Serie POP-UP Documentación técnica - Itoh Denki
←
→
Transcripción del contenido de la página
Si su navegador no muestra la página correctamente, lea el contenido de la página a continuación

Serie POP-UP Documentación técnica

Índice
1. Presentación de la gama Power Moller® Página 3
2. Presentación «Pop-Up» Página 4-5
Estructura
Principio de funcionamiento
Superficie inferior del paquete a transportar
Características generales
3. Capacidad de transferencia Página 6-9
Flujo y velocidad de transferencia de cargas zona por zona en modo paquete aislado
Flujo y velocidad de transferencia de cargas en modo tren
4. Instalación del módulo Página 10-14
Principio de montaje
Dimensiones
5. Datos técnicos de las electrónicas de mando Página 15
6. Control del POP-UP Página 16-20
Principio de cronograma
Principio de control PLC
Ajustes de parámetros
Conexión de las electrónicas de mando CBM-105 / CBR-306
Electrónica de mando para M3
7. Identificación del producto, accesorios y piezas de repuesto Página 21-23
Referencia de Pop-Up estándar
Lista de Accesorios
Anexo 1 Página 24
SERIE POP-UP Documentación técnica 2 Traducción de las instrucciones originales - T1.10.1
1 - Presentación de la gama Power Moller®
Soluciones
Controles Rodillos Modulos
motorizados
Electrónica de mando Transferencia
DC Brushless
estándar a 90°
HBR-605
CB016 CB016B F-RAT-S250 CBM-105
CBR-306
CBM-105 HBR-605
F-RAT-S300 CBM-105
Electrónica de Electrónica de CBR-306
CBK-109 CBK-109B Reemplazando mando externa mando integrada CBK-109
CB030
CB016B
F-RAT-NX75 HBM-201
CB018 IB-E
IB-P
CBV-108
Transferencia
a 45°
Electrónica de mando
con lógica ZPA CBM-105
POP-UP CBR-306
HB510 HB510B Ø50 Ø50
CBM-105
HBK-608 PM500 FE
B&W AS-i 3.0
HB510 PM500 XE Wenglor
IB-E
HBV-609 CBV-108 B&W AS-i 3.0
PM500 VE HBV-609 PM500 XP Wenglor
IB-P
PEPPERL-FUCHS
PM500 FE-B
CB016B PM500 XK AS-Interface
Electrónica de mando HB510B B&W AS-i 3.0
para modulos PEPPERL-FUCHS
PM500 XC AS-Interface
Ø60,5 B&W AS-i 3.0
HBR-605
CBM-105
CBR-306 PM605 FE HB510
Ø60,5
IB-E
CBV-108 B&W AS-i 3.0
HBM-201 PM605 VE HBV-609 PM605 XE Wenglor
IB-P
B&W AS-i 3.0
PM605 FE-B
CB016B PM605 XP Wenglor
HB510B
Controlador de red
CBK-109
HBK-608
PM605 KT IB-P
IB-E IB-E
PM605 KT-B CBK-109B
IB-P
Ø32
PM320 HS CB018
Carga max a transportar
Electrónica de mando asociada Módulos / sensores compatibles Versión freno mecánico
con arreglo a la velocidad
SERIE POP-UP Documentación técnica 3 Traducción de las instrucciones originales - T1.10.1
B…W494mm×L760mm
C…W594mm×L760mm
D…W694mm×L760mm
⑥タイプ
1
2. Presentación «Pop-Up» 型式例:POP-L45D-60N-B1 左 45 度分岐、搬送速度 60m/min、NPN
Esta casete de transferencia, que utiliza la tecnología de rodillos motorizados Brushless, 24 VCC, es muy
compacta y su estructura de «casete» se integra fácilmente en los transportadores nuevos y en los de renovación.
Se puede desplazar en sus transportadores, en preparación de pedidos, en distribución o en las líneas de
montaje para adaptarse a su evolución logística. .各部名称とはたらき 3
Estructura
Tamaño D, transferencia de izquierda
Rodillo motorizado
⑥ para desviador (M2)
Rodillo motorizado
Rueda de desviación para elevación (M3)
Cubierta protectora de ruedas
l
Rodillo motorizado para
el transportador recto (M1)
L
Rodillo accionado
昇降センサ付属)
降センサ付属)
Electrónicas de mando
Correa estriada
4.電 源
m/min、NPN 入出力タイプ、サイズ B(W500mm×L774mm)、タイプ 1
CBM-105 CBR-306 ● DC24Vバッテリー
● スイッチング電源(DC24V・10A 240W)
● 整流電源(平滑コンデンサ付、リップル率10%以下)
Principio de funcionamiento ※ 電源は、負荷による変動が起きないDC24V、10A以上の安定化電源を
Es un casete de transferencia «Pop- また、ピーク電流20A、1msec以下で保護が働かない電源を使用してく
Rodillos Rueda del desviador
Up» a 45° (o 30 °) que funciona con 3
rollos motorizados sin escobilla colectora -4-
rizado (brushless), con baja tensión de 24 VCC, sin
or (M2) ラベル詳細
motorizado
energía neumática o de otro tipo.
ación (M3)La transferencia POP_UPse hace por el movimiento
DIVERTER Elevación de ruedas Bajada de ruedas del
del desviador desviador
de sube
P O P - Dy
- baja
①② -del③④desviador
- ⑤⑥ con rueda. Se
accionan como máximo
RATED INPUT:DC24V, ⑦ A dos motores a la
vez, PAYLOAD:
y solomax consume⑧147W kg
en funcionamiento
SERIAL No. ⑨⑩⑪⑫
nominal. ITOH DENKI CO.,LTD
MADE IN JAPAN
製品型式
Superficie inferior del paquete a transportar
Esta mesa de transfernecia
①分岐方向②分岐角度 está concebida
③搬送速度 ④入出力タイプ para cajas de cartón y recipientes de plástico, de fondo plano, liso y seco.
⑤サイズ⑥タイプ
No 搬送能力
está concebida para el traslado de recipientes de fondo nervado… de plástico o de metal. Para recipientes con fondo
no plano,
⑦搬送 MDRconsúltenos.
の定格電流値 ⑧可搬質量
シリアル No.( 年 月 日 ロット No)
⑨ 年 ( 下2桁 ) ⑩ 月 ⑪ 日 ⑫ロット No(3桁 )
SERIE POP-UP Documentación técnica 4 Traducción de las instrucciones originales - T1.10.1
Características generales
Tamaño A B C D
Ancho l (mm) 394 494 594 694
Dimensiones lxLxA (mm) Longitud L (mm) 760
Altura A (mm) 169
Dimensión entre bastidor mini (mm) 400 500 600 700
Dimensiones de paquetes lxL Mini 300x300
(mm) Max. 300x650 400x650 500x650 600x650
Carga máxima transportable (Kg) 30
Número de ruedas de desviador 14 18 18 24
Número de rodillos accionados de transferencia 7
Ángulo de transferencia 45° (30° opcional)
Dirección de transferencia A derecha o izquierda (especificar)
Peso (Kg) 46 49 51 54
Transportador recto : 60m/min max (adjustable)
Velocidad
Desviador a 45° : 90m/min max (adjustable)
Diferencia de nivel entre las ruedas y los rodillos (mm) 3
Bastidor acero galvanizado
Rodillo ø50mm / acero galvanizado
Longitud del cable (mm) 1500mm desde el eje del motor
Conector JST 9p macho
Rodillos motorizados
Electrónica de mando para
CBM-105-FP1-EU1 (PNP)
transportador recto y desviador
Electrónica de mando para
CBR-306FP (PNP)
elevación
Sensor de proximidad PNP, contacto normalmente abierto 24VDC (NO)
Dimensiones (mm) ø39,5
Ruedas del desviador
Materiales / Dureza Poliuretano 90ShA
Alimentación eléctrica Tensión 24VDC ± 10%
Al arranque 192W max
Potencia absorbida
Nominal 147W max
Temperatura ambiente 0 à 40°C
Entorno Humedad ≤90% Humedad relativa sin condensación
Vibración ≤0,5G
Rodillo motorizado IP54
Índice de protección
Electrónica de mando IP20
Cable de extensión (rodillo motorizado - Electrónica de mando)
Accesorios (Opcional) Soporte
Alimentación 24VDC
SERIE POP-UP Documentación técnica 5 Traducción de las instrucciones originales - T1.10.1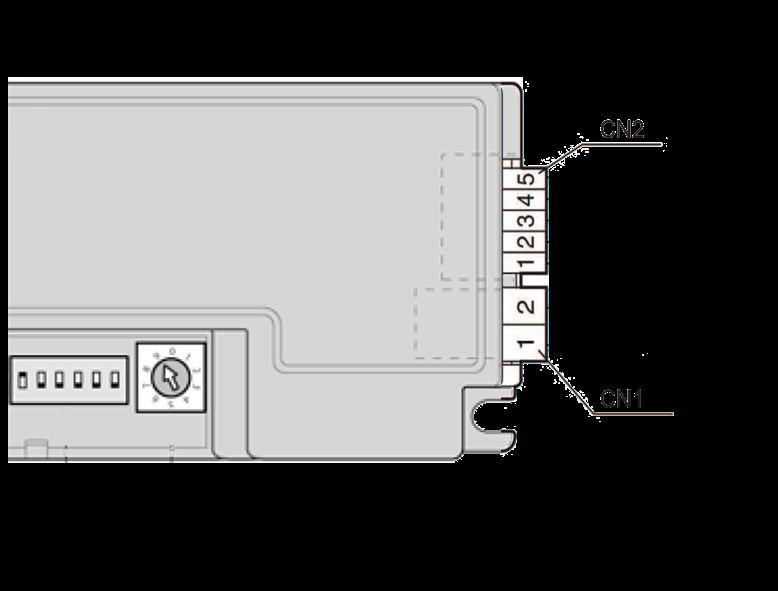
3. Chronogramme
Capacidad de Pop-Upde transferencia
Capteur de proximité
pour déviateur
en position basse
SN-S
Flujo y velocidad de transferencia de cargas zona por zona en modo paquete
Capteur de proximité aislado
pour déviateur
en position haute
Paquete 600x390mm
SN-R
5000
Paquete plástico
Ángulo de desviación : 45°
Velocidad de transferencia recto : 60m/min 4000
Rouleau moteur deVelocidad de transferencia a 45°(M2) : 90m/min
Rouleau moteur de
deviateur
Flujo de paquetes/hora
onvoyeur droit (M1)
Rouleau moteur de
levage (M3) 3000
5kg
2000 30kg
t1
1000
0
0% 20% 40% 60% 80% 100%
t0 t2
Tasa de transferencia (%)
Paquete 450x370mm
① ② ③ ④ ⑤
Capteur 0
Tasa de transferencia (%) = t1 x 100 5000
Capteur 1
t0
Capteur 2
4000
Capteur 3
Rouleau moteur de
Flujo de paquetes/hora
convoyeur droit (M1)
Rouleau moteur de 3000
deviateur (M2)
Rouleau RUN 5kg
moteur de
deviateur
30kg
(M3) DIR
El flujo del paquete depende de la 2000
dimensión, de la superficie inferior y del
material del paquete a transportar, así 1000
como del modo de transferencia, de la
tasa de transferencia...
0
Las curvas se dan a título indicativo. 0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
Paquete 360x360mm
5000
4000
Flujo de paquetes/hora
3000
5kg
2000 30kg
1000
0
0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
SERIE POP-UP Documentación técnica 6 Traducción de las instrucciones originales - T1.10.1Chronogramme de Pop-Up
Capteur de proximité
pour déviateur
en position basse
SN-S
Paquete 600x390mm
Capteur de proximité
pour déviateur 5000
en position haute
SN-R
Paquete cartón
4000
Ángulo de desviación : 45°
Velocidad de transferencia recto: 60m/min
Flujo de paquetes/hora
Velocidad de transferencia aRouleau
Rouleau moteur de 45°moteur
deviateur : 90m/min
(M2)
de
3000
convoyeur droit (M1)
Rouleau moteur de 5kg
levage (M3)
2000 30kg
1000
t1
0
0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
t0 t2
Paquete 450x370mm
5000
① ② ③ ④ ⑤
Capteur 0
Tasa de transferencia (%) = t1 x 100
4000
Capteur 1
t0
Capteur 2
Flujo de paquetes/hora
Capteur 3
3000
Rouleau moteur de
convoyeur droit (M1)
Rouleau moteur de
5kg
deviateur (M2)
Rouleau
El flujo del paquete depende de la 2000 30kg
RUN
moteur de
deviateur
dimensión, de la superficie inferior y del
DIR
(M3)
material del paquete a transportar, así
1000
como del modo de transferencia, de la
tasa de transferencia...
Las curvas se dan a título indicativo. 0
0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
Paquete 360x360mm
5000
4000
Flujo de paquetes/hora
3000
5kg
2000 30kg
1000
0
0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
SERIE POP-UP Documentación técnica 7 Traducción de las instrucciones originales - T1.10.1Chronogramme de Pop-Up
Capteur de proximité
Flujo y velocidad de transferencia de cargas en modo tren
pour déviateur
en position basse
SN-S
Capteur de proximité
pour déviateur
en position haute
SN-R
Paquete plástico Paquete 600x390mm
Ángulo de desviación : 45°
5000
Velocidad de transferencia recto : 60m/min
Rouleau moteur deVelocidad de transferencia a 45°(M2) : 90m/min
Rouleau moteur de
deviateur
convoyeur droit (M1)
Rouleau moteur de 4000
levage (M3)
Flujo de paquetes/hora
3000
5kg
2000 30kg
t1
1000
t0 t2
0
0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
① ② ③ ④ ⑤
Capteur 0
Tasa de transferencia (%) = t1 x 100 Paquete 450x370mm
Capteur 1
t0 5000
Capteur 2
Capteur 3
Rouleau moteur de
convoyeur droit (M1) 4000
Rouleau moteur de
deviateur (M2)
Rouleau RUN
Flujo de paquetes/hora
moteur de
deviateur
3000
(M3) DIR
El flujo del paquete depende de la 5kg
dimensión, de la superficie inferior y del 30kg
2000
material del paquete a transportar, así
como del modo de transferencia, de la
tasa de transferencia... 1000
Las curvas se dan a título indicativo.
0
0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
Paquete 360x360mm
5000
4000
Flujo de paquetes/hora
3000
5kg
2000 30kg
1000
0
0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
SERIE POP-UP Documentación técnica 8 Traducción de las instrucciones originales - T1.10.1Chronogramme de Pop-Up
Capteur de proximité
pour déviateur
en position basse
SN-S
Capteur de proximité
pour déviateur
en position haute
SN-R Paquete 600x390mm
Paquete cartón 5000
Ángulo de desviación : 45°
Velocidad de transferencia recto : 60m/min
4000
Velocidad de transferencia aRouleau
Rouleau moteur de 45°moteur
deviateur : 90m/min
(M2)
de
convoyeur droit (M1)
Rouleau moteur de
Flujo de paquetes/hora
levage (M3)
3000
5kg
2000 30kg
t1
1000
0
t0 t2 0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
① ② ③ ④ ⑤ Paquete 450x370mm
Capteur 0
Tasa de transferencia (%) = t1 x 100 5000
Capteur 1
t0
Capteur 2
Capteur 3 4000
Rouleau moteur de
convoyeur droit (M1)
Flujo de paquetes/hora
Rouleau moteur de
deviateur (M2)
Rouleau
El flujo del paquete depende de la 3000
RUN
moteur de
deviateur
dimensión, de la superficie inferior y del 5kg
DIR
(M3)
material del paquete a transportar, así 2000 30kg
como del modo de transferencia, de la
tasa de transferencia...
1000
Las curvas se dan a título indicativo.
0
0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
Paquete 360x360mm
5000
4000
Flujo de paquetes/hora
3000
5kg
2000 30kg
1000
0
0% 20% 40% 60% 80% 100%
Tasa de transferencia (%)
SERIE POP-UP Documentación técnica 9 Traducción de las instrucciones originales - T1.10.14. Instalación del módulo
Principio de montaje
La estructura en forma de casete se puede insertar entre los bastidores del transportador y montarse sobre 2
soportes con 4 tornillos M8.
Ancho (l)
Orificio de montaje de casete φ10
Soporte
Rodillo de
44.5 M1 Roldana desviadora transportador recto 51.5
3
114
44.5
Orificio de montaje M8
40
del soporte
44.5 671 M2 M3
Soporte opcional Soporte
760
Ver detalle página 22
El nivel del transportador recto a la entrada y a la salida del Pop-Up se debe ajustar al nivel del transportador recto.
El nivel del transportador en espiga se debe ajustar al nivel de la rueda desviadora.
Las partes laterales e inferiores de la casete de
transferencia no están protegidas contra los riesgos
mecánicos. Hay que prever una protección según la
estructura, el entorno en el que se incorporará, y de
conformidad con las normas de seguridad locales.
Hay que concebir la integración de la casete de transferencia Pop-Up de tal manera que se pueda insertar o extraer
fácilmente para permitir el mantenimiento.
Hay que prever la ubicación de 3 placas de mando de los rodillos motorizados cerca de la casete, y también los cables
de extensión.
SERIE POP-UP Documentación técnica 10 Traducción de las instrucciones originales - T1.10.1Dimensiones
8 7 6 5 4 3 2 1
Tamaño A - Transferencia a la izquierda
F F
Sensor de proximidad
21
63
Salida cable M1 para
el transportador recto
(1250mm)
Distancia interior del bastidor
E E
Posición de fijación
Anchura nominal 400
Salida cable de
2-250
sensor (50mm) 100
Orificios de montaje
(4 - Ø8,4mm)
D D
Salida cable M2 para el desviador
(1300mm) Salida cable M3 para la elevación
(1300mm)
de transferencia y el apoyo
Distancia entre el nivel
Posición de fijación 2-671
Diferencia de nivel
entre las roldanas
y los rodillos 3
101,4
C C
M1 para el
transportador recto
B B
M2
M3 para la elevación
8 7 6 5 4
para el desviador
3 2 1
Tamaño A - Transferencia a la derecha
F
GRADE
1 CREATED MODIFY APPROVED
A Matter On 17/07/18 by : C.J On 00/00/00 by : On 24/10/18 by : M.M A
Product Format
SCALE :1:5 POP-D-30D-A-L A3
21
Sensor de proximidad
Itoh Denki Europe SAS Folio 1 / 1
8 7 6 5 4 3 2 1
63
E
Distancia interior del bastidor
el transportador recto
Salida cable M1 para
Anchura nominal 400
Posición de fijación
Salida cable de
(1250mm)
sensor (50mm)
2-250
100
D
Salida cable M2 para el desviador Orificios de montaje
(1300mm) Salida cable M3 para la elevación
(1300mm) (4 - Ø8,4mm)
Posición de fijación 2-671
C
M1 para el
transportador recto
Diferencia de nivel
de transferencia y el apoyo
entre las roldanas
y los rodillos 3
Distancia entre el nivel
B
M2
101,4
para el desviador M3 para la elevación
A SERIE POP-UP Documentación técnica 11 Traducción de las instrucciones originales - T1.10.1
Format
SCALE :1:5 POP-D-30D-A-R A3
Itoh Denki Europe SAS Folio 1 / 1Tamaño B - Transferencia a la izquierda
8 7 6 5 4 3 2 1
L 760
Sensor de proximidad F
21
63
75
67
Salida cable M1 para
el transportador recto
(1250mm)
Salida cable de
E
Distancia interior del bastidor
Posición de fijación
sensor (50mm)
Anchura nominal 500
2-350
W 494
100
Orificios de montaje
(4 - Ø8,4mm)
D D
Salida cable M2 para el desviador Salida cable M3 para la elevación
(1300mm) (1300mm)
de transferencia y el apoyo
44,5 Posición de fijación 2-671
Distancia entre el nivel
Diferencia de nivel
entre las roldanas
y los rodillos 3
C C
101,4
44,5 100 94 x 6 (=564)
7
-3
50
8
M1 para el
169
transportador recto
B B
M2 M3 para la elevación
para el desviador
8
Tamaño B -7 Transferencia
6 5
a la derecha 4 GRADE
1
3
CREATED
2
MODIFY APPROVED
1
A Matter On 06/07/18 by : C.J On 00/00/00 by : On 06/07/18 by : M.M
A
Product Format
F SCALE :1:5 POP-D-30D-B-L A3
F
L 760 Itoh Denki Europe SAS Folio 1 / 1
8 7 6 5 4 3 2 1
21
Sensor de proximidad
75
67
63
Salida cable M1 para
el transportador recto
E E
Distancia interior del bastidor
Salida cable de
(1250mm)
sensor (50mm)
Anchura nominal 500
Posición de fijación
W 494
2-350
100
D D
Salida cable M2 para el desviador
(1300mm) Salida cable M3 para la elevación Orificios de montaje
(1300mm) (4 - Ø8,4mm)
C Posición de fijación 2-671
C
44,5
de transferencia y el apoyo
Distancia entre el nivel
Diferencia de nivel
entre las roldanas
y los rodillos 3
101,4
7-
38 96 x 6 (=564) 100 44,5
B B
50
M1 para el
transportador recto
169
M2
para el desviador M3 para la elevación
A A
8 7 6 5 4 3 2 1
SERIE POP-UP Documentación técnica 12 Traducción de las instrucciones originales - T1.10.1Tamaño C -7 Transferencia
6 a la izquierda
5 4 3 2 1
21
Sensor de proximidad
67
63
75
Salida cable M1 para
el transportador recto
(1250mm)
Salida cable de
Distancia interior del bastidor
sensor (50mm)
Anchura nominal 600
Posición de fijación
W 594
2-450
D 132 D
Salida cable M2 para el desviador Salida cable M3 para la elevación
(1300mm) (1300mm)
Orificios de montaje
(4 - Ø8,4mm)
44,5 Posición de fijación2-671
de transferencia y el apoyo
Distancia entre el nivel
Diferencia de nivel
entre las roldanas
L 760
y los rodillos 3
101,4
44,5 100
7-
50
M1 para el
transportador recto
169
M2
para el desviador M3 para la elevación
1
Matter
Product
8 Tamaño C7- Transferencia
6 a la derecha
5 4 3 2 1
7 6 5 4 3 2 1
F F
21
Sensor de proximidad
75
63
E E
el transportador recto
Salida cable M1 para
Salida cable de
sensor (50mm)
(1250mm)
Distancia interior del bastidor
Anchura nominal 600
Posición de fijación
132
2-450
D D
C C
Salida cable M2 para el desviador Salida cable M3 para la elevación
(1300mm) (1300mm) Orificios de montaje
(4 - Ø8,4mm)
Posición de fijación 2-671
38
B M1 para el
transportador recto
B
de transferencia y el apoyo
Diferencia de nivel
entre las roldanas
Distancia entre el nivel
y los rodillos 3
M2
101,4
para el desviador M3 para la elevación
A A
8 7 6 5 4 3 2 1
SERIE POP-UP Documentación técnica 13 Traducción de las instrucciones originales - T1.10.18 Tamaño D7- Transferencia
6 a la izquierda
5 4 3 2 1
L 760
F F
21
Sensor de proximidad
63
65
75
Salida cable M1 para
el transportador recto
(1250mm)
E Salida cable de
E
sensor (50mm)
120
Distancia interior del bastidor
Posición de fijación
Anchura nominal 700
W 694
2-550
D D
Orificios de montaje
(4 - Ø8,4mm)
C C
de transferencia y el apoyo
Distancia entre el nivel
Salida cable M2 para el desviador
Diferencia de nivel
entre las roldanas
(1300mm) Salida cable M3 para la elevación
y los rodillos 3
(1300mm)
101,4
44,5 Posición de fijación 2-671
44,5 100 94 x 6 (=564)
50
B B
7- 38
169
M1 para el
transportador recto
M2
para el desviador M3 para la elevación
A A
Tamaño
8 D - Transferencia
7 6 a la derecha
5 4 3 2 1 Format
A3
8 7 6 5 4 3 2 1
L 760
F F
Sensor de proximidad
21
67
75
63
E E
el transportador recto
Salida cable M1 para
(1250mm)
Distancia interior del bastidor
Salida cable de
sensor (50mm)
Anchura nominal 700
Posición de fijación
2-550
W 694
D D
120
C C
Salida cable M2 para el desviador Salida cable M3 para la elevación
(1300mm) (1300mm) Orificios de montaje
(4 - Ø8,4mm)
de transferencia y el apoyo
Distancia entre el nivel
Diferencia de nivel
entre las roldanas
y los rodillos 3
Posición de fijación 2-671 44,5
101,4
B 94x6(=564) 100 44,5 B
50
M1 para el
7- 38 transportador recto
169
A A
M2 M3 para la elevación
para el desviador
8 7 6 5 4 3 2 1
SERIE POP-UP Documentación técnica 14 Traducción de las instrucciones originales - T1.10.15. Datos técnicos de las electrónicas de mando
CBM-105 CBR-306
129
120
STATUS/ERR/PWR
CBR-306F□
1. AUTO/MANU
3. DIRECTION
5.PLS
5. MDL/TEST
M3:Lifting MDR MODULE
4.5
2. INT-TIME
4.ERR
4. E/N-OUT
3.N.A
9 0 1 2.DIR
1.RUN
7 8
2 3
52
40
N.A
N.A
456
0V
24V
90 1
23
78
18
456
4.5
38.5 47
23
3
3
CBM-105 + PM500FE / FC CBR-306 + PM500FE
Alimentación eléctrica 24 V DC ±10%
Tensión nominal 24 V DC
estática 0,03 A
Intensidad nominal 2,9 A / 3,2 A 2,9 A
Al arranque 4,0 A
Conector 24V CN1 0,5 à 1,5 mm2 (AWG : 20 ~ 14), WAGO 734-102
Dimensión del cable
Conector de control CN2 0,08 à 0,5mm2 (AWG : 28 ~ 20), WAGO 733-105
Diferencia de tiempo entre la señal de encendido y
Menos de 15 ms
la puesta en marcha del motor
Fusible 6,3A Fusible 7A
Protecciones
Diodo contra el fallo de cableado
95°C para la electrónica de mando
Protección térmica
105°C para el motor
Limitador de corriente 4,0A
Temperatura ambiente 0 à 40°C
Humedad ≤90% humedad relativa sin condensación
Atmósfera No gas corrosivo
Vibraciónes Menos de 0,5 G
Instalación Interior
Función de apagado automático NA Después de 160 pulsos
Consulte la documentación técnica CBM-105 y CBR-306 para más detalles.
SERIE POP-UP Documentación técnica 15 Traducción de las instrucciones originales - T1.10.1en position haute
SN-R
SN・R SN・S
5 Sensor 4 Rouleau moteur de
6. C Rouleau moteur de
ontrol del
convoyeur droit (M1) Pop-Up deviateur (M2)
4 Sensor 3 Rouleau moteur de
levage (M3)
Cronograma principio
1 2 3 SN・R SN・S
5 Sensor 4
M1
Sensor 0 C/V M2 M3
Sensor 3 Sensor 6
4
Sensor 1 Sensor5
Sensor 2
1 2 3
Sensor 3
M1
Sensor 0 C/V M2
1 2 Sensor 6
M3
Sensor 1 Sensor5
Mesa Pop-Up
Sensor 2
Sensor 0 Sensor 1 Sensor 2
Cronograma
PLC ① ② ③ ④ ⑤
IN Sensor 0
IN Sensor 1
IN Sensor 2
IN Sensor 3
Rodillo motorizado para
OUT el transportador recto (M1)
Rodillo motorizado para
OUT el desviador (M2)
Rodillo
motorizado RUN
OUT para el
desviador
(M3) DIR
Sensor de proximidad
IN para desviador
en posición baja SN-S
Sensor de proximidad
IN para desviador
en posición alta SN-R
Advertencia : ≤ 0,03s Advertencia : ≤ 0,03s
Advertencia: Debemos ajustar el tiempo de envío de la señal de parada a menos de 0,03 s después de la detección del sensor SN-S y SN-R
Advertencia: Debemos ajustar el tiempo de envío de la señal de parada a menos de 0,03 s después de la detección
del sensor SN-S y SN-R
Principio de control por plc
POP-UP PLC
OUT IN
Rodillo motorizado para CN2-1 Sensor 0
el transportador recto M1 M1 CBM-105
CN2-1 PLC Sensor 1
Rodillo
POP-UP motorizado para M2 CBM-105
el desviador M2 OUT IN Sensor 2
Rodillo motorizado para CN2-1 CN2-1 Sensor 0
recto M1 para M1
Rodillo motorizado Sensor 3
CBM-105
el transportador
la elevación M3 M3 CBR-305
CN2-1 CN2-2 Sensor 1
Rodillo motorizado para M2 CBM-105 Sensor 4
el desviador M2 Sensor 2
Señal «Encendido»
CN2-1 para Sensor 5
El transportador
Rodillorecto
motorizado
Sensor para
para desvidador OUT el transportador arriba Sensor 3
puede ser la elevación M3 M3
en posición baja SN-S
CBR-305
CN2-2 Sensor 6
accionado en "ON" Señal «Encendido» para Sensor 4
el desviador
Señal «Encendido» para
El desviador recto
El transportador puede Sensor para desvidador OUT Sensor 5
Sensorenpara desvidador OUT el transportador arriba
ser accionado
puede ser posición alta SN-R Señal «Encendido» para Sensor 6
en posición baja SN-S Señal «Encendido» para recto
en "ON"en "ON"
accionado el transportador
el desviador
El desviador puede Sensor para desvidador OUT
ser accionado en posición alta SN-R Señal «Encendido» para
en "ON" el transportador recto
SERIE POP-UP Documentación técnica - 14 -
16 Traducción de las instrucciones originales - T1.10.1
- 14 -Ajustes de parámetros
■ ドライバの設定
Electrónica de mando por M1 y M2
Chronogramme de Pop-Up
M3:昇降用は設定済のため、変更しないでください。
Capteur de proximité
pour déviateur
注意
■ ドライバの設定 変更すると故障の原因となります。 ON 90 1
詳細仕様につきましては、付録 1. CBR-305F□ 詳細(P.25)をご確認ください。
23
78
en position basse
SN-S 1 2 3 4 5 4 56
VR1 VR2 SW1
apteur de proximité
pour déviateur M3:昇降用は設定済のため、変更しないでください。
SW2
en position haute
SN-R 注意
M1:直進用/M2:分岐用
変更すると故障の原因となります。
CB-016□ M3:昇降用 CBR-305F□-B
VR1 - Aceleración
詳細仕様につきましては、付録 1. CBR-305F□ 詳細(P.25)をご確認ください。
※□=N(NPN 入出力)または P(PNP 入出力) ※□=N(NPN
VR2 - Deceleración 0 s.入出力) または
2,5 s. P(PNP 入出力)
La configuración de fábrica se establece en 0s (girada
M1:直進用/M2:分岐用
Rouleau moteur de
completamente
M3:昇降用 hacia la izquierda)
CBR-305F□-B
STATUS/ERR/PWR
leau moteur de CB-016□
deviateur (M2) CB-016□ CBR-305F□-B
1. AUTO/MANU
1. AUTO/MANU
3. DIRECTION
3. DIRECTION
voyeur droit (M1) 5.PLS 5.PLS
SPEED 4.ERR M3:昇降用 SPEED 4.ERR
6. N/P-OUT
4. E/N-OUT
4. E/N-OUT
Rouleau moteur de
※□=N(NPN 入出力)または P(PNP
2. INT/EXT
2. INT/EXT
入出力)3.V-IN
5. SV-BRK
入出力)または P(PNP
● Transferencia a la izquierda
※□=N(NPN 入出力)
ERR/PWR
3.V-IN
VR1-ACC
VR1-ACC
VR2-DEC
VR2-DEC
901 2.DIR 9 0 1 2.DIR
levage (M3)
5. L/H
DIR (M3)
1.RUN 1.RUN
7 8
7 8
23
2 3
deviateur 456 456
moteur de
RUN Rouleau 0V 0V
24V 24V
STATUS/ERR/PWR
90 1 90 1
CB-016□ CBR-305F□-B
deviateur (M2)
23
1. AUTO/MANU
1. AUTO/MANU
23
6. N/P-OUT 7 8
78
3. DIRECTION
3. DIRECTION
Rouleau moteur de 456
5.PLS 5.PLS
456
SPEED 4.ERR M3:昇降用 SPEED 4.ERR
SW5
4. E/N-OUT
4. E/N-OUT
2. INT/EXT
2. INT/EXT
convoyeur droit (M1)
5. SV-BRK
ERR/PWR
3.V-IN 3.V-IN
VR1-ACC
VR1-ACC
VR2-DEC
VR2-DEC
901 9 0 1
Rouleau moteur de
2.DIR 2.DIR
5. L/H
1.RUN 1.RUN
7 8
7 8
23
2 3
VR1 VR2 SW1 SW5 VR1 VR2 SW1
Capteur 3 456 456
Capteur 2 0V 0V
24V 24V
90 1 90 1
Aceleración / Sentido de Salida Selección de una
23
23
78
78
Capteur 1 456 456
Capteur 0
deceleración rotación señal de error velocidad fija SW5
VR1 VR2 SW1-3
VR1 VR2 SW1 SW5 VR1 VR2 SW1-1SW1 SW1-2
M1
④ ③ ② ①
ON OFF
para el transportador recto
Aceleración / Sentido
1
de
2 3 4 5
Salida Selección de una
deceleración OFF
rotación señal de error velocidad fija
SW2
VR1 VR2 SW1-3
VR1 VR2 SW1-3 ON
M2 9 0 1 SW1-2
① ② ③ ④ ⑤
SW1-1
M1
23
Capteur 0
78
ON OFF
parapara el desviadorrecto
el transportador
456
Capteur 1 11 22 33 44 55
OFF
Capteur 2
SW1-3 SW1-6 / NPN SW2
VR1 VR2 SW1-3
ON
Capteur 3
M2 901
VR1 VR2 SW2
23
78
ouleau moteur de
nvoyeur droit (M1) para el desviador 6 456
ouleau moteur de
deviateur (M2)
M3 1 2 3 4 5
OFF 901
para la elevación
23
78
1 2
SW1-3 3 4 5 SW1-6 / PNP
uleau RUN SW1-6 / NPN 456
ON
eur de
iateur
OFF
M3) DIR
levage (M3)
VR1 VR2 SW2
66
No cambie.
Rouleau moteur de
M3
convoyeur droit (M1)
OFF 0 9 1
● Transferencia a la derecha
deviateur (M2) Rouleau moteur de
para la elevación
23
78
Rouleau moteur de
1 2 3 4 5 SW1-6 / PNP
Aceleración / Sentido de Salida Selección de una
456
ON
OFF
deceleración rotación señal de error velocidad fija
VR1 VR2 SW1-3
ON
6
No cambie.
SN-R M1 SW1-1 SW1-2
ON OFF
para el transportador recto
en position haute
pour déviateur Aceleración / Sentido
1 2 3 4 de5 Salida Selección de una
Capteur de proximité
deceleración rotación señal de error velocidad
SW2
fija
VR1 VR2 SW1-3
SN-S
VR1 VR2 SW1-3
en position basse
M2
M1
ON 901
SW1-1 SW1-2
23
pour déviateur
78
ON OFF
parapara el desviadorrecto
el transportador
Capteur de proximité 456
1 2 3 4 5
1 2 3 4 5
Chronogramme de Pop-Up OFF
SW1-3
SW1-3 SW1-6 / NPN SW2
VR1 VR2
M2 VR1 VR2
901
SW2
23
78
para el desviador 6
M3
456
1 2 3 4 5
OFF
OFF 901
para la elevación
23
78
1 2
SW1-3 3 4 5 SW1-6 / PNP
SW1-6 / NPN 456
ON
OFF
VR1 VR2 SW2
66 No cambie.
M3 OFF 901
para la elevación
23
78
1 2 3 4 5 SW1-6 / PNP 456
ON
OFF
Para M1: ajustar los potenciómetros VR1 y VR2 al mínimo girando el mando completamente hacia
6 la izquierda.
No cambie.
Para M2: ajustar el速度設定
potenciómetro VR1 al mínimo girando el mando completamente hacia la izquierda, y VR2 al máximo
girando el mando completamente hacia la derecha. (m/min)速度精度:±3%
Consulte la documentación técnica CBM-105 para más
SW1#5:ON
detalles. SW1#5:OFF
速度設定
SW2 9 8 7 6 5 4 3 2 1 0 9 8 7 6 5 4 3 2 1 0
M1:直進用 53.5 53.5 53.5 51.4 48.9 46.3 41.2 38.6 36.0 33.4 30.9 28.3 25.7 23.1 20.6 18.0 15.4 12.9 速度精度
(m/min) 10.3 :7.7
±3%
SERIE POP-UP
M2:分岐用 D90.2
ocumentación técnica
90.2 90.2 85.8 SW1#5:ON 1764.4
81.5 77.4 68.6 60.0 55.9 Traducción de las38.5
51.6 47.2 42.9 instrucciones
34.4 30.2 originales
SW1#5:OFF 25.8 21.5 -17.1
T1.10.1
12.8
SW2 9 8 7 6 5 4 3 2 1 0 9 8 7 6 5 4 3 2 1 0Cableado de electrónicas de mando CBM105 / CBR306
M1 M2
Serie PM500FC
Serie PM500FE
* 2 Código velocidad 90
*11 SN-S M3
Série PM500FE
* SN-R
* 2 Código velocidad 17
CN2
CN2
CBM-105FP1-EU1
STATUS/ERR/PWR
CN3 CN3 CBR-306F□
1. AUTO/MANU
SPEED L / H
3. DIRECTION
5.PLS
5. MDL/TEST
M3:Lifting MDR MODULE
2. INT-TIME
4.ERR
4. E/N-OUT
9 0 1 3.N.A
9 0 1 2.DIR
7 8
2 3
1.RUN
7 8
2 3
4 5 6
N.A
N.A
456
0V
CBM-105
CN1 24V
901 90 1
CN1
LED1
M1 M3
78
23
23
78
456 456
LED2
VR1 ACC VR2 DEC SW2
1 2 3 4 SW1
*1 Cable de extensión sensor SN-S / SN-R (no incluido)
CN2
CN3
CBM-105FP1-EU1 *2 Cable de extensión rodillo motorizado (M1 / M2 / M3) (en opción)
SPEED L / H
9 0 1
7 8
2 3
4 5 6
CBM-105 LED1
901
M2 CN1
78
23
456
LED2
VR1 ACC VR2 DEC SW2
1 2 3 4 SW1
Es necesario prever cables de extensión para el sensor y para los rodillos motorizados, dependiendo de la ubicación
de las placas de mando, PLC, etc.
Version PNP : CBM-105 Version PNP : CBR-306
CN2 CN2
▶ Señal de impulsos ▶ Señal de impulsos
▶ Señal de error ▶ Señal de error
◀ Variación de velocidad (0~10V)
◀ Sentido de rotación ◀ Sentido de rotación
◀ Encendido / Apagado ◀ Encendido / Apagado
0 VDC 0 VDC
24 VDC 24 VDC
CN1 CN1
Conexión y característica del sensor SN-R / SN-S
Modelo GX-F12A-P (Panasonic)
Tensión de alimentación 12~24 VDC +10-15%
Marrón : 24VDC
Intensidad absorbida ≤15mA
Azul : 0VDC
Intensidad max : 100mA Negro : OUT
Colector abierto
PNP contacto normalmente abierto (NO)
Si la salida está conectada a una carga
Señal de salida inductiva (por ejemplo, bobina de relé,
solenoide, actuador, etc.), asegúrese de
proteger la salida contra sobretensión
(tensión de retorno) con un diodo de
protección.
SERIE POP-UP Documentación técnica 18 Traducción de las instrucciones originales - T1.10.1Ajuste de velocidad de rodillo motoriazdo para el transportador recto (M1) y rodillo
motorizado para el deflector (M2)
Por SW1 y SW2 en la electrónica de mando CBM105-FP1-EU1
No cambie la velocidad de rodillo motorizado para levantamiento (M3)
Selección de una velocidad fija nominal 9 0 1
9 0 1 +
7 8
2 3 4
+
7 8
2 3 4
6 5
1 2 3 4 5 6 1 2 3 4 5 6
SW2
6 5
SW1 (1 - ON) SW2 SW1 (1 - OFF)
SW2 Código 60 Code 90 (M2) SW2 Código 60 Code 90 (M2)
(M1) (M1)
9 53,5 90,2 9 30,9 51,6
8 53,5 90,2 8 28,3 47,2
7 53,5 90,2 7 25,7 42,9
6 51,4 85,8 6 23,1 38,5
5 47,3 81,5 5 20,6 34,4
4 46,3 77,4 4 18 30,2
3 41,1 68,6 3 15,4 25,8
2 38,6 64,4 2 12,9 21,5
1 26 60,0 1 10,3 17,1
0 33,4 55,9 0 7,7 12,8
Por voltaje analógico externo
• Variación de la velocidad por tensión analógica externa entre 0 y 10
VCC cuando el selector 2 de SW1 está «ON».
• Corriente de entrada a 2 mA máximo 10 VDC.
◀ 0-10 VDC IN
Conecte el 0VDC de la alimentación analógica externa al 0VDC de
la alimentación de la electrónica de mando
. No exceda 10VDC
ON
1 2 3 4 5 6
SW1
SERIE POP-UP Documentación técnica 19 Traducción de las instrucciones originales - T1.10.1Electrónica de mando para M3
STATUS/ERR/PWR
CBR-306F□ 90 1
1. AUTO/MANU
3. DIRECTION 5.PLS
5. MDL/TEST
M3:Lifting MDR MODULE
2. INT-TIME
4.ERR
23
4. E/N-OUT
78
3.N.A
9 0 1 2.DIR
456
7 8 1.RUN
2 3
N.A
N.A
456
Non utilisés SW1 SW5
0V
24V
90 1
1
23
78
456
5
SW1 OFF
SW5
• El SW5 conmutador rotativo selecciona el tipo de módulo para ser controlado. Para el módulo POP-UP, establezca en «1».
• El SW1-5 dip-switch tiene el «modo de prueba» que se utiliza para ajustar el nivel del transportador de aguas arriba y aguas
abajo de la mesa de transferencia. Para hacer esto, establezca SW1-5 en «ON». Para encender el módulo, configúrelo en
«OFF».
• Consulte la documentación técnica CBR-306 y el manual de instalación.
SERIE POP-UP Documentación técnica 20 Traducción de las instrucciones originales - T1.10.17. Identificación del producto, accesorios y piezas de repuesto
Referencia de Pop-Up estándar
Tamaño Evacuación izquierda Evacuación derecha
A PUP-45L60P-A-F000 PUP-45R60P-A-F000
B PUP-45L60P-B-F000 PUP-45R60P-B-F000
C PUP-45L60P-C-F000 PUP-45R60P-C-F000
D PUP-45L60P-D-F000 PUP-45R60P-D-F000
PUP – [ 1 ] [ 2 ] [ 3 ] [ 4 ] - [ 5 ] - [ 6] [ 7 ]
[ 1 ] Angulo de desviación
45° … 45° (30° … 30° en option)
[ 2 ] Dirección de evacuación
L … Evacuación izquierda
R …Evacuación derecha
[ 3 ] Velocidad de transportador recto
60 ... Código velocidad 60 (60m/min)
[ 4 ] Lógica de sensor de proximidad
N ... NPN
P ... PNP
[ 5 ] Tamaño
A … W 394 x L 760 mm
B … W 494 x L 760 mm Ejemplo :
C … W 594 x L 760 mm
D … W 694 x L 760 mm PUP-45L60P-B-F00
[ 6 ] Tipo de rodillo motorizado
F ... Serie PM500FE (Angulo de 45°, evacuación izquierda,
Código velocidad 60m/min, PNP, 494x760mm,
[ 7] Índice de variante
rodillo motorizado PM500FE, indice 0).
0 ... Estandard
1 ...
....
SERIE POP-UP Documentación técnica 21 Traducción de las instrucciones originales - T1.10.1■ 交換品一覧
Lista de Accesorios (Opcional)
品 名 品 番
Soporte de casete
分岐ローラ用
1 Dimensión Número de 00000000000000
Tamaños 連動ベルト(丸ベルト) Referencia
BF A soportes
ローラ連動ベルト フリーローラ ⇔ フリーローラ 2PJ286
A 2 400 250 2 PUP-SUP-A
(直進搬送用 V リブドベルト) MDR ⇔ フリーローラ 3PJ316
B 500 350 2 PUP-SUP-B
C 3 600分岐ローラ
450 2 PUP-SUP-C
POP-D-ROL
D 700 550 2 PUP-SUP-D
(サイズ A /サイズ B /サイズ C /サイズ D)
4 están
Los tornillos 直進 MDR
incluidos. PM500FE-60-( 305 / 405 / 505 / 605 )-D-024-JW-C150-VG
フリーローラ (サイズ A /サイズ B /サイズ C /サイズ D)
5 ARI-38-( 329 / 429 / 529 / 629 )-HX-VG
(直進搬送用)
CB-016□6 (M1:直進/ M2:分岐用) □:入出力タイプに合わせ、
6 ドライバ N = NPN / P = PNP タイプをご指定ください。
CBR-305F□-B(M3:昇降用)
Alimentación 24 VDC
■ オプション品一覧(延長ケーブル他)
Referencia Referencia Salida Potencia Boost
● 専用ステー (mm)
サイズ CT-10-241
フレーム内寸法 A 寸法 24V-10A 240W 120%
380~480V
A QT-20-241
400以上 499以下 250 24V-20A 480W 150%
3 ph
B 500以上 599以下 350
QT-40-241 24V-40A 960W 150%
C 600以上 699以下 450
D 700 550
- Corriente de entrada muy baja.
65 フレーム内寸法
- Acepta
15
una sobreintensidad
67
de 120 a 150% al arranque
A
(según el modelo)
3.2
35
17.5
8
φ
40 12.5 A 67
10
2-
φ
2x
4-
Cables de extensión para los rodillos motorizados
● 延長ケーブル
Lado macho
Longitud de
型cable
式 (mm) Referencia
ケーブル仕様
Lado hembra
ACE-CBM-B0600
600 9P 延長ケーブル長 600mm
ACE-CBM-B0600
ACE-CBM-B0850 〃 850mm
1200 ACE-CBM-B1200
ACE-CBM-B1200 〃 1200mm
60 ±5
37
L
● ドライバ固定板(F-RAT-S1-DB)
53 2-φ6.5
30 180
20 70 55
206
SERIE POP-UP Documentación técnica 22 Traducción de las instrucciones originales - T1.10.1
29.3 122 28.7 ドライバ取付位置Piezas de desgaste y frecuencia de cambio
Correa redonda (1)
Roldanas de desviación (4)
Rodillo motorizado
para transportador recto Referencia Frecuencia*
MXP5-04/87F
1 Correa redonda 5 millónes
L=260mm
2 Correa estriada para 3PJ316
10 millónes
3 transportador recto 3PJ286
4 Roldana de deviacón POP-UP-IW-A 5 millónes
Correa estriada (2)
Correa estriada (3)
* La frecuencia de cambio expresada en el número de
paquetes tratadosse da a título indicativo
Lista de componentes (excluyendo las piezas de desgaste)
Rodillo motorizado Tamaño A Tamaño B Tamaño C Tamaño D
M1 (transportador
PM500FE0600305XP0CN400 PM500FE0600405XP0CN400 PM500FE0600505XP0CN400 PM500FE0600605XP0CN400
recto)
M2 (desviador) PM500FC0900256XP0DN400 PM500FC0900356XP0DN400 PM500FC0900456XP0DN400 PM500FC0900556XP0DN400
M3 (elevación) PM500FE0170269XP0LN400 PM500FE0170369XP0LN400 PM500FE0170469XP0LN400 PM500FE0170569XP0LN400
Rodillo accionado FR380IDZDS0326XV0SN400 FR380IDZDS0426XV0SN400 FR380IDZDS0526XV0SN400 FR380IDZDS0626XV0SN400
Electrónica de mando de los rodillos motorizados M1 y M2 CBM-105FP1-EU1
Lógica PNP M3 CBR-305FP-B
Sensores de proximidad SN-S y SN-R GX-F12A -P (PANASONIC)
SERIE POP-UP Documentación técnica 23 Traducción de las instrucciones originales - T1.10.1Anexo 1 El fabricante: ITOH DENKI CO., Ltd 1146-2 Asazuma-Cho, Kasai, Hyogo 679-0105 Japan Distribuido en Europa por: ITOH DENKI Europe SAS 490 avenue des Jourdies - PAE les Jourdies - BP 323 74807 St Pierre en Faucigny Cedex - France declara por la presente que la serie de productos: Pop-Up es una máquina incompleta conforme a lo establecido por la directiva CE para máquinas y por tanto no cumple en su totalidad los requisitos de esta directiva. Se prohíbe su puesta en funcionamiento hasta que el conjunto de la máquina / la instalación a la que se integre sea declarada en conformidad con la directiva CE para máquinas. Persona autorizada para crear la documentación técnica : ITOH DENKI CO., Ltd Toshiyuki TACHIBANA 1146-2 Asazuma-Cho, Kasai, Hyogo 679-0105 Japan ITOH DENKI EUROPE SAS Masayuki SHIMODA 490 Avenue des Jourdies, 74800 St Pierre en Faucigny - Francia Directivas CE aplicadas : • Directiva relativa a la CEM 2014/30/CE • Directiva europea RoHS 2011/65/EU ITOH DENKI EUROPE SAS, se compromete a remitir, previa solicitud debidamente motivada de las autoridades nacionales, la información pertinente relativa a la cuasi-máquina. Saint Pierre en Faucigny, el 19 de julio de 2021 T. AKASHI, Director General SERIE POP-UP Documentación técnica 24 Traducción de las instrucciones originales - T1.10.1
Technology for tomorrow
ITOH DENKI
490 Av. des Jourdies - P.A.E. les Jourdies
74800 St Pierre en Faucigny - France
Phone : +33 (0)4 50 03 09 99 Fax : +33 (0)4 50 03 07 60
www.itoh-denki.comTambién puede leer