Navegación para Robots Móviles - Alberto Ortiz
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación
Dpt. de Matemàtiques i
Informàtica
Universitat de les Illes
Balears
Navegación para
Robots Móviles
Alberto Ortiz
Grupo de
Sistemas,
Robótica y
Visión
Índice
El problema de la Navegación en robots móviles
Métodos de (auto)localización
Representación de mapas
Odometría
Otros:
probabilísticos basados en mapas (sólo mencionar)
SLAM (sólo mencionar)
otros: balizas, landmarks, etc.
Planificación de caminos
Evitación de obstáculos
Bibliografía
Alberto Ortiz 2
1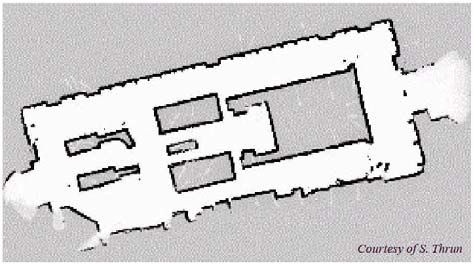
El problema de la Navegación
La navegación es la habilidad
que caracteriza a un robot móvil
y al mismo tiempo la más
desafiante
El problema de la navegación
para un robot móvil se define
como:
Dado un punto de partida A
alcanzar el (los) punto(s) de
destino B (B1,B2,...)
utilizando su conocimiento [el
del robot] y la información
sensorial que recibe [el robot].
Alberto Ortiz 3
El problema de la Navegación
La navegación implica resolver subproblemas a nivel de:
interpretar los datos que le suministra sus
PERCEPCIÓN
sensores para extraer información útil
LOCALIZACIÓN determinar su posición en el entorno
... el robot debe
ser capaz de ...
PLANIFICACIÓN decidir cómo actuar para alcanzar el objetivo
CONTROL DE gestionar sus actuadores para conseguir la
MOVIMIENTO trayectoria deseada
(enfoque deliberativo)
Alberto Ortiz 4
2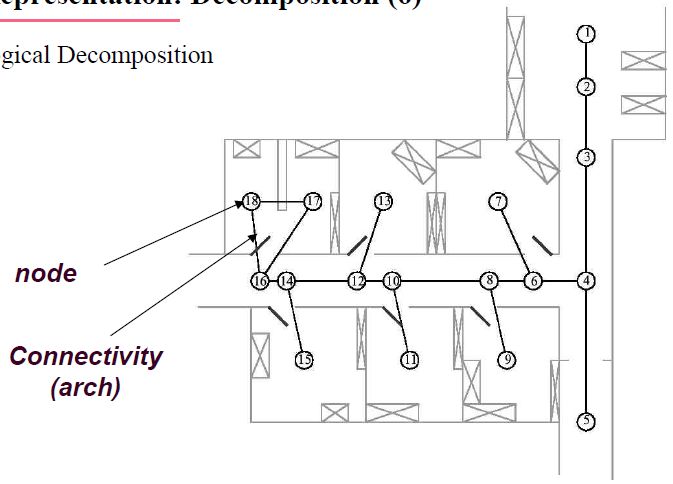
El problema de la Navegación
Dos situaciones a distinguir:
existe un mapa del entorno (suficientemente adecuado para la
navegación) ⇒ planificación de caminos (análisis global)
no existe un mapa
1) construir el mapa por exploración del entorno (SLAM, Simultaneous
Localization And Mapping) y luego planificar caminos
2) navegar sin mapa – control reactivo basado en comportamientos
en ambos casos, es posible que aparezcan obstáculos en el camino de
cuya existencia no se tenía conocimiento ⇒ evitación de obstáculos
(análisis local)
Sea como sea, es necesario disponer de información de
posición del robot ⇒ (auto)localización
(relativa) respecto al inicio del movimiento
(absoluta) respecto a un mapa
Alberto Ortiz 5
Índice
El problema de la Navegación en robots móviles
Métodos de (auto)localización
Representación de mapas
Odometría
Otros:
probabilísticos basados en mapas (sólo mencionar)
SLAM (sólo mencionar)
otros: balizas, landmarks, etc.
Planificación de caminos
Evitación de obstáculos
Bibliografía
Alberto Ortiz 6
3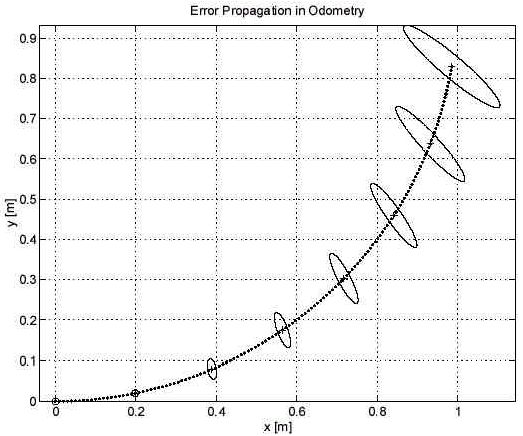
Métodos de Localización
Localización implica conocer la posición del robot
respecto de un sistema de coordenadas
GPS, pero, actualmente, plantea problemas:
precisión (metros)
no disponible en todos los entornos (cerrados, submarinos, ...)
necesidad de ver un cierto número de satélites
la señal puede tener dificultad para penetrar en entornos cerrados
atenuación significativa de la señal en entornos submarinos
necesidad de información de posición relativa respecto de
elementos del entorno ⇒ MAPA
Resto de sensores (también GPS) suministran información de
posición con un cierto nivel de precisión y completitud ⇒
localización no es trivial
Alberto Ortiz 7
Índice
El problema de la Navegación en robots móviles
Métodos de (auto)localización
Representación de mapas
Odometría
Otros:
probabilísticos basados en mapas (sólo mencionar)
SLAM (sólo mencionar)
otros: balizas, landmarks, etc.
Planificación de caminos
Evitación de obstáculos
Bibliografía
Alberto Ortiz 8
4
Métodos de Localización
Mapas:
La representación ha de ser acorde con la precisión del
posicionamiento del robot
La fidelidad de la representación de la posición del robot está
limitada por la fidelidad del mapa
A la hora de escoger un tipo de mapa se ha de tener en cuenta
que:
la precisión del mapa debe ser adecuada para la tarea
la precisión del mapa debe ser acorde al tipo de información
suministrada por los sensores que se emplean para navegar
la precisión del mapa influye en el coste computacional de las
tareas que lo utilizan
Alberto Ortiz 9
Métodos de Localización
Tipos de mapas:
de representación contínua: elementos del mapa se
representan en un espacio de coordenadas continuo
de representación troceada: fidelidad limitada
descomposición exacta (del entorno)
descomposición (del entorno) aproximada por celdas
celdas de tamaño fijo (rejillas/mapas métricos)
celdas de tamaño adaptativo
descomposición (del entorno) aproximada a nivel topológico
(mapas topológicos)
Alberto Ortiz 10
5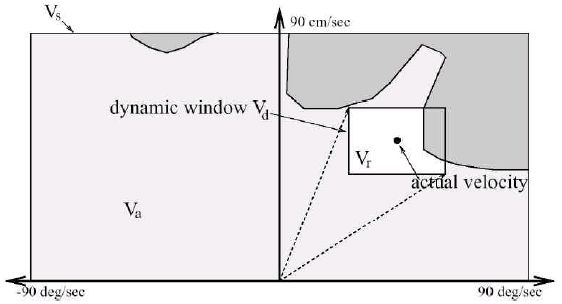
Métodos de Localización
Representación continua:
a) mapa arquitectónico
b) segmentos rectos
Alberto Ortiz 11
Métodos de Localización
Representación troceada: descomposición exacta
“embaldosado” de áreas
libres
exige poligonalizar el
entorno
contiene información
topológica de forma
natural
Alberto Ortiz 12
6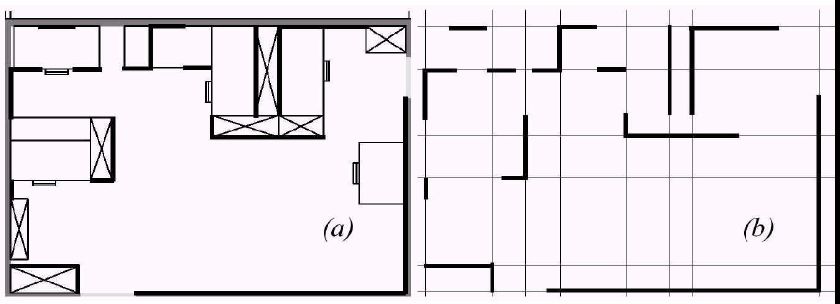
Métodos de Localización
Representación troceada: descomposición aproximada
celdas de tamaño fijo - rejillas/mapas métricos
pasillos estrechos pueden desaparecer debido a la discretización del
espacio
rejilla de ocupación: blanco = espacio libre,
negro = espacio ocupado,
Alberto Ortiz
gris = ? 13
Métodos de Localización
Representación troceada: descomposición aproximada
celdas de tamaño fijo - rejillas/mapas métricos
ejemplo con celdas de tamaño reducido
Alberto Ortiz 14
7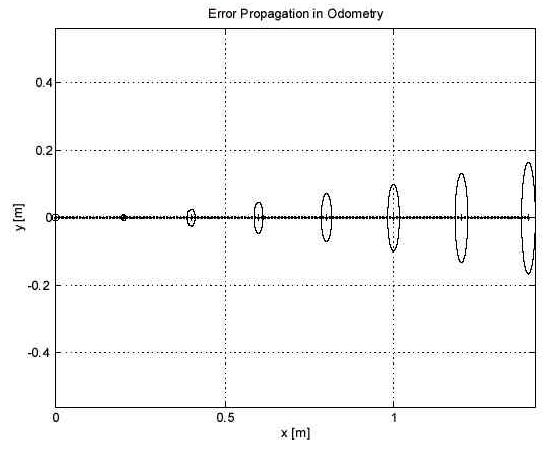
Métodos de Localización
Representación troceada: descomposición aproximada
celdas de tamaño adaptativo: refinamiento en 4 mientras un
rectángulo no sea completamente espacio libre o espacio
ocupado
Alberto Ortiz 15
Métodos de Localización
Representación troceada: descomposición aproximada
mapas topológicos
Alberto Ortiz 16
8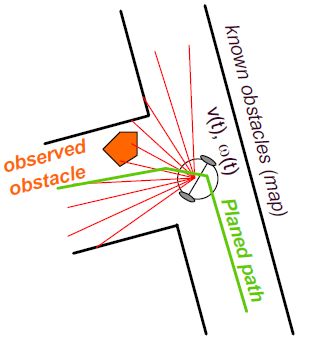
Índice
El problema de la Navegación en robots móviles
Métodos de (auto)localización
Representación de mapas
Odometría
Otros:
probabilísticos basados en mapas (sólo mencionar)
SLAM (sólo mencionar)
otros: balizas, landmarks, etc.
Planificación de caminos
Evitación de obstáculos
Bibliografía
Alberto Ortiz 17
Métodos de Localización
Odometría
Método sencillo para estimación de posición
basado en sensores de medición de giro de rueda (≡ longitud de
paso en un robot humanoide)
∆α ½
∆sr : rueda dcha
Rw ∆α ⇒ ∆s = Rw (∆α) →
∆sl : rueda izda
posición + postura actual = acumulación de desplazamientos
(integración de camino)
x(t + ∆t) x(t) ∆x
y(t + ∆t) = y(t) + ∆y
θ(t + ∆t) θ(t) ∆θ ∆t
Alberto Ortiz 18
9Métodos de Localización
Odometría: robot con tracción diferencial
∆sr + ∆sl
∆s =
2
∆sr − ∆sl
∆θ =
b
∆x = ∆s cos (θ + ∆θ)
∆y = ∆s sin (θ + ∆θ)
(b = distancia entre ruedas)
¡ ¢
∆sr +∆sl
cos θ(t) + ∆sr −∆s l
x(t + ∆t) x(t) 2 b
¡ ¢
y(x + ∆t) = f (x, y, θ, ∆sr , ∆sl ) = y(t) + ∆sr +∆sl
sin θ(t) + ∆sr −∆s l
2 b
θ(t + ∆t) θ(t) ∆sr −∆sl
b
Alberto Ortiz 19
Métodos de Localización
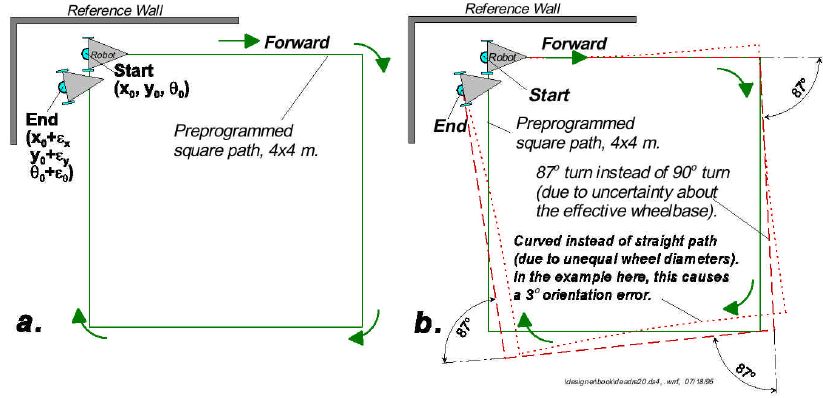
Odometría: robot con tracción diferencial
¿Qué ocurre si hay errores en las mediciones de ∆sl y/o ∆sr?
sistemáticos (deterministas) ⇒ calibración
desalineación de las ruedas
incertidumbre en el diámetro de las ruedas (diferentes diámetros,
rueda desinchada, rueda deformada, ...)
no sistemáticos (no deterministas)
resolución limitada del sensor
una o las dos ruedas patinan
suelo desigual, etc.
Errores independientes y proporcionales a la distancia ⇒
desplazamiento depende de (∆sr ± kr |∆sr |, ∆sl ± kl |∆sl |)
⇓
(x ± δx, y ± δy, θ ± δθ)
Alberto Ortiz 20
10Métodos de Localización
Odometría: robot con tracción diferencial
Alberto Ortiz 21
Métodos de Localización
Odometría: robot con tracción diferencial 2
δxx 2
δxy 2
δxθ
µ ¶
kr |∆sr | 0 2
Σrl = cov(∆sr , ∆sl ) = ⇒ Σp = cov(x, y, θ) =
δyx
2
δyy 2
δyθ
0 kl |∆sl |
2 2 2
δθx δθy δθθ
Σp(t+∆t) ≈ Fp Σp(t) FpT + Frl Σrl Frl
T
[p.e. Σp0 = 03×3 ] (faltan dependencias de t)
³ 1 0 −(∆s)sθ
´
Fp = ∂f ∂f ∂f
= 0 1 +(∆s)cθ
∂x , ∂y , ∂θ " #
0 0 1 sθ = sin(θ + ∆θ)
cθ ∆s
− b sθ cθ ∆s
2 + b sθ cθ = cos(θ + ∆θ)
³ ´ 2
∂f
Frl = ∂∆s r
∂f
, ∂∆s l
= sθ ∆s sθ ∆s
2 + b cθ 2 − b cθ
1
b − 1b
(Siegwart, Nourbakhsh, Introduction to Autonomous Mobile Robots, pp. 186-190)
Alberto Ortiz 22
11Métodos de Localización
Odometría: robot con tracción diferencial
Alberto Ortiz 23
Métodos de Localización
Odometría: robot con tracción diferencial
Alberto Ortiz 24
12Métodos de Localización
Odometría
Error de estimación de posición no está acotado (cada vez es
mayor)
Utilizar sensores de orientación adicionales (p.e. giróscopo,
INS, etc) puede ayudar a reducir el error acumulado pero no
resuelve el problema
odometría(ruedas) + sensor(es) de orientación = dead reckoning
⇒ métodos de localización más sofisticados:
localización probabilística en base a mapas (Markov, filtros de
Kalman,...)
SLAM (Simultaneous Localization and Mapping)
otras técnicas: balizas, landmarks, etc.
Alberto Ortiz 25
Índice
El problema de la Navegación en robots móviles
Métodos de (auto)localización
Representación de mapas
Odometría
Otros:
probabilísticos basados en mapas (sólo mencionar)
SLAM (sólo mencionar)
otros: balizas, landmarks, etc.
Planificación de caminos
Evitación de obstáculos
Bibliografía
Alberto Ortiz 26
13Métodos de Localización
Localización basada en rutas:
La ruta que ha de seguir el robot es explícitamente
señalizada:
raíl
raíles enterrados y electrificados; el robot se guía en base al
efecto inductivo sobre bobinas embarcadas
marcas ópticas en el suelo
marcas en el suelo realizadas con pintura ópticamente
transparente que refleja en el rango ultravioleta
Unmanned Guided Vehicles (UGV)
No es posicionado absoluto, la guía le indica cuál es la
siguiente posición a alcanzar
Alberto Ortiz 27
Métodos de Localización
Localización basada en balizas: balizas de tiempo de vuelo
robot emite señal y espera respuesta de balizas:
(tA,tB,tC) → (dA,dB,dC)
B = (xB,yB) (1) (x − xA )2 + (y − yA )2 = d2A
dB (2) (x − xB )2 + (y − yB )2 = d2B
(3) (x − xC )2 + (y − yC )2 = d2C
P = (x,y) dA A = (xA,yA)
• (xA , yA ), (xB , yB ), (xC , yC ) conocidos
dC • (dA , dB , dC ) conocidos
• (x, y) desconocidos
C = (xC,yC) F resolver (1,2) y (2,3) p.e. y tomar
soluciones para (x, y) que coincidan
posición 3D (p.e. entorno submarino) requiere 4 balizas
Alberto Ortiz
(intersección de 4 esferas ⇒ 3 incog.) → LBL 28
14Métodos de Localización
Localización basada en balizas: balizas visuales
α = ](P A, XR ) ∆yA = ∆xA tan α
β = ](P B, XR ) ∆yB = ∆xB tan α yA + ∆yA = yB + ∆yB
γ = ](P C, XR ) ∆yC = ∆xC tan α yA + ∆yA = yC + ∆yC ⇒
yB + ∆yB = yC + ∆yC
B = (xB,yB)
XR
yA + (tan α)(∆xA ) = yB + (tan β)(∆xB )
YR
yA + (tan α)(∆xA ) = yC + (tan γ)(∆xC )
∆yA
P = (x,y) yB + (tan β)(∆xB ) = yC + (tan γ)(∆xC )
A = (xA,yA)
• (xA , yA ), (xB , yB ), (xC , yC ) conocidos
∆xA
• (α, β, γ) conocidos
C = (xC,yC) • (∆xA , ∆xB , ∆xC ) desconocidos
Alberto Ortiz 29
Métodos de Localización
Localización basada en landmarks
landmark = marcas u objetos pasivos inmersos en el entorno
cuya posición (relativa o absoluta) es conocida
artificiales: marcas de colores o formas características, códigos
de barras, etc.
naturales: puerta, esquina, roca, árbol, etc.
estimación de posición por triangulación (lo de antes) o bien
al alcanzar el landmark
Alberto Ortiz 30
15Métodos de Localización
Localización híbrida odometría/balizas/landmarks
landmarks y balizas proporcionan información precisa de
posición ⇒ cada vez que el robot ve balizas suficientes o bien
alcanza un landmark, el error de posición pasa a ser 0 !!!
⇒ n utilizar odometría mientras el robot no ve suficientes balizas
para hacer triangulación / mientras no alcance un landmark
o ajustar posición al ver suficientes balizas / al alcanzar un
landmark
Alberto Ortiz 31
Índice
El problema de la Navegación en robots móviles
Métodos de (auto)localización
Representación de mapas
Odometría
Otros:
probabilísticos basados en mapas (sólo mencionar)
SLAM (sólo mencionar)
otros: balizas, landmarks, etc.
Planificación de caminos
Evitación de obstáculos
Bibliografía
Alberto Ortiz 32
16Planificación de Caminos
Completitud
Un sistema (robótico) se dice completo si y sólo si, para todos los
posibles problemas (mapas, objetivos, estados iniciales), cuando
existe una trayectoria al objetivo, el sistema lo alcanza
De forma más precisa:
un sistema (robótico) se dice completo si y sólo si, para todos los
posibles problemas (...), cuando existe una trayectoria al estado
objetivo, el sistema alcanza ese estado
Cuando un sistema es incompleto, entonces existe un problema
(configuración de objetivo, mapa y estado inicial) para el que el
sistema no es capaz de encontrar una solución aunque exista.
[solución = trayectoria que resuelve la navegación]
Completitud versus complejidad computacional
Alberto Ortiz 33
Planificación de Caminos
Problema muy estudiado para manipuladores industriales
manipulador con k articulaciones, ¿secuencia de movimientos segura?
(no impacta con ningún obstáculo)
configuración = (θ1, θ2, ..., θk) → espacio de configuraciones k-dimens.
SOL. = trayectoria sobre el espacio libre del espacio de configuraciones
velocidad importante (impacto económico) → cinemática + dinámica
Alberto Ortiz 34
17Planificación de Caminos
Robótica móvil (robots con ruedas)
menos grados de libertad [como mucho (x,y,θ)] ⇒ problema
más sencillo
además:
menor velocidad ⇒ dinámica no es relevante
robots pueden girar en el sitio (tracción diferencial)
robot es un punto ⇒ configuración = (x,y)
“hinchar” obstáculos en el radio del robot para compensar
variantes = métodos basados en ...
mapas de carreteras (MMC)
mapas troceados (MMT)
campos de potencial (MCP)
¡Necesitamos disponer de un mapa!
Alberto Ortiz 35
Planificación de Caminos
Métodos MC:
crear suficientes caminos como para que el robot pueda
alcanzar cualquier zona del espacio libre minimizando el
número de caminos del mapa
planificación de caminos =
n conectar puntos de partida y llegada con alguno de los
caminos, y
o determinar la secuencia de caminos que conduce desde el
punto de partida al punto de llegada
variantes:
grafo de visibilidad
diagrama de Voronoi
Alberto Ortiz 36
18Planificación de Caminos
MMC: grafo de visibilidad
arcos unen todos los pares
de vértices que se ven
mutuamente
+ posiciones inicial y final
+ vértices contiguos
buscar camino más corto
Floyd, Dijkstra, ...
completo y camino de
longitud mínima
problemas:
poligonalizar entorno
caminos bordean obstáculos ⇒ “engordar” obstáculos
poco eficiente si hay muchos obstáculos
Alberto Ortiz 37
Planificación de Caminos
MMC: diag. de Voronoi
puntos que son
equidistantes a dos o más
obstáculos
para cada punto,
registrar distancia al
obstáculo más próximo
recorrer crestas del mapa 3D resultante
completo pero camino no es óptimo
Voronoi-based motion: desplazar el robot maximizando el
número de lecturas de distancia mínima a los obstáculos
circundantes (= regla para encontrar el diagrama de Voronoi)
Alberto Ortiz 38
19Planificación de Caminos
Métodos MT
dividir espacio en regiones conectadas (celdas)
construir el grafo de conectividad de las celdas resultantes
determinar en qué celdas se encuentran los puntos de partida
y llegada
buscar un camino entre la celda de partida y llegada
determinar el camino a seguir dentro de cada celda
p.e. entre puntos medios de las fronteras entre celdas
Alberto Ortiz 39
Planificación de Caminos
MMT:
descomposición
exacta
completo
depende de la
complejidad geométrica
de los obstáculos y del
número de obstáculos
eficiente para
entornos grandes con
pocos obstáculos
Alberto Ortiz 40
20Planificación de Caminos
MMT: desc. aproximada / celdas de tamaño fijo
igual que antes sobre las celdas de un mapa métrico
complejidad no depende del número de obstáculos ni de su
complejidad geométrica, sólo linealmente del número de celdas
teóricamente, no completo (pueden desaparecer caminos estrechos)
Alberto Ortiz 41
Planificación de Caminos
MMT: desc. aproximada / celdas de tamaño fijo
particularmente útil el algoritmo de expansión de frente de
onda (wavefront expansion NF1, grassfire)
ej. distancia = número de celdas visitadas con desplazamientos
horizontales y verticales, pero no diagonales
Alberto Ortiz 42
21Planificación de Caminos
MMT: desc. aproximada / celdas de tamaño
adaptativo
igual que antes
sobre celdas de
tamaño variable
definir camino
dentro de cada celda
teóricamente,
no completo
Alberto Ortiz 43
Planificación de Caminos
Métodos CP:
robot = punto bajo la influencia
de un campo de potencial
artificial o bola rodando en un
entorno inclinado
teóricamente,
no completo
(según parámetros)
Alberto Ortiz 44
22Índice
El problema de la Navegación en robots móviles
Métodos de (auto)localización
Representación de mapas
Odometría
Otros:
probabilísticos basados en mapas (sólo mencionar)
SLAM (sólo mencionar)
otros: balizas, landmarks, etc.
Planificación de caminos
Evitación de obstáculos
Bibliografía
Alberto Ortiz 45
Evitación de Obstáculos
Estos algoritmos:
No planifican a nivel global
Evitan obstáculos a medida
que los ven
Algunos emplean mapas
Variantes (entre muchas otras):
Bug: Bug1, Bug2
Histograma de Campo de Vectores: VFH, VFH+
Camino de burbujas (bubble band)
Velocidad de curvatura (curvature velocity, CVM)
Ventana dinámica
Alberto Ortiz 46
23Evitación de Obstáculos
Algoritmo Bug1
Seguir el contorno de cada obstáculo a partir de hit point
Circumnavegación completa hasta que se abandona el
seguimiento en el punto más cercano al objetivo (leave point)
Alberto Ortiz 47
Evitación de Obstáculos (ineficiente)
Algoritmo Bug2
Seguir el contorno de los obstáculos
siempre a izda o a dcha
Abandonar seguimiento cuando se corta
la M-line (= start → goal)
Alberto Ortiz 48
24Evitación de Obstáculos
Histograma de campo de vectores (VFH)
rejilla de ocupación local probabilística
histograma de direcciones que apuntan a obstáculos
n umbral para detectar direcciones probablemente obstaculizadas
o rangos de direcciones suficientemente anchos
p minimizar función de coste entre las direcciones supervivientes:
G = a × target dir diff + b × wheel dir diff + c × prev dir diff
Alberto Ortiz 49
Evitación de Obstáculos
Histograma de campo de vectores (VFH+)
histograma se construye
teniendo en cuenta las
limitaciones cinemáticas
del vehículo
movimiento compuesto
de desplazamientos rectos
y circulares
Alberto Ortiz 50
25Evitación de Obstáculos
Camino de burbujas (bubble band)
burbuja = máximo espacio libre que
puede ser alcanzado en cualquier
dirección sin riesgo de colisión
generado utilizando un mapa con
información de obstáculos estáticos y
dinámicos y un modelo simplificado del
robot
se genera un “camino de burbujas” que
conecta el punto inicial y el final ⇒
planificación global sobre un mapa
global (minimiza la “tensión” de la banda)
camino del planificador se refina para
conseguir una trayectoria suave
Alberto Ortiz 51
Evitación de Obstáculos
Velocidad de curvatura (CVM)
define velocidad de curvatura c = ω/v + movim. en arcos circulares
selecciona curvatura óptima considerando
sólo curvaturas tales que: -vmax < v < vmax, - ωmax < ω < ωmax
curvaturas que verifican restricciones cinemáticas y dinámicas
curvaturas no bloqueadas por obstáculos: trayectoria circular que
intersecciona con obstáculo (se asumen circulares)
Alberto Ortiz 52
26Evitación de Obstáculos
Ventana dinámica
(v(k), ω(k)) durante ∆t ⇒
movimiento = Σ arcos circulares
n pares (v, ω) que pueden ser
alcanzados por el robot
(aceleración máxima durante ∆t)
o sólo (v, ω) que aseguran que el
vehículo podrá parar antes de
impactar con un obstáculo
p maximizar función objetivo:
O = a × heading(v, ω) + b × velocity(v, ω) + c × distance(v, ω)
• heading = f (alineacion con el objetivo)
• velocity = g(cuanta mas velocidad mejor)
• distance = h(distancia al obstaculo mas cercano)
Alberto Ortiz 53
Evitación de Obstáculos
Alberto Ortiz 54
27Evitación de Obstáculos Evitación de Obstáculos
Alberto Ortiz
Alberto Ortiz
56
55
28Evitación de Obstáculos
Otros algoritmos:
Learning momentum
Micronavigation
T2 (Traversability and Tenacity)
aplicable a virtualmente cualquier arquitectura de control que
genere un vector de dirección para el robot
Otros ...
Alberto Ortiz 57
Índice
El problema de la Navegación en robots móviles
Métodos de (auto)localización
Representación de mapas
Odometría
Otros:
probabilísticos basados en mapas (sólo mencionar)
SLAM (sólo mencionar)
otros: balizas, landmarks, etc.
Planificación de caminos
Evitación de obstáculos
Bibliografía
Alberto Ortiz 58
29Bibliografía
Roland Siegwart, Illah R. Nourbakhsh, Introduction to Autonomous
Mobile Robots, MIT Press, 2004
Gregory Dudek, Michael Jenkin, Computational Principles of Mobile
Robotics, Cambridge University Press, 2000
J. Borenstein, H.R. Everett, L. Feng, Where am I? Sensors and
Methods for Mobile Robot Positioning, Ann Arbor, University of
Michigan,1996
(available at http://www-personal.engin.umich.edu/~johannb/position.htm)
Alberto Ortiz 59
Dpt. de Matemàtiques i
Informàtica
Universitat de les Illes
Balears
Navegación para
Robots Móviles
Alberto Ortiz
Grupo de
Sistemas,
Robótica y
Visión
30También puede leer