad estará formada por
veinticuatro satélites (Seeber, 1993), todos ellos en órbitas casi circulares (e=0,01), con una altitud
media de 22.200 km y un período de doce horas sidéreas. Los satélites se distribuirán en seis planos
orbitales, con una inclinación de 55º respecto al ecuador, conteniendo cada plano cuatro satélites. Esta
configuración asegurará que sobre el horizonte de cualquier lugar de la Tierra serán simultáneamente
visibles entre 4 y 7 satélites, permaneciendo aquellos que sean cenitales más de cinco horas sobre el
horizonte de la estación, por lo que tal constelación permitirá la continuidad de la observación -mínimo
de cuatro satélites - durante las veinticuatro horas del día.
La señal radiodifundida es una señal de amplio espectro (Spread Spectrum S.S), que dificulta las
interferencias y asegura las comunicaciones. Cada satélite de la constelación NAVSTAR transmite tres
señales de radio, con amplitud estable que no requieren en la etapa receptora, un control automático de
ganancia (Automatic Gain Control):
• L1 a 1575,42 Mhz
• L2 a 1227,60 Mhz
Existe una tercera frecuencia (L3), 1381,05 Mhz, que no se emplea para usos civiles en los sistemas de
posicionamiento.Se expresan con la letra L porque los valores están comprendidos en la banda L de radiofrecuencia que
abarca desde 1 Ghz hasta 2 Ghz.
L1 es el resultado de multiplicar la fundamental generada por el oscilador atómico (10,23 Mhz) por
154 y tiene una longitud de onda de 19,05 cm.
La segunda portadora L2 usa el factor 120 y una longitud de onda de 24,45 cm.
Figura 6.- Datos difundidos por el satélite.
Sobre las dos portadoras L1 y L2 se envían modulados en fase dos códigos llamados C/A y P y un
mensaje de navegación (NAVMES). Los códigos y el mensaje son una secuencia de dígitos binarios
(ceros y unos) denominados Chips.
Los códigos permiten realizar posicionamientos, mientras que el mensaje aporta información a los
usuarios del sistema.
El código C/A o código S (Standard Positioning Service) consiste en una modulación sobre la
portadora L1, con una frecuencia de 1,023 MHz y una repetición de 1.023 bits cada milisegundo,
El código P, designado también como PPS (Precise Positioning Service), modulado sobre las dos
portadoras Ll y L2, consiste en una larga secuencia (10-14 bits) de modulaciones con una frecuencia de
10,23 MHz y una duración de 267 días (38 semanas), aunque se modifica todas las semanas, y dividida
de forma tal que cada satélite tiene asignada una única fracción de una semana del código, que no
puede solaparse con la asignada a otro satélite y que sirve para caracterizarlo. Un elemento en la
secuencia del código corresponde, por tanto, a un intervalo de tiempo de unos 100 nanosegundos, lo
que equivale a 30 m en distancia, si bien la resolución puede incrementarse a nivel submétrico por
interpolación.
El código P queda absolutamente reservado por el DoD para los usuarios autorizados, en general,
militares –Fuerzas Armadas de USA, de NATO o Australians Defense Forces- y, excepcionalmente,
civiles -Defense Mapping Agency, National Geodetic Survey-. Mediante el empleo de la técnica
conocida como Anti-Spoofing (A-S), el código P es transformado en el denominado código Y,
impidiendo tanto el acceso a los usuarios no autorizados como posibles perturbaciones contra los
usuarios autorizados, quienes pueden eliminar el efecto A-S y obtener la máxima precisión que entiempo real permite el GPS; es decir, un posicionamiento absoluto instantáneo en 16 m (SEP), Caturla (1998). La mayoría de los receptores civiles utilizan el código C/A para obtener la información del sistema. Los receptores de mayor precisión y los militares emplean también el código P. El mensaje de navegación (NAVMES) contiene los datos para poder llevar a cabo los cálculos en la determinación de las coordenadas de los puntos en los que esté situada la antena del receptor. Se designa como NAVDATA, y está modulado en fase sobre ambas portadoras (L1 y L2) con una frecuencia de 50 bites por segundo. Y una duración de 12 min y 30 seg; contiene información sobre efemérides, estado de los satélites, almanaque, parámetros del reloj y modelo ionosférico (Wells et al., 1986). Por tanto, básicamente y de una forma muy simplificada, se podría ver el posicionamiento absoluto GPS como una intersección inversa respecto de los satélites que se encuentran sobre el horizonte en un momento dado. 2.1.1.2. Segmento de control. En la actualidad queda constituido por cuatro estaciones de rastreo y seguimiento, (monitor stations) y una estación principal (master control station). Las primeras realizan un seguimiento permanente de la constelación NAVSTAR, en las frecuencias que éstos emiten, y proporcionan datos precisos de las órbitas a la estación principal. La estación principal calcula las efemérides de los satélites y los coeficientes de corrección de los relojes y los transmite a las estaciones de rastreo y seguimiento. Éstas transmiten los datos a cada uno de los satélites al menos una vez al día. 2.1.1.3.- Segmento usuario. Este segmento queda constituido por todos los equipos, permanentes u ocasionales, utilizados para la recepción de las señales emitidas por los satélites y empleados para el posicionamiento (estático o cinemático) o para la precisa determinación de tiempo. En general, se conoce como receptor GPS un equipo constituido por una antena con preamplificador para captación de las señales emitidas por los VS y un receptor integrado por los elementos físicos y lógicos necesarios para el control, seguimiento, registro, almacenamiento y visualización de los datos, cálculos pre y post observación, presentación de resultados, etc. Algunos receptores (geodésicos) llevan incorporado en su interior el calculador, así como un elemento para registro de datos sobre soporte magnético, en tanto que otros precisan de un ordenador exterior, generalmente de tipo PC, y unidad de registro. Además, pueden acoplarse otros elementos exteriores, tales como un oscilador atómico, sensores meteorológicos, etc. Básicamente, todos los receptores contienen un oscilador muy estable de cuarzo, si bien tal estabilidad, fijada en el orden de 10-9 es muy inferior a la de los SV. Este oscilador genera una frecuencia fundamental, de la que se derivan todas las que, según el modo de funcionamiento, precise el proceso de medición. Diversas clasificaciones pueden establecerse para los receptores. En una primera clasificación se pueden distinguir:
A partir del tipo de señal que procesan:
• Receptores no codificados (codeless)
• Receptores codificados
En función del tipo de canales empleado:
• Multicanales.
• Multiplexadores.
• Canales conmutados.
2.1.2- Aplicaciones GPS.
Aunque concebido con fines eminentemente militares, el GPS resulta accesible a múltiples
aplicaciones puramente científicas, abarcando dos aspectos bien diferenciados:
Posicionamiento de precisión, muy adecuado para levantamientos geodésicos, geofísicos e
hidrográficos, situación de plataformas marítimas e investigación científica.
Sistema de tiempo de alta precisión, aplicable a fines de navegación, comunicaciones digitales,
metrología e investigación.
2.1.2.1- Posicionamiento.
Bajo el concepto de posicionamiento quedan incluidas dos modalidades que requieren diferentes
metodologías:
Posicionamiento absoluto.
En el que se determinan, en general, las coordenadas 3D
del receptor directamente en forma de coordenadas
cartesianas X, Y, Z y, posteriormente, de coordenadas
geodésicas (ϕ, λ h), utilizando como sistema de
referencia el convencional terrestre World Geodetic
Figura 7.- Posicionamiento
System 1984 (WGS 84).Posicionamiento relativo.
En él se calculan las coordenadas de uno o más
receptores con relación a otro fijo cuyas
coordenadas se suponen conocidas con precisión.
Figura 8.- Posicionamiento
En este caso, los errores inherentes al GPS - estados de los relojes, errores de las efemérides, errores
por efectos atmosféricos, etcétera- quedan notablemente reducidos al poder correlacionar las
observaciones simultáneas entre estaciones.
Esta modalidad requiere un tratamiento posterior a la recepción de los datos individuales que ha de
efectuarse en un centro de cálculo, por lo que el posicionamiento relativo de precisión se realiza en
tiempo diferido
2.1.2.2- Escalas de tiempo.
Tiempo Atómico Internacional (TAI): se define por la combinación ponderada de relojes atómicos por
parte del International Earth Rotation Service (IERS). La unidad de tiempo en el Sistema Internacional
de Unidades (SI) es el segundo, definido como la «duración de 9.192.631.770 períodos de la radiación
correspondiente a la transición entre los dos niveles hiperfinos del estado fundamental del átomo de
césium 133.
Tiempo Dinámico Terrestre (TDT) emplea la misma unidad de tiempo que el anterior y define una
escala de tiempo uniforme para el movimiento dentro del campo de gravedad terrestre. Se le conoce
oficialmente como Tiempo de Efemérides, por haber sido empleado para la descripción del
movimiento orbital de satélites próximos a la Tierra. El TDT se define como
TDT = TAI + 32 s .184 [1]
UT0 es el Tiempo Universal deducido directamente a partir de las observaciones estelares,
considerando la diferencia entre el día universal y sidéreo de 3 minutos y 560.055 segundos.
UT1 es el Tiempo Universal corregido por la componente rotacional inducida por el movimiento del
polo.
El UTC es el Tiempo Universal Coordinado cuya unidad es el segundo TAI. Para mantener el sistema
estable y exacto es necesario insertar segundos intercalares cuando la diferencia entre UTC y UT1 es
mayor de 0,9 s . Por tanto,
UT 1 = UTC + dUT 1 [2]Para establecer una escala de tiempo para las mediciones a satélites hay que tener en cuenta que no
esté influida por las variaciones rotacionales terrestres. Con este criterio, el US Naval Observatory
establece una escala de tiempo atómico para estos fines denominado Tiempo GPS, cuya unidad es el
segundo atómico internacional.
El origen de la escala del tiempo (TGPS) coincide con el UTC el día 6 de enero de 1980 a la 0 h. Pero
en este momento el TAI difería del UTC 19 s ; por tanto, el TGPS es equivalente al TAI menos 19 s y
mantiene esta desviación constante para que ambas escalas de tiempo atómico se mantengan uniformes
y paralelas.
El día 6 de enero de 1980 a las 0 h, el TGPS y el UTC eran coincidentes pero como UTC está sujeto a
correcciones, a fin de que su diferencia CM UT1 no sea superior a 0,9 s , paulatinamente se van
incrementando las diferencias entre TGPS y UTC.
El motivo de una definición de tiempos tan precisa, exacta y accesible se debe a la necesidad en la
determinación del retardo en la propagación entre estaciones terrestres para poder obtener así su
posición, y al hecho de poder transmitir en tiempo instantáneo de alta precisión (hasta 1000 ns ),
inalcanzable con otros sistemas de radio-recepción.
2.1.3- Técnicas de medición GPS.
Las características propias de las señales emitidas por los SV (satélites) y las relativas a la
configuración instantánea de la constelación NAVSTAR -número de SV sobre el horizonte- permiten
obtener diversos tipos de observables, que serán tratados con diferentes técnicas de medición.
Los observables de posible adquisición son:
o Pseudodistancia.
o Medición Doppler (no se va a tratar).
o Medida de diferencia de fase o interferométrica.
2.1.3.1- Pseudodistancias.
Código recibido del satélite
Réplica del código generado en el
receptor
Retardo (Medida de Pseudodistancia)Figura 9.- Código GPS recibido frente al generado.
Esquemáticamente, la técnica de posicionamiento por medidas de pseudodistancias consiste en la
determinación de un valor aproximado de la distancia SV-RC, en función del tiempo que una
determinada marca de tiempo tarda en llegar desde el satélite al receptor. Si los relojes del SV y del
RC estuviesen exactamente sincronizados, es decir, su estado relativo en el momento de la medida
fuese igual a cero, el intervalo medido en el reloj del receptor desde la salida hasta la llegada del
impulso, una vez corregido de las perturbaciones sufridas por la trayectoria, proporcionaría el valor de
la distancia al ser escalado por la velocidad de la luz. Si esta determinación se efectúa simultáneamente
sobre tres o cuatro satélites bajo los mismos condicionamientos, por un simple problema de resección -
intersección inversa de distancias o de las esferas con centro en el satélite y radio igual a cada
distancia-, tan empleado en navegación, se obtendría la posición de la estación con una precisión
función de las distancias, es decir, de la relativa a la medida del tiempo de tránsito.
En la realidad no se cumple la hipótesis considerada, puesto que existe un estado relativo entre los dos
relojes o, lo que es lo mismo, un estado de cada reloj con relación a GPS TS. Por lo que se refiere a
las perturbaciones introducidas durante la trayectoria -retardos ionosférico y troposférico,
interferencias, etc.-, se supone han sido eliminados.
Como consecuencia de la existencia de los estados de los relojes, el intervalo de tiempo medido en el
reloj del receptor -mediante la correlación del código recibido y la respuesta generada en RV-
proporciona un valor falso del tiempo de tránsito, obteniéndose a partir del mismo un valor erróneo de
la distancia, que es designado como «pseudodistancia», representada por:
( )
Pji = c ⋅ T j − t i [3]
y refiriendo las dos escalas de tiempo a GPS ST y teniendo presente que, en dicha escala de tiempo, a
un momento de recepción t corresponde un momento de emisión t − Pji / c , se puede escribir
[ ] (
Pji = c ⋅ t − ET j − t + Pji / c + Et i = Pji + c ⋅ Et i − ET j ) [4]
donde se aprecia que la diferencia entre la distancia geométrica y la pseudodistancia es precisamente la
diferencia de estados multiplicada por la velocidad de la luz. Representando esta diferencia de estados
por ∆E se obtiene
Pji = D ij + c ⋅ ∆E [5]
Generalmente, el estado del reloj del satélite ∆t i puede calcularse a partir de los datos radiodifundidos
en el mensaje de navegación y, en consecuencia, ser eliminado de (5), con lo que resulta
Pji = D ij + c ⋅ E [6]
donde E representa, para simplificar la notación, el estado del reloj RC.
Sean
d X , d Y , d Z : correcciones más probables a los valores aproximados de las coordenadas Xj, Yj, Zj del
centro eléctrico de la antena.
dE : corrección al estado del reloj del receptor.
i i i
X , Y , Z : coordenadas del satélite deducidas de las efemérides.Supuesta una observación casi simultánea (dentro del error residual de calibración de los canales del
receptor) sobre un mínimo de cuatro satélites, para cada uno de ellos se obtiene una relación de
observación de la forma (Caturla, 1988):
dp
dx +
dp
dy +
dp
dz +
dp
dE + p c + p o + v = 0 [7]
dX dY dZ dE
donde
[(
pc = X j − X i ) + (Y
2
j −Yi ) + (Z
2
j − Zi )]
2 1/ 2
[8]
y p c la pseudodistancia observada.
Un mínimo de cuatro estaciones como (7) permite calcular las cuatro incógnitas dx, dy, dz; dE en un
instante determinado. Una observación continuada de varias horas (dos o tres en general), en la que se
efectúan cálculos de las incógnitas cada poco tiempo, da lugar a un sucesivo refinamiento del valor de
las incógnitas relativas a la estación, introduciendo cada vez como valores aproximados los obtenidos
en la anterior determinación, y continuados valores del estado del reloj de RC, de los que se deducen la
marcha y el movimiento del mismo.
El método de pseudodistancias es el utilizado para el posicionamiento en tiempo real. As¡ mismo, en
posicionamiento relativo, se emplea para el cálculo de las coordenadas muy aproximadas de la
estación y los parámetros del reloj del receptor, valores que se utilizan para las más precisas
observaciones de diferencias de fase.
2.1.3.2- Medida de la fase de la portadora.
Este método, conocido abreviadamente como «diferencia de fase», consiste en medir la diferencia de
fase entre las frecuencias entrante y generada tomando como referencia la del RC.
La medida de fase puede ser procesada mediante diferentes algoritmos que utilizan como observables
la pura medida de fase, la «simple diferencia», la «doble diferencia» o la «triple diferencia», dando
lugar a diversas técnicas -fundadas todas en el auténtico observable básico que, debidamente
ponderadas, deben conducir a idénticos resultados. El proceso sólo es aplicable a posicionamiento
relativo, es decir, a la determinación de los vectores ∆X, ∆Y, ∆Z, componentes de la base.
2.1.3.2.1-Observable pura medida de fase.
Figura 10.- Observable pura medida de faseSea t el instante en tiempo GPS ST, simiultáneo con la época T j del reloj del receptor, en que se
recibe una señal con fase ϕ i procedente del satélite i , emitida en el momento to GPS ST, simultáneo
con la época t i del reloj del satélite (Caturla, 1988).
Según se deduce de las soluciones de las ecuaciones de Maxwell (Remondi), la fase ϕ i de recepción
de la señal es la misma con que fue emitida en el momento t i , es decir,
( )
ϕ i t i = ϕ i (t ) [9]
Aunque la señal se transmite continuamente y, en teoría, se recibe constantemente, es posible imaginar
que sólo un ciclo ha sido transmitido y más tarde recibido. A causa del movimiento relativo SV-RC, el
satélite se acercará o alejará de RC durante la emisión de este ciclo, lo que se denota en un cambio de
la longitud de onda (y de la frecuencia) de la señal en propagación. Este cambio es el denominado
“efecto Doppler”. Aunque una variación de la distancia modifica el espaciamiento entre picos
(máximos), no influye en el vuelo de un pico, argumento que se mantiene para todas las fases. Por
consiguiente, la fase propiamente dicha no resulta afectada por el movimiento, solamente la longitud
de onda. Esto demuestra que una fase instantánea de la portadora, observada y recibida, puede
considerarse como un evento que tiene asociado un tiempo de transmisión preciso y definido, es decir,
la fase en el momento de la recepción es la misma que la fase en el momento de la transmisión.
Ignorando los retardos atmosféricos y relativistas y las posibles pérdidas de señal y designando por p ij
la distancia geométrica o recorrido de la señal entre el satélite y el receptor, puede escribirse
( )
φ ij (t ) = ϕ i t i − ϕ j (T j ) + N ij [10]
donde ϕ representa la fase de una onda, φ la diferencia de fase o señal ya batida, y N ij es un número
entero.
Teniendo en cuenta los estados de los relojes y la invariabilidad de los mismos en el corto tiempo de la
transmisión de la señal
( )
φ ij (t ) = ϕ i t − Et i − p ij / c − ϕ j (t − ET j ) + N ij [11]
Dada la alta estabilidad de los relojes puede aceptarse
ϕ (t + ∆t ) = ϕ (t ) + f ⋅ ∆t [12]
con una precisión superior a 0,01 ciclo en un segundo.
En consecuencia, de (1) se deduce
φ ij (t ) = ϕ i (t ) − Et i ⋅ f − p ij ⋅ f / c − ϕ j (t ) + ET j ⋅ f + N ij =
( )
= ϕ i (t ) − ϕ j (t ) − p ij ⋅ f / c − f Et i − ET j + N ij [13]
ecuación referida toda ella a tiempo GPS ST, época de la recepción de la señal, es decir, de la medida
de la fase. La ecuación (13) representa un modelo instantáneo del observable pura medida de fase, en
la que quedan incluidos los estados del reloj de RC y SV.
El N ij , conocido bajo la designación de «ambigüedad», corresponde al número entero de ciclos,
desconocido, que constituyen la onda portadora comprendida entre SV y RC, desde el momento en que
es radiada hasta aquel en que es batida. En consecuencia, no contiene la fracción de ciclo -auténtica
magnitud medida- sino únicamente ciclos enteros. En el momento de recibirse la señal, una vezsincronizado el satélite, un contador de ciclos C c se pone automáticamente en funcionamiento y
comienza a contar ciclos enteros de la señal batida durante el seguimiento ininterrumpido del satélite.
Este contador puede encontrarse a cero en el momento que se desee comenzar la medida o tener ya un
valor entero y desconocido que puede designarse como «error de cero» (Ec). Si en la primera medición
Cc = N~ = N i + Ec , en una posterior medición se habrá incrementado exactamente en el número de
j
ciclos enteros recibidos durante el intervalo transcurrido, valor que será medible, permaneciendo
desconocido el inicial. Para abreviar las notaciones, se supone que el contador está puesto a cero con lo
que evitamos introducir una variable más cuyo valor es indiferente por permanecer constante a todo lo
largo de la medida. Igualmente, durante toda la sincronización, el valor inicial desconocido N ij
permanece inalterable. Pero su conocimiento es necesario para lo cual puede procederse mediante el
empleo de algoritmos que lo eliminan de las ecuaciones o puede calcularse, siendo un procedimiento
muy utilizado la cuenta Doppler.
Si durante la observación, por causas atribuibles a un defectuoso funcionamiento del receptor o a
obstáculos que se interpongan en la trayectoria, se produce una momentánea pérdida de señal con
posterior recuperación, el contador C c no registra en ese intervalo, produciéndose el fenómeno
conocido como «pérdida de ciclos» (cycle slip) que da lugar a uno de los más graves problemas
asociados a esta técnica de medida. En tal caso, la ambigüedad adquiere un valor diferente al real, lo
que se detecta en el registro de datos como un brusco salto en el historial de la fase de la portadora y
que debe resolverse tras un análisis y bien ser corregido manualmente, bien ser eliminado mediante un
adecuado proceso de cálculo. En la formulación establecida en este apartado se supone que el
problema de la pérdida de ciclos ha sido superado.
Como se aprecia en la ecuación (11), el número total de incógnitas es muy elevado, debiendo acudir
los programas de cálculo a los necesarios artificios para la eliminación de las pérdidas de ciclos y la
medición, por técnicas como las anteriormente mencionadas, de los estados de los relojes y de las
ambigüedades, recurriendo a un gran número de observaciones reiteradas cada poco tiempo, por
ejemplo cada 15 segundos, sobre cuatro o más satélites simultáneamente, para, de esta forma, calcular
los valores ajustados de las componentes del vector interestaciones ya que, esta técnica sólo se aplica
para posicionamiento relativo.
Si se establece la hipótesis de que en (13) no existen más errores que los en ella reflejados, es decir,
que las coordenadas de los satélites son suficientemente precisas, que no hay errores de propagación,
que todos los satélites son simultáneamente visibles desde las dos estaciones y que no existe pérdida de
señal, para dos estaciones, j = 1,2, cinco satélites, i = 1, 2, 3, 4, 5 y 100 observaciones continuadas, se
obtienen: 2 x 5 x 100 = 1.000 ecuaciones con seis incógnitas en coordenadas (3 por estación), 200
incógnitas de estados de reloj (100 por estación), 500 incógnitas de estado de reloj (100 por SV) y 10
ambigüedades, es decir, 716 incógnitas, lo que indica que, en las condiciones establecidas, el sistema
es superabundante.
2.1.3.2.2 Simple diferencia de fase.
Conocido también como primera diferencia (Caturla, 1988), se define este método como la diferencia
entre dos lecturas simultáneas de la fase de la portadora batida de un mismo satélite i en dos estaciones
diferentes j,k, cuya posición relativa trata de determinarse, es decir
φ ij , k = φ ki − φ ij [14]donde los observables son precisamente las fases batidas en cada estación, procedentes de aplicar la
ecuación (13) en cada una de ellas.
Sustituyendo en (14) los valores obtenidos desde (13), se tiene
( )
φ ij ,k = ϕ j (t ) − ϕ k (t ) + p ij − p ki ⋅ f / c + f ⋅ (ETk − ET j ) + N ki − N ij [15]
ecuación en que ha quedado eliminada la incertidumbre del estado del reloj del satélite, apareciendo
sin embargo el estado del reloj en la nueva estación k así como su ambigüedad correspondiente. De
forma extractada puede representarse la ecuación por
φ ij , k = dϕ j , k (t ) + dp ij , k ⋅ f / c − dET j , k ⋅ f − dN ij , k [16]
obteniéndose una similar para cada satélite observado y cada instante de observación (figura. 10).
Figura 11.- Simple diferencia de fase.
También se conoce bajo esta denominación de simple diferencia de fase la ecuación obtenida por
diferencia de dos ecuaciones (13) de pura fase procedentes de la observación simultánea desde una
estación j sobre dos satélites i = 1, 2, en la cual desaparece la incertidumbre del estado del reloj de la
estación pero se introduce el estado del reloj del nuevo satélite.
Es metodología tradicional considerar como primera diferencia la representada por las ecuaciones (15)
y (16).
2.1.3.2.3. Doble diferencia de fase.
Designada a veces como segunda diferencia (Caturla, 1988), se obtiene mediante la diferencia de dos
simples diferencias simultáneas desde las dos estaciones j y k sobre dos satélites i = 0 1,2 (figura 11).
Figura 12.- Doble diferencia de fase.Aplicando la fórmula (16) a los satélites 1 y 2 en la misma época, se deduce
[ ]
φ 1j ,,2k = φ 2j , k − φ 1j , k = dp 2j , k ⋅ f 2 − dp 1j , k ⋅ f 1 − dE j , k ⋅ f 1 + dE j , k ⋅ f 2 + dN 2j , k − dN 1j , k [17]
1
c
Por definición, las dos frecuencias f 1 y f 2 correspondientes a las portadoras L1 de ambos satélites
son idénticas dentro del margen de alta definición de los osciladores de los satélites NAVSTAR, por lo
que la ecuación (17) se reduce a
( )
φ 1j ,,2k = φ 2j , k − φ 1j , k = dp 2j , k − dp 1j ,k ⋅ f / c + dN 2j , k − dN 1j , k = ddp 1j,,2k ⋅ f / c + ddN 1j,,2k [18]
ecuación en la que han desaparecido las incertidumbres relativas a los estados de los relojes de las
estaciones y que, en consecuencia, es mucho más sencilla de tratar, razón por la cual es la utilizada
masivamente por todos los logicales que actualmente se encuentran en uso, quedando reducidos los
términos del segundo miembro a la diferencia combinada de ambigüedades. Por lo tanto, la incógnita
no relativa al vector de la base tiene carácter de sistematismo, dada su naturaleza entera. Si por algún
procedimiento puede determinarse este valor entero, todo sesgo en la solución queda eliminado,
incrementándose la precisión en la obtención de las incógnitas de posicionamiento.
2.1.3.2.4. Triple diferencia de fase.
Diferenciando dos dobles diferencias correspondientes a las mismas estaciones y satélites, pero
observados en épocas diferentes –aunque muy próximas- se obtiene el observable denominado triple
diferencia (figura 12).
Figura 13.- Triple diferencia de fase.
Para j = j, k; i = 1, 2 y t = 1, 2, de (18) se deduce
[ ]
φ 1j ,,2k (t1, 2 ) = φ 1j ,,2k (t 2 ) − φ 1j ,,2k (t1 ) = ddp 1j,,2k (t 2 ) − ddp 1j,,2k (t1 ) f / c + ddN 1j,,2k (t 2 ) − ddN 1j,,2k (t1 ) [19]
i
donde, por la propia naturaleza de N (Caturla, 1988), j
ddN 1j,,2k (t 2 ) = ddN 1j,,2k (t1 ) [20]
por lo que, en definitiva, se obtiene
φ 1j ,,2k (t1, 2 ) = φ 1j ,,2k (t 2 ) − φ 1j ,,2k (t1 ) = dddp 1j,,2k (t1, 2 ) [21]
ecuación en la que quedan eliminadas las ambigüedades, por lo que las únicas incógnitas que
permanecen son las referentes al vector de posición relativa, pudiendo el sistema ser resuelto con
facilidad.2.1.3.2.5. Combinación lineal L3, “libre de ionosfera”.
La combinación lineal:
1
L3 = ⋅ (f12 ⋅ L1 − f22 ⋅ L2 ), [22]
− f22
f12
se conoce como “libre de ionosfera”, ya que el efecto ionosférico se elimina (Leick, 1994).
Para la medida de código, se obtiene:
1
P3 = 2 ⋅ (f12 ⋅ P1 − f22 ⋅ P2 ), [23]
f1 − f22
Considerando las dobles diferencias en la medida de fase y sin tener en cuenta el efecto troposférico
∆ρklij, la combinación L3 viene expresada por:
Lij3kl= ρklij + Bij3kl, [24]
donde el parámetro “libre de ionosfera”, Bij3kl, se puede expresar como:
1
B ij3kl = 2 ⋅ (f 12 ⋅ λ1 ⋅ n 1kl
ij
− f 22 ⋅ λ 2 ⋅ n ij2kl ) [25]
f 1 − f 22
2.1.3.2.6- Órbitas de los satélites: efemérides precisas.
Hasta 1.992 la calidad de las órbitas se consideraba como un factor clave para limitar la precisión del
GPS, hasta que, a partir de Junio de 1.992, empezó a operar el IGS. Hoy día se pueden obtener órbitas
con una precisión sin precedentes en un intervalo de 13 días tras la observación. A continuación se
adjunta una tabla donde se muestran los distintos tipos de órbitas disponibles:
Órbita Precisión (m) Disponibles en Disponibles en
Transmitida 3,00 Tiempo real Mensaje de navegación
CODE, predichas 0,20 Tiempo real CODE (ftp)
CODE, rápidas 0,10 16 horas CODE (ftp)
CODE, finales 0,05 5 - 11 días CODE, IGS
IGS, ultra rápidas 0,20 3 horas IGS
IGS, rápidas 0,10 19 horas IGS
IGS, finales 0,05 13 días IGS
Tabla 3: Tipos de órbitas disponibles y sus precisiones.
A continuación se adjunta una fórmula [Bauersima, 1.983], donde se relaciona el error ∆x en una línea
base de longitud l, en función de un error orbital ∆X, para una distancia entre el satélite y receptor de
25 km:
l (km )
∆x(m ) ≈ ⋅ ∆X (m ) ≈
1
⋅ ∆X (m ) [26]
d 25
A continuación se adjunta una tabla, basada la anterior fórmula, donde se reflejan las estimaciones de
error para distintas longitudes de líneas base y errores orbitales:Error en la Long. Línea Error en la línea Error en la línea
órbita (m) Base (km) base (ppm) base (mm)
2,5 1 0,1 -
2,5 10 0,1 1
2,5 100 0,1 10
2,5 1000 0,1 100
0,05 1 0,02 -
0,05 10 0,02 -
0,05 100 0,02 0,2
0,05 1000 0,02 0,2
Tabla 4: Error para distintas longitudes de líneas base y errores orbitales.
2.2- Trabajo de campo.
Las observaciones se realizaron con algunas incidencias a destacar. En primer lugar, la observación se
llevó a cabo entre los meses de Octubre y Noviembre de 2.002, por lo que las condiciones
meteorológicas a priori no son las más adecuadas: durante estas fechas se produjeron grandes
tormentas, acompañadas de rachas de fuerte viento en ciertas zonas. Todo esto hizo que la observación
o campaña de campo no fuera todo lo continua que debiera haber sido, por lo que la campaña de
campo se prolongó para poder conseguir la precisión exigida. Las estaciones, cuyas observaciones
continuas son menores de 6 horas, no se han tenido en cuenta en el cálculo final.
En las figuras 14, 15 y 16 se observan los diferentes tiempos de observación para cada estación,
organizados por semana GPS:
Figura 14.- Ventana de observación de la semana GPS 1190.Figura 15.- Ventana de observación de la semana GPS 1191.
Figura 16.- Ventana de observación de la semana GPS 1192.
En todas las sesiones de observación se almacenaron datos cada 10 segundos, con una máscara de
elevación de 10º. En cada base, adicionalmente, se anotaron todas las lecturas de altura y constantes de
las antenas, para obtener las excentricidades sobre la vertical y también se anotaron valores de
temperatura, humedad relativa y presión atmosférica para poder realizar correcciones meteorológicas,
en caso de necesidad, en el cálculo con software científico.
Debido a que el software convencional no suele considerar dichas variables para sus cálculos, para
poder comparar los resultados de este software con el científico, no se han utilizado dichas variables.De esta forma, los resultados obtenidos con software convencional y científico quedan sujetos a los
algoritmos y modelos adoptados, no a la introducción de las variables meteorológicas.
Sin embargo, cabe destacar que el programa científico utilizado “Bernese” realiza estimaciones
troposféricas a partir de las observaciones. Debido a la calidad de los resultados así obtenidos, se
procedió a la desestimación de las variables climatológicas antes mencionadas.
2.3- Trabajo de gabinete.
Tras lo expuesto, se puede abordar el cálculo de las líneas base GPS con garantías. Cabe destacar que
se han realizado varios cálculos en función de la máscara de elevación (15º y 20º), por lo que
finalmente se adjunta el resultado con software convencional de máscara 20º, por ser el que mejores
resultados han proporcionado.
Los cálculos se han realizado con efemérides precisas del IGS. El modelo troposférico utilizado ha
sido el de Saastamoinen (1973), tal y como recomienda el IGS y el NOAA/NGS (ver anexo III):
0.002277 ⎡ ⎛ 1255 ⎞ ⎤
∆Trop. = ⋅ ⎢p + ⎜ + 0.05 ⎟ ⋅ e − tan 2 z ⎥ [27]
cos z ⎣ ⎝ T ⎠ ⎦
siendo z el ángulo cenital del satélite, p la presión atmosférica en milibares, T la temperatura en grados
Kelvin y e la presión parcial del vapor de agua en milibares.
Respecto al efecto ionosférico, éste ha sido eliminado debido a que se ha adoptado la solución L3, es
decir el modelo “libre de ionosfera” (ver apartado 2.1.3.2.5).
Cabe destacar que ha habido líneas base con grandes diferencias respecto de los valores medios, sobre
todo en aquéllas en las que han intervenido los puntos de control Oitz y Artxueta. Las diferencias se
han detectado con software convencional, pues con software científico han sido valores normales. Esta
circunstancia se pueden deber a:
• Son dos de los vértices más alejados de GFA, o
• Están rodeados de estaciones de emisión tanto de televisión como de radio y telefonía.
Sin embargo, son estaciones REGENTE, por lo que se hizo imprescindible disponer de ellas. De
cualquier forma, los resultados finales son los esperados, como se observa en el apartado 3.
Respecto al ajuste en sí, éste se ha realizado por mínimos cuadrados. En el apartado 2.3.1 se detalla el
modelo matemático que el software convencional utilizado emplea, así como las definiciones de
fiabilidad, precisión,... que se corresponden con los valores obtenidos para la red.
La red ha sido calculada en el marco ITRF2000, para lo cual previamente se calculó la estación activa
GFA en dicho marco (véase el apartado 2.3.2.1)
Debido a las grandes precisiones a alcanzar y a la necesidad de referir las coordenadas a estaciones
globales, es necesario calcular las coordenadas de la red con sumo rigor y con las máximas garantías.
Por ello, adicionalmente al procesamiento con “software comercial”, concretamente la versión 2.5 del
software SKI- Pro de Leica, se ha calculado la red con software científico Bernese, versión 4.2. Los
resultados se adjuntan en el apartado 2.3.2.2.De cualquier forma, si bien los datos considerados como definitivos son los obtenidos con el software Bernese, se adjuntan los parámetros y modelos utilizados por el software SKI Pro, pues son los que pueden ser tenidos en cuenta para futuras campañas locales. 2.3.1. Ajuste de la red: precisión, fiabilidad y pruebas estadísticas. Software comercial. La nomenclatura utilizada en este apartado ha sido extraída del manual del usuario del software SKI Pro, versión 2.5, de la marca comercial Leica. De esta forma, se exponen los criterios adoptados con ese software en particular. Sin embargo, como ya se ha comentado, la solución definitiva ha sido la obtenida con software científico “Bernese”. 2.3.1.1. Ajuste por mínimos cuadrados. En esta sección se presentan los conceptos básicos del ajuste por mínimos cuadrados, así como los conceptos de modelos matemáticos y estocásticos. Se explican también algunas nociones importantes empleadas en SKI-Pro, tales como valores aproximados, parámetros adicionales que no se aplican muy frecuentemente y ajustes forzados. 2.3.1.1.1. Ajuste por mínimos cuadrados: Consideraciones generales. Entre los geodestas y topógrafos, es una práctica común realizar un mayor número de mediciones que las originalmente planeadas, al establecer una red geodésica. De esta forma, se podrán compensar las observaciones en caso de que algunas de ellas se pierdan, pero (más importante aún) para poder mejorar la calidad de la red. Como consecuencia de estas mediciones adicionales, ya no existe solamente una solución única que satisface las condiciones de la red en forma exacta (por ejemplo, que los ángulos de un triángulo deban sumar 200 gon). Por lo tanto, se requiere de un método para corregir las observaciones, con el fin de cumplir con las especificaciones señaladas. La cantidad en la que cada observación se debe corregir se conoce como residual de la observación. El método de ajuste por mínimos cuadrados provocará que las observaciones entren en el modelo al minimizar la suma de los cuadrados de los residuales de las observaciones. Los residuales están referidos a las correcciones por mínimos cuadrados. Cualquier modelo de ajuste por mínimos cuadrados consiste de dos componentes igualmente importantes: el modelo matemático y el modelo estocástico. El modelo matemático es una serie de relaciones entre las observaciones y las desconocidas. El modelo estocástico describe la distribución esperada de los errores de las observaciones. 2.3.1.1.2. Modelo Matemático. Generalmente en un levantamiento, los observables no constituyen cantidades, las cuales son las que se espera obtener. Más bien, se emplean las observaciones para determinar parámetros desconocidos, como pueden ser las coordenadas de las estaciones en una red. Las observaciones se expresan como una función de los parámetros en el llamado modelo matemático o funcional. En algunos casos, el modelo que representa las relaciones entre los observables y los parámetros desconocidos es muy sencillo. Por ejemplo, la relación en un problema de nivelación en 1 dimensión entre las diferencias de alturas observadas y las alturas desconocidas, es completamente lineal:
Resulta más complicado el caso de una red GPS en la que los elementos desconocidos son las
coordenadas (X,Y,Z) a determinar en un sistema de referencia diferente al cual están referidas las
líneas base ∆X:
con
α, β, γ, µ como parámetros de transformación.
Ya que el método de mínimos cuadrados requiere de ecuaciones lineales, el modelo aquí mostrado se
debe hacer lineal. Generalmente, esto significa que se requiere de un cierto número de iteraciones para
obtener una solución. Asimismo, también se requiere de valores aproximados en el ajuste para las
coordenadas de las desconocidas. Si los valores aproximados son incorrectos, se puede provocar un
incremento en el número de iteraciones o, en el peor de los casos, impedir que converjan.
Ya que nuestro interés se enfoca en las coordenadas, no siempre se emplean los otros valores
desconocidos en el modelo matemático. Valores desconocidos, tales como los parámetros de
transformación antes mencionados, se denominan como parámetros adicionales o entorpecedores.
Ejemplos de este tipo de parámetros son: los parámetros de transformación, factores de escala, offsets
de acimut, orientación de valores desconocidos y coeficientes de refracción. Algunos de estos
parámetros se pueden mantener como fijos con un cierto valor, en cuyo caso no se corrigen en el
ajuste. La decisión de mantener fijos ciertos parámetros no es sencilla: se debe poner especial cuidado
en no ser demasiado estrictos ni dejar demasiados grados de libertad. Un ejemplo de lo anterior es la
introducción de coeficientes de refracción, ya que puede resultar en la admisión de efectos sistemáticos
que no son causados por la refracción. Sin embargo, el ignorar la refracción, cuando efectivamente
ejerce influencia sobre las mediciones, tendrá como resultado un efecto igualmente desfavorable. El
éxito de lo que podría llamarse “equilibrar” el modelo, dependerá mayoritariamente de la experiencia
del usuario.
En SKI-Pro se puede estimar un factor de escala para las mediciones de distancia. El objetivo de
introducir un factor de escala en el ajuste consiste en evitar un posible sesgo en la escala interna del
equipo de medición y, en términos más generales, prevenir una limitación exagerada de la red durante
un ajuste libre. Un factor de escala libre 'encogerá' o 'extenderá' la red para que esta se adapte a las
estaciones conocidas en un ajuste forzado. Como consecuencia, en algunos casos un factor de escala
libre puede obstruir la aplicación de pruebas estadísticas sobre las coordenadas conocidas. Las
coordenadas de una estación conocida pueden quedar fuera de los límites promedio y no detectarse
cuando, debido al efecto de 'encoger' o 'extender' la red, esta siga siendo forzada a adaptarse (sin
ningún rechazo) a las estaciones conocidas. El valor en cuestión (que excede los límites promedio) será
absorbido por el factor de escala, el cual como consecuencia, tendrá un valor diferente a 1.0 . Por lo
tanto, se recomienda analizar el valor del factor de escala después de efectuar el ajuste y, en caso de
duda, volver a efectuar el ajuste con una escala fija.
El ajuste fallará cuando el modelo matemático, tal como se representa por la matriz de diseño y la
matriz normal (véase el apartado 2.3.1.1.5), tenga características de singularidad. La singularidad es
causada por:• un problema de mal diseño o; • un modelo planteado erróneamente. El problema de un mal diseño consiste en que quizás se espera demasiado de las observaciones, o se incluyeron muy pocas. Un ejemplo de esto es la determinación de coordenadas en dos dimensiones de una estación desconocida mediante la medición de una sola dirección horizontal, a partir de otra estación. Un modelo se plantea erróneamente cuando se incluyen demasiados parámetros. Generalmente, estos modelos no son una representación fidedigna de la realidad. En el caso de soluciones computarizadas mediante mínimos cuadrados, la condición de mal diseño de la matriz N puede derivar en una característica de singularidad. La característica de singularidad es el caso limitante de un mal diseño. Una matriz de mal diseño puede adquirir la característica de 'singularidad' como resultado de los límites internos de precisión del hardware empleado. Un ejemplo de este problema es la intersección de una estación por dos o más direcciones paralelas cercanas a aquella. Además de los problemas mencionados, no es posible resolver un ajuste de observaciones terrestres a menos que se haya establecido la ubicación, la orientación y la escala de la red, es decir, que se haya definido un datum. Esto se logra imponiendo límites a la solución. El número mínimo de límites dependerá de las dimensiones de la red. En una red 3D existen 3 translaciones, 3 rotaciones y un factor de escala. La singularidad se elimina al fijar por lo menos 7 coordenadas de 3 estaciones (Lat1, Lon1, Alt1, Lat2, Lon2, Alt2,Alt3). 2.3.1.1.3. Modelo Estocástico. Una observación geodésica, tal como una dirección, distancia o diferencia de alturas, es una variable aleatoria o estocástica. Una variable estocástica no puede ser descrita por un solo valor exacto, ya que existe una gran incertidumbre involucrada en el proceso de medición. Por ejemplo, al medir repetidamente la distancia entre dos estaciones se obtendrá un amplio rango de diferentes valores. Esta variación se toma en cuenta para calcular la probabilidad de la distribución. Lo anterior significa que, además del modelo matemático, es necesario formular un segundo modelo que describa las desviaciones estocásticas de las observaciones: el modelo estocástico. En el caso de observaciones geodésicas, se asume una probabilidad de distribución normal (Figura 17). Esta distribución se basa en la media µ y la desviación estándar σ.
También puede leer